DarwinFPV GM8 防干渉ドローンGPSモジュール - UBLOX GPS/GLONASS、10Hz、5V、MX1.25-4
DarwinFPV GM8 防干渉ドローンGPSモジュール - UBLOX GPS/GLONASS、10Hz、5V、MX1.25-4
DarwinFPV
通常価格
$18.99 USD
通常価格
セール価格
$18.99 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
DarwinFPVアンチインターフェアレンスドローンGPS(GM8)は、空中ドローンGPSハードウェアソリューションに基づくドローンGPSモジュールであり、マルチ周波数の強干渉除去技術とマルチパス信号検出および除去技術を使用して、より安定した信頼性の高い位置決めを実現しています。その通信プロトコルはBetaFlightと互換性があるように修正されており、安定したGPS性能を必要とするFPVドローンに適しています。
主な特徴
- 安定性向上のための多周波強干渉除去技術と多経路信号検出および除去技術
- より安定した信号受信のための高利得全方向パッチアンテナ
- BetaFlight互換通信プロトコル(UBLOX)
- GPS/GLONASSをサポート
仕様
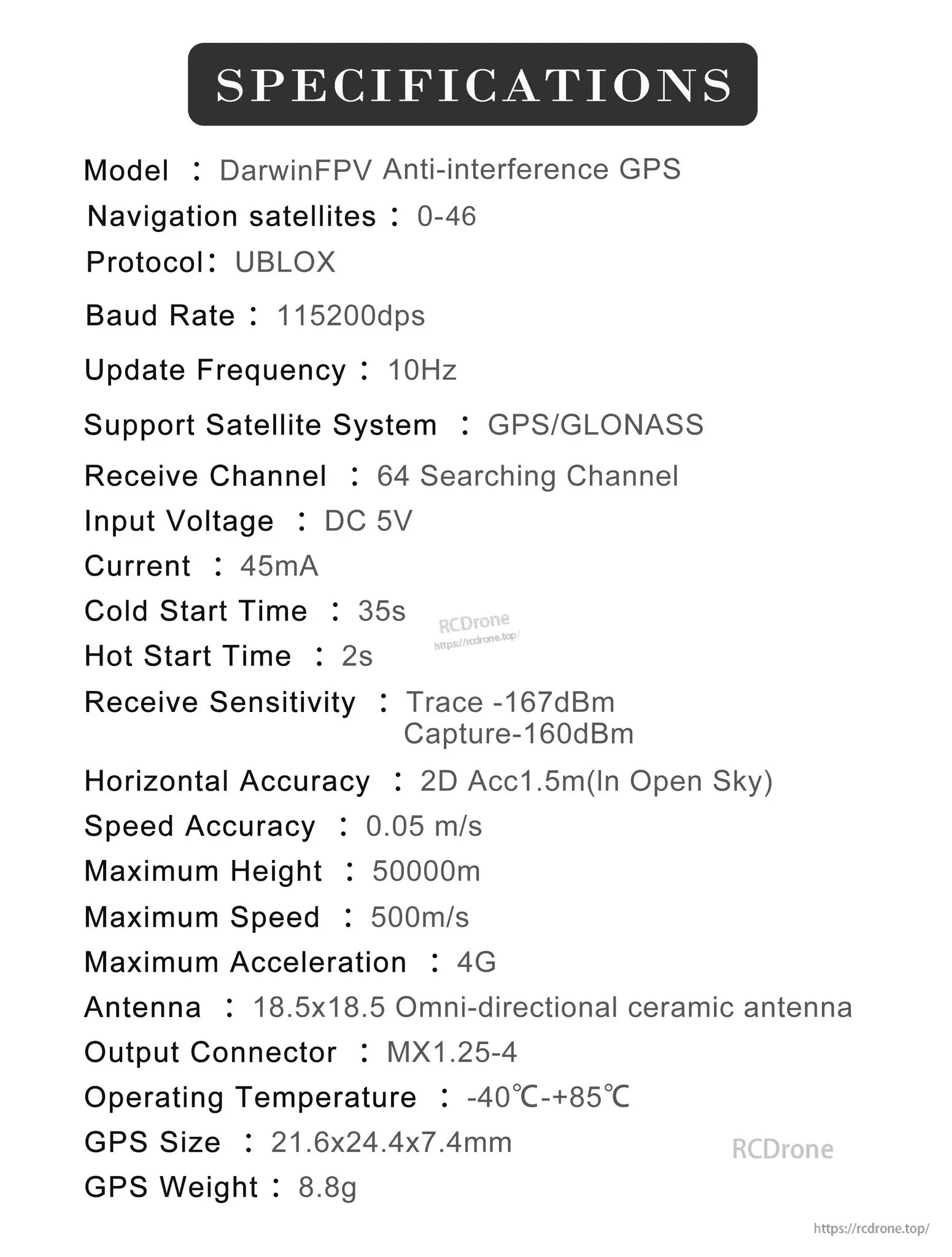
| モデル | DarwinFPV干渉防止GPS |
| ナビゲーション衛星 | 0-46 |
| プロトコル | UBLOX |
| ボーレート | 115200dps |
| 更新頻度 | 10Hz |
| サポート衛星システム | GPS/GLONASS |
| 受信チャンネル | 64検索チャンネル |
| 入力電圧 | DC 5V |
| 電流 | 45mA |
| コールドスタート時間 | 35秒 |
| ホットスタート時間 | 2秒 |
| 受信感度 | トレース -167dBm; キャプチャ -160dBm |
| 水平精度 | 2D Acc1.5m (オープンスカイにて) |
| 速度精度 | 0.05 m/s |
| 最大高度 | 50000m |
| 最大速度 | 500m/s |
| 最大加速度 | 4G |
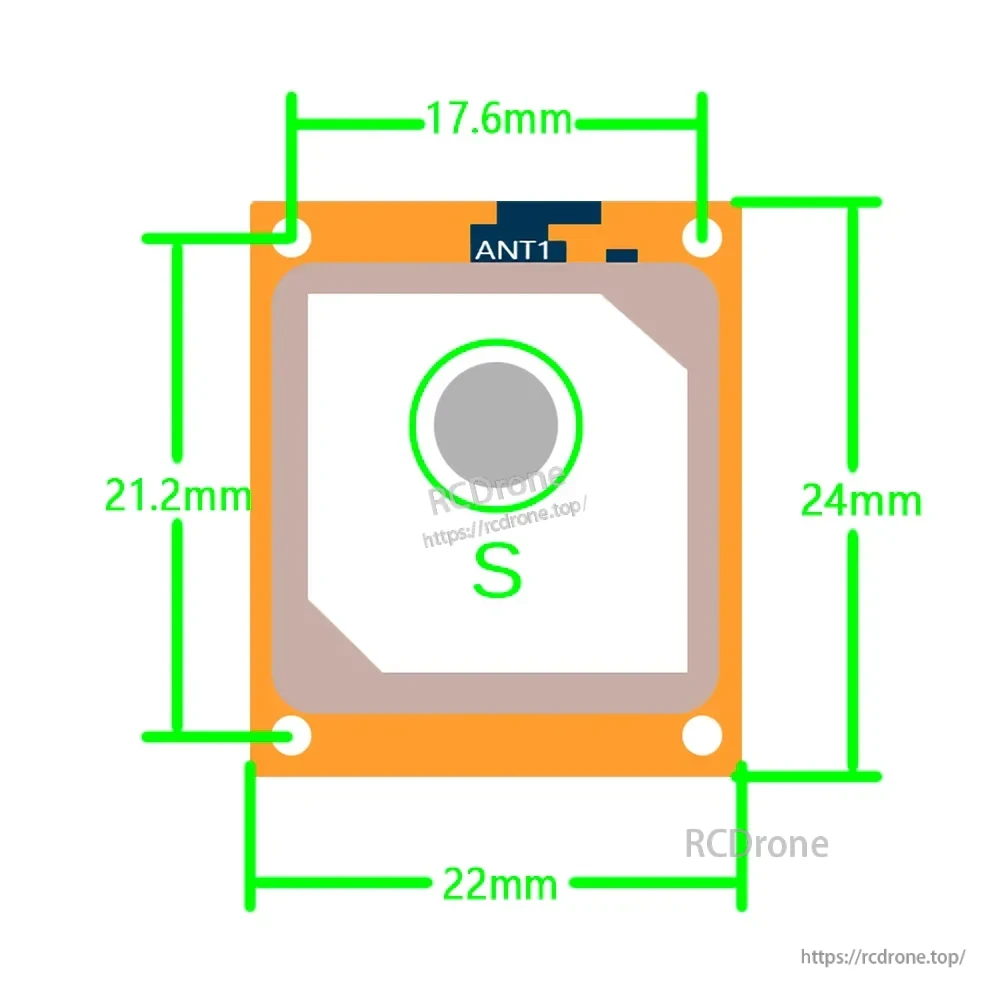
| アンテナ | 18.5x18.5 オムニ方向性セラミックアンテナ |
| 出力コネクタ | MX1.25-4 |
| 動作温度 | -40°C-+85°C |
| GPSサイズ | 21.6x24.4x7.4mm |
| GPS重量 | 8.8g |
セットアップノート (BetaFlight / INAV)
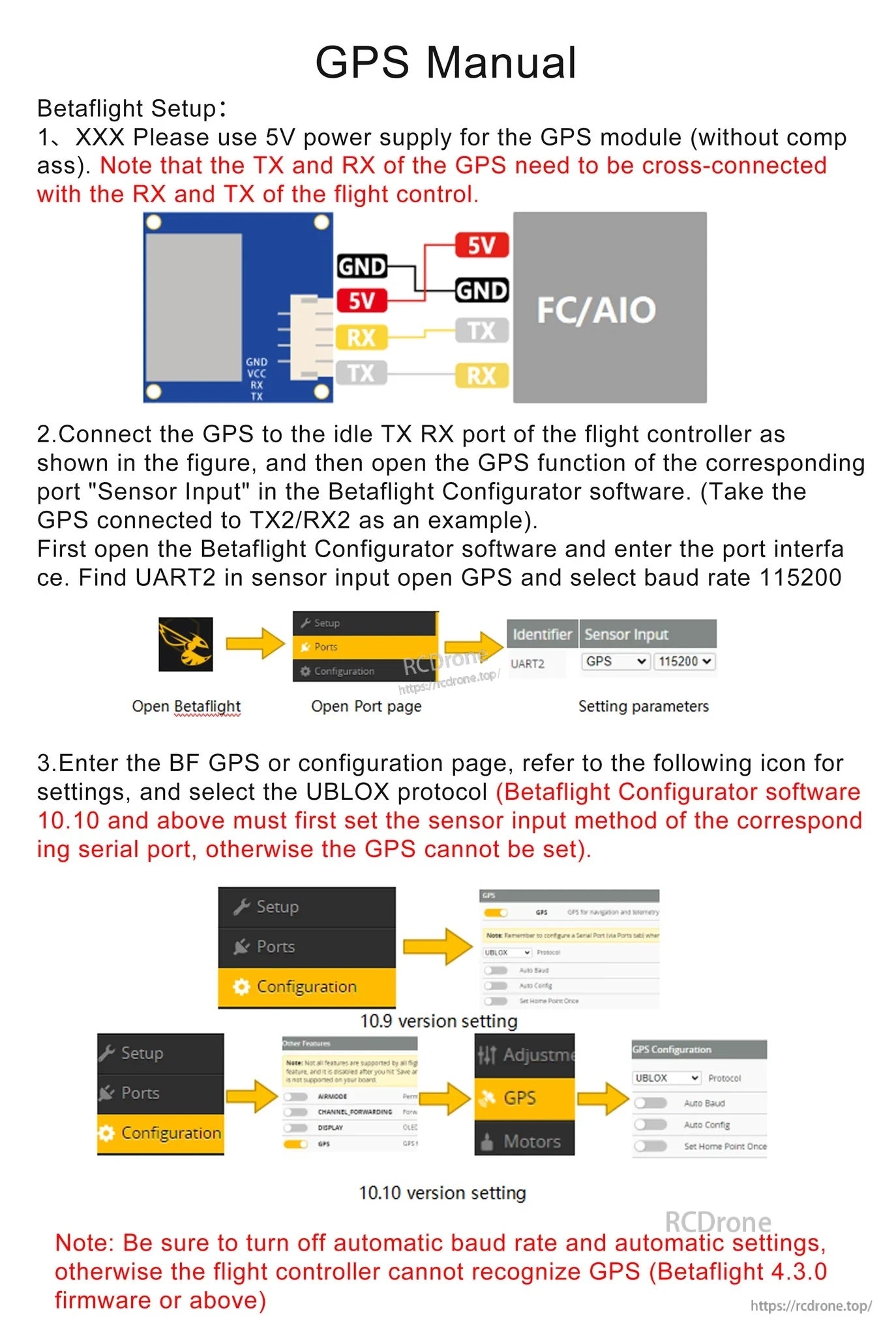
- GPSモジュールには5V電源を使用してください。
- TXとRXはGPSとフライトコントローラー間でクロス接続する必要があります(GPS TXをFC RXに、GPS RXをFC TXに接続)。
- BetaFlight Configurator / INAV Configuratorで、選択したシリアルポート(例:TX2/RX2)でGPSを有効にし、ボーレートを115200に設定します。
- GPSプロトコルとしてUBLOXを選択します。
- フライトコントローラーがGPSを認識できない場合は、自動ボーレートと自動設定をオフにしてください(BetaFlight 4.3.0ファームウェア以上に注意)。
- 屋内でGPS位置決め衛星を検索しないでください。屋外の開けた場所でテストしてください。
同梱物
- 1 x DarwinFPV GM8対干渉ドローンGPS
- 1 x MX1.25_6PからSH1.0_4Pへの接続ケーブル
- 1 x ステッカー
インストールまたは設定のヘルプが必要な場合は、[email protected] orに連絡するか、https://rcdrone.top/ .
詳細
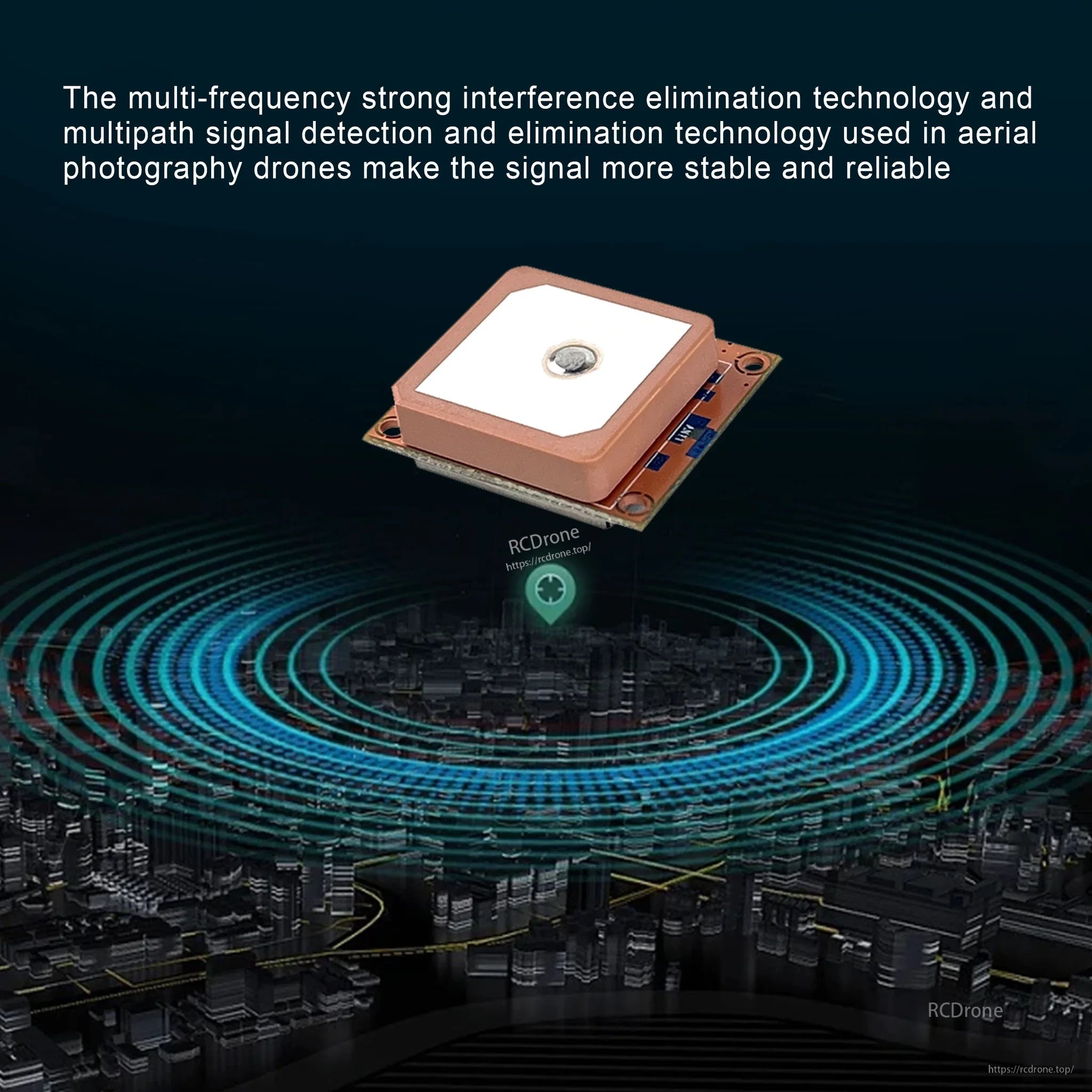
マルチ周波数干渉フィルタリングは、困難なRF環境でのFPVフライトのために、より安定したGPSロックを維持するのに役立ちます。

高利得セラミックパッチアンテナは、飛行中の衛星受信をより一貫してサポートします。


主要な仕様は、UBLOXプロトコル、115200ボー、10Hzの更新を含む迅速なセットアップ計画のためにリストされています。
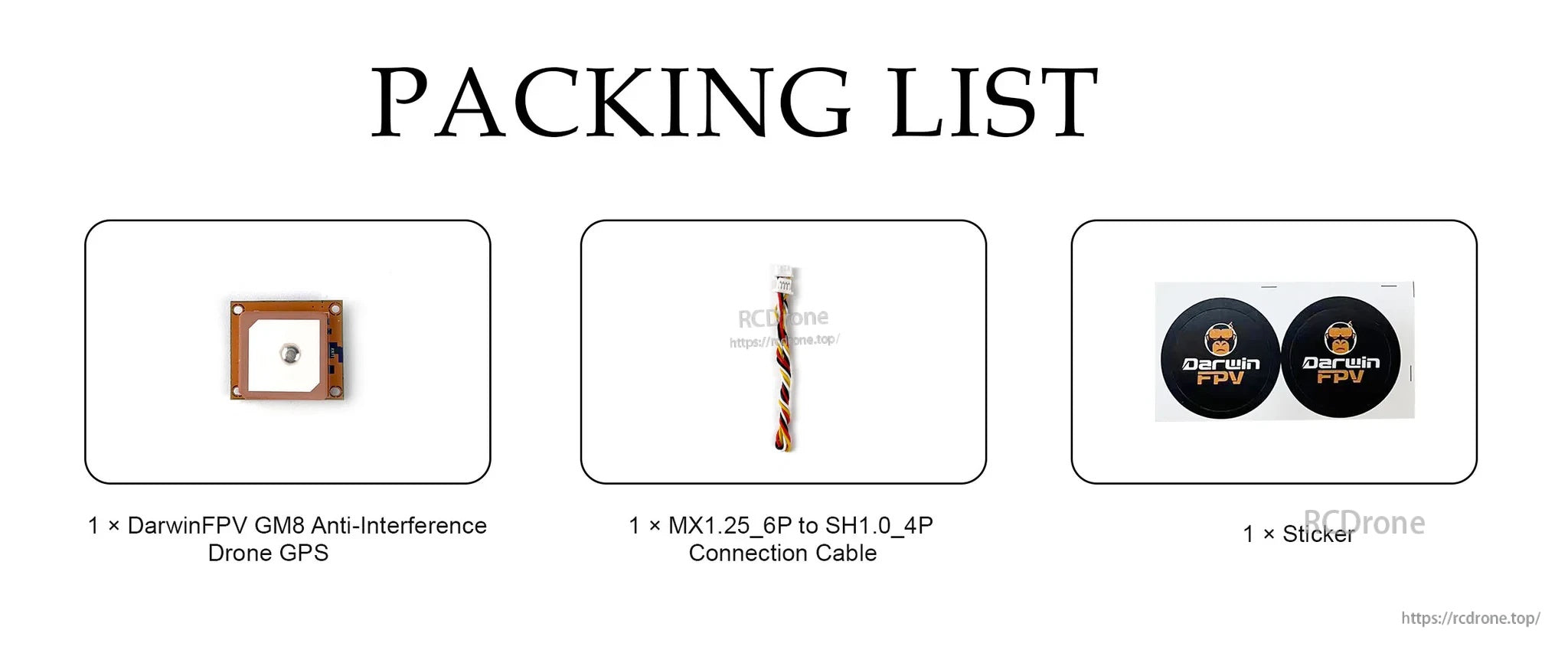
ボックスには、GM8 GPSモジュールと一般的なフライトコントローラーポートに合わせた接続ケーブルが含まれています。
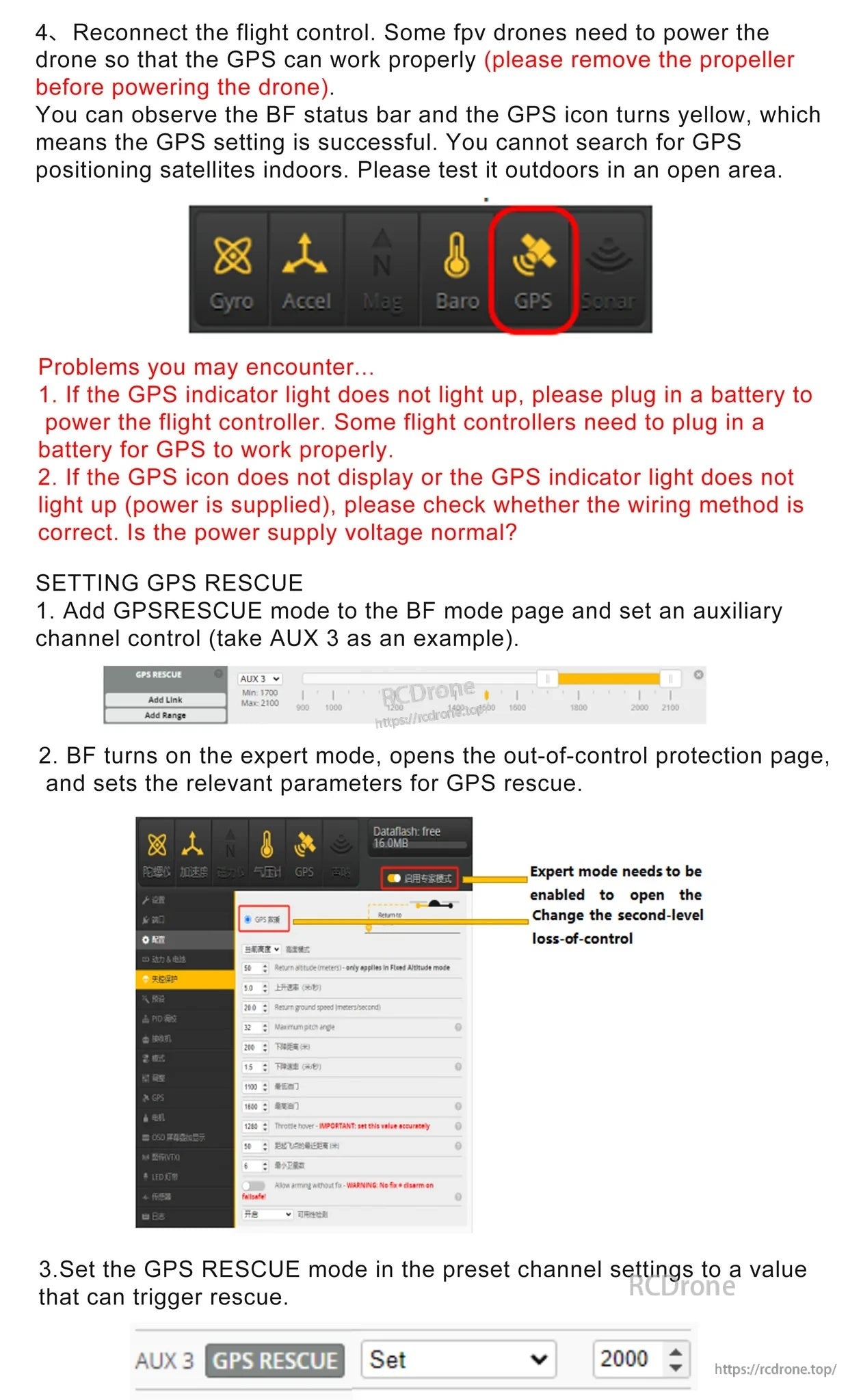
BetaFlightのノートには、モジュールが配線されて検出された後の一般的なトラブルシューティング手順とGPSレスキューのセットアップが含まれています。

Related Collections