F450-4B Raspberry Pi プログラマブル ドローン開発キット - Pixhawk DIY Ardupilot 産業用オープンソース ドローン プラットフォーム
F450-4B Raspberry Pi プログラマブル ドローン開発キット - Pixhawk DIY Ardupilot 産業用オープンソース ドローン プラットフォーム
RCDrone
受取状況を読み込めませんでした
概要
の F450-4B ラズベリーパイドローン 高度な DIYドローンキット 強力な ラズベリーパイ4B 多機能なオンボードコンピューター Pixhawk 2.4.8 フライトコントローラー高度にカスタマイズ可能で プログラム可能なドローン プラットフォーム。この オープンソースドローンプラットフォーム 最先端のツールをサポート ドローンキット-Python開発者は、自律ミッション、リアルタイムデータ転送、AI を活用した画像処理アプリケーションを作成できます。堅牢な 450mm フレーム、200MP HD カメラ、最大 20 分間の飛行が可能な 3S 5200mAh バッテリー、高度維持、ホーム復帰、旋回モードなどの高度な飛行モードを備えた F450 ドローン キットは、革新的なドローン開発体験を求める愛好家、研究者、教育者にとって理想的な選択肢です。
主な特徴
高性能ハードウェア
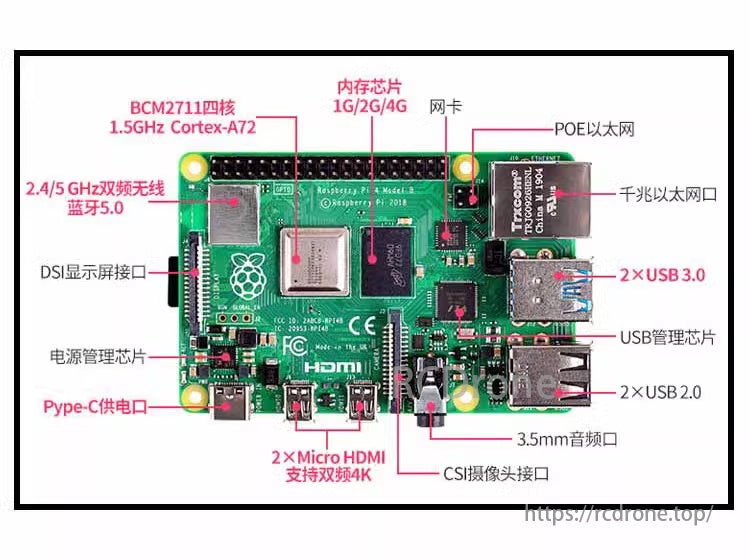
- ラズベリーパイ4B: 64 ビット 1.5GHz クアッドコア プロセッサを搭載し、4K ビデオ出力と高速 WiFi 通信をサポートし、信頼性の高い動作を実現します。
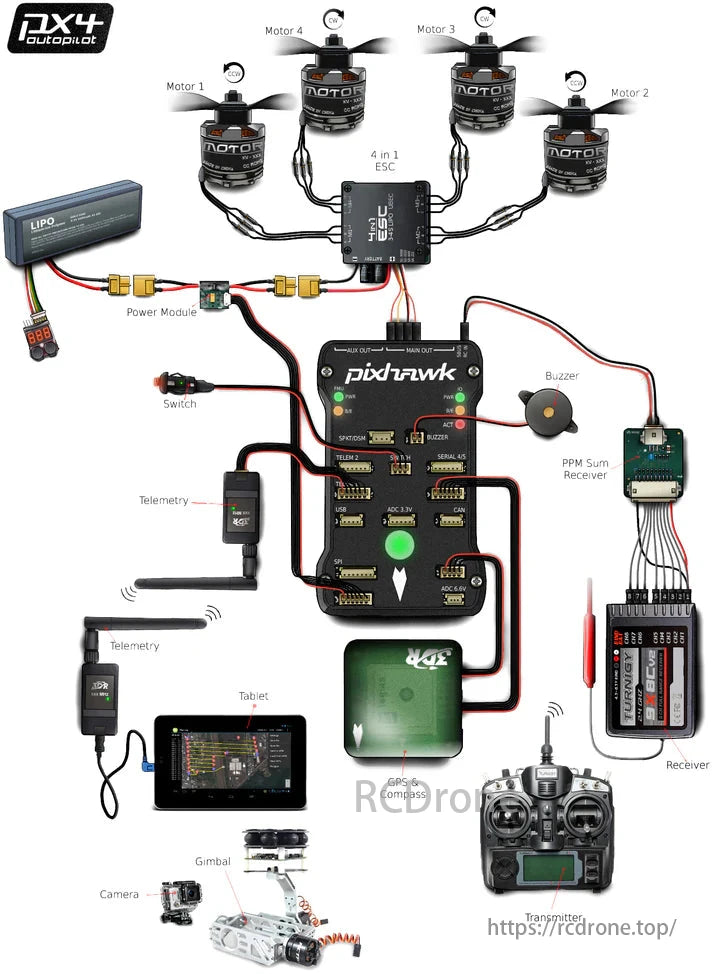
- Pixhawk 2.4.8 フライトコントローラー: 複数の統合センサーを搭載し、正確な姿勢制御、ホバリング、ミッション計画を実現します。
- ビジョン拡張サポート: 単眼カメラと OpenCV ツールを組み合わせたこのキットは、リアルタイムの画像伝送と処理のニーズを満たします。
多様な飛行モード
- 高度保持 (AltHold): 安定した飛行高度を維持します。
- ホバー: 正確な静止ホバリングを実現します。
- ホームに戻る(戻る): 信号が途切れたり、電池残量が少なくなると自動的に出発点に戻ります。
- 着陸(陸): スムーズな自律着陸を実行します。
- 安定化モード: 飛行姿勢を自動で調整します。
- サークルモード: ターゲットの周りを円飛行します。
- ヘッドレスモード: 方向の制約を取り除き、制御を容易にします。
- 制御不能の帰還: 信号が失われたときに、事前に設定した場所に戻ります。
- 低出力着陸: バッテリー残量が少ない状態でも安全に着陸します。
データ伝送と画像処理
- 外部ルーターを必要とせずに内蔵ホットスポットを介してローカル WiFi ネットワークを確立し、リアルタイムのデータと画像の転送を可能にします。
- OpenCV ベースのビデオ ストリーミングと分析をサポートし、画像監視やインテリジェント アプリケーションに最適です。
仕様
ドローンパラメータ
| パラメータ | 詳細 |
|---|---|
| 名前 | F450 ドローンキット |
| ホイールベース | 450mm |
| 重さ | 1493g(バッテリーとRaspberry Pi 4Bを含む) |
| フライトコントローラー | ピクホーク2.4。8 オープンソースのフライトコントローラー |
| オンボードコンピューター | ラズベリーパイ4B |
| カメラ | 200MP HD 1080P |
| ホバリングサポート | オプティカルフローモジュールとレーザー距離センサー |
| GPSモジュール | m8n GPS |
| 飛行時間 | 約20分(環境やミッションによって異なります) |
| バッテリー | 3S 5200mAh (11.1V) |
| 積載容量 | 500グラム |
| 風の抵抗 | レベル3-4 |
| モーター | サニースカイA2212 |
| ESC | Hobbywing 20A ESC (3S-4S LiPo バッテリーをサポート) |
| プロペラ | T1045 セルフロックプロペラ |
| 最大高度 | 2000m(干渉なし) |
| 飛行範囲 | 1000メートル |
| 飛行シナリオ | 屋内 / 屋外 |
Pixhawk 2.4.8 フライトコントローラの仕様
- プロセッサ: 32 ビット ARM STM32F427 Cortex M4、168MHz、256KB RAM
- センサー:
- L3GD20 3軸6DOFジャイロスコープ
- LSM303D 3軸14ビット加速度計/磁力計
- MPU6000 6軸加速度計/磁力計
- MS5611高精度気圧計
- 地上制御の互換性: QGroundControl、ミッションプランナー
- 寸法: 81mm x 47mm x 16mm; 重量: 37g
Raspberry Pi 4B 仕様
- チップセット: ブロードコム BCM2711
- CPU: 64ビット 1.5GHz クアッドコア
- グラフィックプロセッサ: 500MHz ビデオコアVI
- ラム: 4GB DDR4
- インターフェース: USB 3.0 x 2、USB 2.0 x 2
- ビデオ出力: デュアルマイクロHDMIポート、サポート 4K@60Hz
- コミュニケーション: Bluetooth 5.0、WiFi 5 (2.4/5GHz)
- 電源: USBタイプC (5V 3A)
パッケージ内容
構成 1: SunnySky A2212 モーターと FlySky i6 リモートおよびテレメトリ
- 着陸装置付きF450フレーム
- SunnySky A2212 モーター (4 個)
- Hobbywing 20A ESC (4個)
- T1045 セルフロックプロペラ(4組)
- PIX M8n GPSモジュール
- 振動減衰板
- FlySky i6 リモート コントローラー
- 3S 5200mAhバッテリー
- B3バランスチャージャー
- GPSマウント
- FS電圧テレメトリモジュール

含まれるもの: バッテリーストラップ、ナイロンケーブルタイ、木製パッド、3M粘着テープ、ブザー、取り付けツール
アセンブリおよびデバッグのビデオ、関連資料が提供されます。ソース コードについてはカスタマー サービスにお問い合わせください。
構成 2: SunnySky A2212 モーターと Radiolink PRO
- 着陸装置付きF450フレーム
- SunnySky A2212 モーター (4 個)
- Hobbywing 20A ESC (4個)
- 9450 セルフロックプロペラ(3組)
- 写真。M8n GPSモジュールキット
- 振動減衰板
- Radiolink PRO (R9DS 受信機)
- 3S 2200mAh 制御バッテリー
- 3S 5200mAhバッテリー
- B3バランスチャージャー
- GPSマウント

含まれるもの: バッテリーストラップ、ナイロンケーブルタイ、木製パッド、3M粘着テープ、ブザー、取り付けツール
アセンブリおよびデバッグのビデオ、関連資料が提供されます。ソース コードについてはカスタマー サービスにお問い合わせください。
F450 ドローンキットの組み立て
アプリケーションシナリオ
F450-4B ドローン開発キットは次の用途に最適です。
- ドローン研究開発: 大学での研究、フライトコントローラーのテスト、アルゴリズムの開発。
- インテリジェントアプリケーション: 経路計画、ターゲット認識、障害物回避。
- 教育実験: プログラミング、ハードウェアの組み立て、デバッグ。
- フィールドでの使用屋内ホバリング、屋外調査、農業監視など。
詳細
F450-4B Raspberry Pi ドローン開発プラットフォーム
F450 は、シンプルで便利な組み立て、高いコストパフォーマンス、優れた実用性を備え、初心者がすぐにドローン操作を始めるのに適した、定番でよく使われるドローン モデルです。

アップグレードされた Raspberry Pi 4B
Raspberry Pi 4B のハードウェア処理能力は 3B+ よりも大幅に強力です。
Raspberry Piには最新のオープンソースシステムが搭載されています ウブントゥ 20.04Ubuntu Mate システムに比べてよりスムーズなエクスペリエンスを提供します。

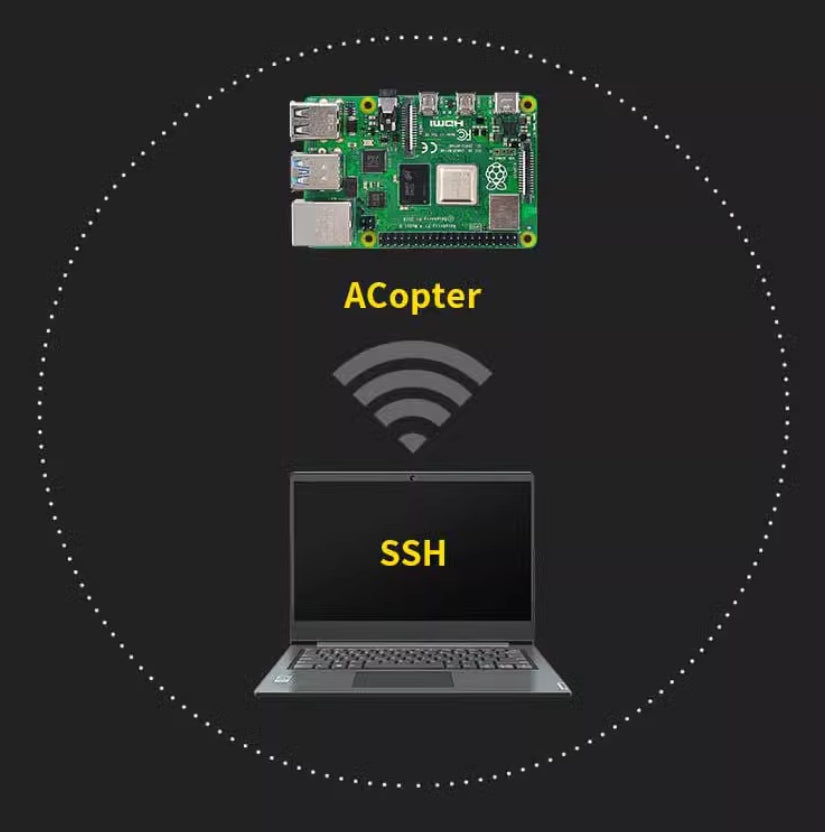
システム対応 WiFi ホットスポット (Acopter)
Raspberry Pi 4B の WiFi 機能を使用して、自作のホットスポット (Acopter) を作成します。PC は 4B の WiFi ホットスポットに直接接続してローカル ネットワークを形成し、SSH コマンドを使用して Raspberry Pi にリモート アクセスできます。ネットワーク構成にルーターが必要な 3B+ モデルとは異なり、このセットアップははるかにシンプルで、初心者にとって使いやすいものになっています。
OpenCV ビジュアル処理
単眼カメラが追加され、画像の転送と後処理が可能になりました。ビデオ ストリームは Raspberry Pi 経由でキャプチャし、OpenCV などのツールを使用して処理できます。リアルタイムの HD ビデオ ストリームは、処理のために PC に送り返したり、表示のためにモバイル デバイスに送り返したりすることもできます。

さらなる拡張インターフェース
Raspberry Pi 4B は、デュアル USB 3.0 ポート、デュアル 4K マイクロ HDMI ポート、CSI および DSI インターフェイス、ギガビット イーサネット、Type-C 電源など、幅広い拡張インターフェイスを提供し、さまざまなアプリケーションに優れた汎用性を提供します。
シングルカメラエディション
シングルカメラ版には、Raspberry Pi 4B と単眼カメラが含まれており、シリアルポート経由でフライトコントローラーと通信できます。視覚処理、Python プログラミング、通信などのタスクをサポートします。このバージョンは、Pixhawk の使用経験があり、Ubuntu (Linux)、OpenCV、Raspberry Pi、ローカルエリアネットワーク通信の基礎知識があるユーザーに適しています。
基本機能に加えて、シングルカメラ版はWiFi経由の画像とデータの送信をサポートし、ドローンの制御を可能にします。 ドローンキット-Python プログラミング。

オプティカルフローポジショニング
オプティカルフローポジショニング条件下での Dronekit-python による屋内ホバリング制御

このドローン開発プラットフォームは ロス、 Pythonプログラミング、 OpenCV画像認識、 4G長距離伝送、 そして Aruco 2Dコード視覚誘導着陸非常に汎用性が高く、革新的です。

FlySky i6 リモート コントローラー
10 チャンネル ファームウェア、電圧テレメトリ モジュールがプリロードされた ia6b 受信機、および 1000 m を超えるリモート コントロール範囲を備えており、初心者が学習して練習するのに最適です。

Radiolink AT9S 送信機
2000m以上の制御範囲を持つ10チャンネルを備えています。バッテリー電圧、GPS衛星数、飛行高度、座標、飛行モードなどのデータを提供するテレメトリモジュールを搭載しています。

よくある質問
1.二次開発はできますか?独自にプログラミングできますか?
答えはイエスです。先ほども紹介したように、Ardupilotは現在最も広く使われているオープンソースの飛行制御システムであり、国内外の優れたドローンモデルの多くがこのシステムをベースに開発されています。
二次開発には主に飛行制御開発と外部拡張の2つの方向があります。
- 飛行制御開発
私たちは Ardupilot を使用しているため、オープンソースの飛行制御開発を学ぶには、主に Ardupilot オープンソース プロジェクトを研究する必要があります。
- 強力なプログラミング スキル (ソース コードは C++ です) に加え、高度な数学 (離散数学、反復、線形化)、カルマン フィルタリング、組み込み開発に関する知識も必要です。
- しっかりとした理論的基礎が必要です。これにより、無人システムの開発と飛行制御の研究開発に取り組む準備が整います。
飛行制御の開発に集中したい場合は、ほとんどの作業をコンピューター上で行う必要があります。
- プログラミング環境の設定、飛行制御ソースコードのダウンロード、アーキテクチャと機能モジュールの調査など。
- コード フレームワークに慣れたら、既存のコードに基づいてプログラミングを開始できます。
基本的な飛行制御モデルから始めて、ガイダンスとして当社が提供する Ardupilot 飛行制御の教科書を参照してください。
- 外部拡張開発
外部拡張により、フライト コントローラーの予約済みインターフェイスを介して、タスクやシナリオに基づいて外部デバイスを追加できます。例:
- 屋内での位置決めとホバリング用のオプティカルフロー モジュールを追加します。
- 障害物回避用のレーザーレーダーを追加します。
- テレメトリを使用して、自律飛行とルート計画を可能にします。
- オンボードコンピューター (Raspberry Pi など) をインストールし、Dronekit-Python または ROS を使用してドローンを制御するためのプログラミングを行います。
オンボード コンピューターを追加する目的は、次のようなより複雑なタスクを処理することです。
- 視覚認識に Raspberry Pi カメラを使用する (OpenCV、YOLO などが必要)。
- 通信プロトコルを組み合わせてドローンの飛行を制御します。
- 飛行データや高解像度のビデオをネットワーク経由で送信します。
これらの機能は、フライトコントローラーだけに頼るだけでは実現できません。
外部展開の検討は主にアプリケーションに焦点を当てており、これは全国のほとんどのコンテストの方向性でもあります。学習後は、視覚認識、ドローンと AI の統合など、インテリジェント ドローンの重要な領域を探索できます。
2. 独立開発の前提条件は何ですか?
ドローンの学習は段階的なプロセスです。ドローン システムは学際的かつ統合的であり、幅広い知識領域が関係します。ドローン開発を学ぶには、次の基礎知識が必要です。
- はんだごて、各種ドライバー、その他の工具の使用に習熟するなど、基本的な実践スキル。
- 電子工学の基礎知識: 電圧、電流、電力、極性、信号などの概念。
- 自動制御の基礎知識:PID制御、フィードバック、デジタル信号、アナログ信号など。
- 基本的なコンピューター スキル: ドライバー、シリアル ポート、ボー レート、ファームウェア バージョン、ソフトウェア バージョン。
- Pixhawk ドローンの基礎知識。
- Ubuntu オペレーティング システムに関する基本的な知識。
- プログラミング言語の熟練度: C++ や Python など。
Respberry PI ドローンの作り方は?
Related Collections