




DFRobot SEN0142 MPU6050 6軸ジャイロ加速度センサIMUモジュール I2Cデジタルモーションプロセッサ搭載 Arduino用 & ロボティクス
DFRobot SEN0142 MPU6050 6軸ジャイロ加速度センサIMUモジュール I2Cデジタルモーションプロセッサ搭載 Arduino用 & ロボティクス
DFRobot
受取状況を読み込めませんでした
概要
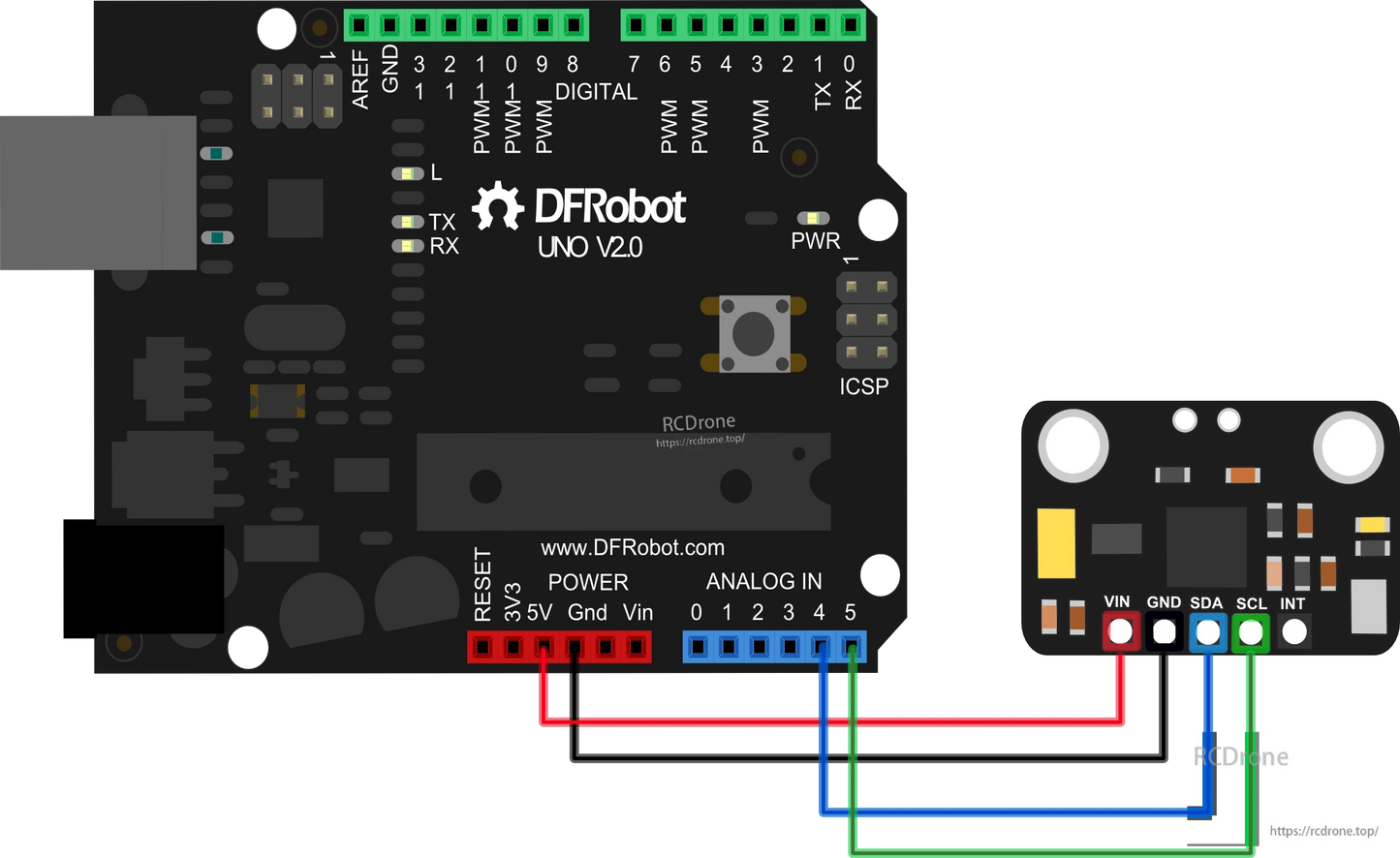
このDFRobot SEN0142 MPU6050 6 DOF IMUモジュールは、3軸ジャイロスコープと3軸加速度計を1つのチップに統合し、ロボティクス、ドローン、ウェアラブルデバイス、Arduinoプロジェクト向けに正確な動作センシングを提供します。デジタルモーションプロセッサ(DMP)を搭載し、高度な6軸および9軸モーションフュージョンアルゴリズムをサポートし、クォータニオン、オイラー角、及び生のセンサーデータ出力を可能にします。入力電圧範囲は広く、3V–5Vで、MPU6050はArduinoや他のマイクロコントローラーに直接接続してリアルタイムの動作追跡やジェスチャー検出が可能です。
主な特徴
-
1つのチップに3軸ジャイロスコープと3軸加速度計を組み合わせています
-
プログラム可能な加速度計の範囲: ±2g, ±4g, ±8g, ±16g
-
ジャイロスコープの感度: ±250, ±500, ±1000, ±2000 dps
-
デジタルモーションプロセッサ (DMP)によるオンボードモーションフュージョンとジェスチャー認識
-
I2Cデジタルインターフェースはマトリックス、クォータニオン、オイラー、及び生データフォーマットをサポートします
-
埋め込みバイアス&およびコンパスキャリブレーションによる精度向上
-
Arduinoおよびウェアラブル電子機器と互換性あり
(I2Cdevlib経由)
仕様
-
動作電圧: 3–5 V
出力: I2Cデジタル(6/9軸モーションフュージョンデータ)
-
加速度計: ±2g / ±4g / ±8g / ±16g プログラム可能範囲
-
ジャイロスコープ: ±250 / ±500 / ±1000 / ±2000 dps 感度
-
データ形式: 回転行列、クォータニオン、オイラー角、生データ
-
寸法: 14 × 21 mm
アプリケーション
-
ロボティクスモーションセンシング
-
Arduino &および DIYエレクトロニクスプロジェクト
-
ヒューマンコンピュータインタラクション(HCI)
-
ウェアラブルデバイスとジェスチャーコントロール
-
ナビゲーションおよびバランシングシステム(e.g., セグウェイタイプの輸送機器)
-
ドローンの安定化と動きの追跡
詳細



サンプルコード
最初にすべてのIMUセンサー用の ライブラリ をダウンロードしてください!




- 選択結果を選ぶと、ページが全面的に更新されます。
- 新しいウィンドウで開きます。