






当社の製品は CE および ROHS 認証に合格しており、そのほとんどが外観特許と実用新案特許を申請しています
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T シリアル制御バスサーボロボット Arduin デュアル軸 Shafe ロボット roborock iRobot ルンバロボット真空サーボ
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T シリアル制御バスサーボロボット Arduin デュアル軸 Shafe ロボット roborock iRobot ルンバロボット真空サーボ
Feetech
通常価格
$21.25 USD
通常価格
セール価格
$21.25 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
仕様
ブランド名: フィーテック
原産地: 中国本土
材質: プラスチック
プラスチックタイプ: PC
RC パーツと付属品: バッテリー - LiPo
サイズ: 10*10*10
車両タイプの場合: 車
使用: 乗り物とリモコンのおもちゃ
アップグレード パーツ/アクセサリ: リチウム バッテリー
リモコン周辺機器/デバイス: リモコン
工具消耗品: バッテリー
数量: 1 個
技術パラメータ: KV1100
型番: SCS225-C006
四輪駆動属性: モーター
ホイールベース: ネジ
型番: SCS225-C006
サイズ: 45.23mm X 24.73mm X 35mm
重量: 55±1g
ギアタイプ: 銅
限界角度: 限界なし
ベアリング: ボールベアリング
ホーンギアスプライン: 25T
モーター: コアレスモーター
動作電圧範囲: 6-7.4V
ピークストールトルク: 19.5kg.cm@6V
定格トルク: 6.5kg.cm@6V
プロトコル タイプ: 半二重非同期シリアル通信
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

ODM および OEM およびカスタム メイドに特化 1. ロゴを印刷または印刷
2. サーボ ワイヤー
3. 梱包: PE バッグ、カラー ボックス、プラスチック ボックス
あなたのロゴ
4.ケーブルコネクタ
5.カスタマイズされたさまざまな広い動作電圧サーボ
2. サーボ ワイヤー
3. 梱包: PE バッグ、カラー ボックス、プラスチック ボックス
あなたのロゴ
4.ケーブルコネクタ
5.カスタマイズされたさまざまな広い動作電圧サーボ
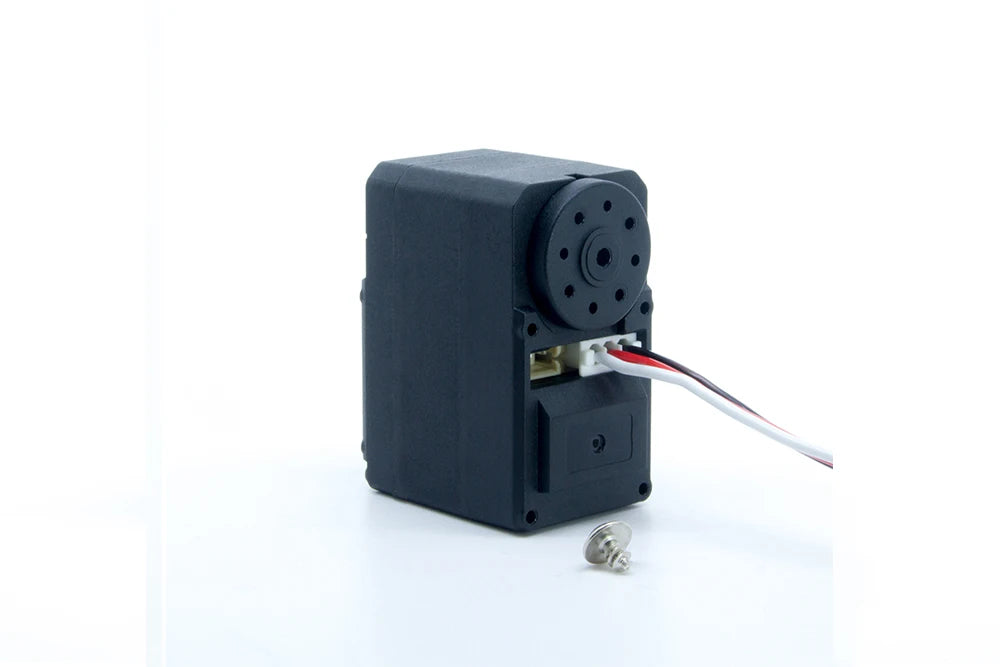
製品の使用法

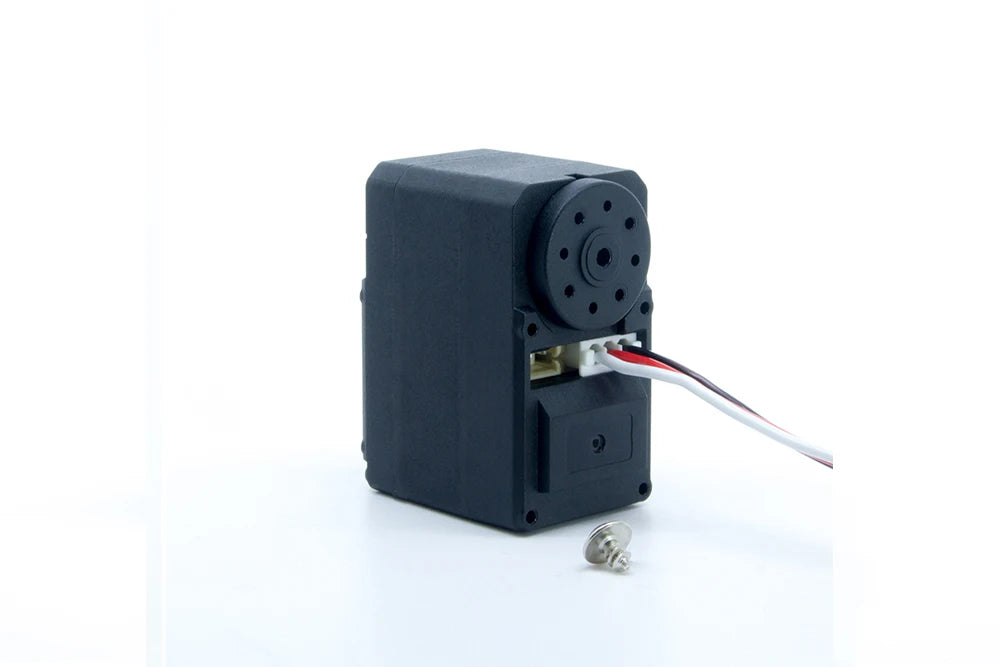
FEETECH 7.4V 20KG.CM プラスチックケースメタルギア磁気エンコーダ両軸 TTL シリアルバスサーボ
詳細画像




詳細画像
FEETECH 7.4V 20KG.CM プラスチックケースメタルギア磁気エンコーダダブルシャフト TTL シリアルバスサーボ
電子制御機能:
1. 加速開始停止機能: 速度と加速値を設定でき、動作効果がより穏やかになります。
2. 高精度、360 度絶対位置 4096 ビット精度、最高位置分解能は 0.088 度、制御が 90 度の場合は 4096 / 360 * 90 = 1024 を入力、制御が 180 度の場合は 4096 / 360 * 180 = 2048 を入力して計算します。 .
3. 4 つの動作モード切り替えがあります (モード 0 位置サーボ、モード 1 速度閉ループ、モード 2 速度開ループ、モード 3 ステップ サーボ)。
1)、モード 0:位置情報モード、デフォルトのモード。このモードでは、360 度の絶対角度制御を実現できます。加速動作をサポートします。
2)、モード 1:速度閉ループ。プログラミング インターフェイスで動作モードが 1 に設定され、速度閉ループ モードに切り替えて、速度列に対応する速度を入力して実行します。 .
3)、モード 2:速度オープンループ。プログラミング インターフェイスで動作モードが 2 に設定され、速度オープンループ モードに切り替えて、実行する時間列に対応する時間を入力します。
4)、モード 3:ステップ モード: プログラミング インターフェイスで、最大/最小角度制限は 0 に設定され、動作モードは 3 に設定されます。ステップ モードに切り替えます。位置バーに位置を入力して、目標位置に向かって進みます。位置をもう一度クリックすると、同じ方向にステップを続けます。
4、マルチターンモード、360 度絶対制御とフィードバック、最高精度では、絶対位置制御はプラスまたはマイナス 7 回転ですが、電源サイクルの回数は保存されず、絶対位置フィードバック値のみが保持されます。
5、ワンキーキャリブレーション、任意の位置に 360 度の角度で設置、(40 (10 進数) アドレス入力 128 (10 進数)) ワンキー補正現在位置は中央 (2048 (10 進数))。
6、TTL 通信レベル、半二重非同期通信、読み取りおよび書き込みパラメーターを調整するためのバス プロトコル サポート、および同期読み取り機能の追加 (バス上の各サーボからの読み取り命令を順番に受信する命令を送信します。)
7、複数の保護 (過負荷、過電流、過電圧、過熱、スイッチ設定、条件パラメータ変更)
1)、過負荷保護: 位置検出による、開始位置から位置への移動中目標位置に対して、障害物に遭遇した後、現在位置が目標位置ではないと検出された場合、アンロード力は 2 秒間持続します (デフォルトのブロック力の 20%)。新しいコマンドがトリガーされるまで、保護を解除します
2)、過電流保護: 設定電流値を通じて、電流が設定電流値に達するかどうかを確認します。設定電流値に達したら力を緩めます(デフォルトトルクは0)。新しいコマンドがトリガーされるまで、保護を解除します
3)、過電圧保護: 現在の電圧値を検出します。設定した電圧値を超えると、アラームが過電圧を表示します。
4)、過熱保護: 現在のモーター温度を検出します。温度が設定値を超えると、アラームに過熱が表示されます。
8:複数のフィードバック:
1) 負荷フィードバック: 電流制御出力はモーターの電圧デューティ サイクルを駆動し、フルスケールは 1000 = 100% トルク出力です。
2) 電流フィードバック: サーボ動作電流、1 = 6.5mA
3) 電圧フィードバック: サーボ動作電圧、70=7V、0.1V
4) 温度フィードバック: 現在のサーボの内部動作温度 (温度を測定)。
5) 速度フィードバック: 現在のモーターの回転速度と単位時間あたりのステップ数 (1 秒あたり) をフィードバックします
9、PIDパラメータを開きます。
1. 加速開始停止機能: 速度と加速値を設定でき、動作効果がより穏やかになります。
2. 高精度、360 度絶対位置 4096 ビット精度、最高位置分解能は 0.088 度、制御が 90 度の場合は 4096 / 360 * 90 = 1024 を入力、制御が 180 度の場合は 4096 / 360 * 180 = 2048 を入力して計算します。 .
3. 4 つの動作モード切り替えがあります (モード 0 位置サーボ、モード 1 速度閉ループ、モード 2 速度開ループ、モード 3 ステップ サーボ)。
1)、モード 0:位置情報モード、デフォルトのモード。このモードでは、360 度の絶対角度制御を実現できます。加速動作をサポートします。
2)、モード 1:速度閉ループ。プログラミング インターフェイスで動作モードが 1 に設定され、速度閉ループ モードに切り替えて、速度列に対応する速度を入力して実行します。 .
3)、モード 2:速度オープンループ。プログラミング インターフェイスで動作モードが 2 に設定され、速度オープンループ モードに切り替えて、実行する時間列に対応する時間を入力します。
4)、モード 3:ステップ モード: プログラミング インターフェイスで、最大/最小角度制限は 0 に設定され、動作モードは 3 に設定されます。ステップ モードに切り替えます。位置バーに位置を入力して、目標位置に向かって進みます。位置をもう一度クリックすると、同じ方向にステップを続けます。
4、マルチターンモード、360 度絶対制御とフィードバック、最高精度では、絶対位置制御はプラスまたはマイナス 7 回転ですが、電源サイクルの回数は保存されず、絶対位置フィードバック値のみが保持されます。
5、ワンキーキャリブレーション、任意の位置に 360 度の角度で設置、(40 (10 進数) アドレス入力 128 (10 進数)) ワンキー補正現在位置は中央 (2048 (10 進数))。
6、TTL 通信レベル、半二重非同期通信、読み取りおよび書き込みパラメーターを調整するためのバス プロトコル サポート、および同期読み取り機能の追加 (バス上の各サーボからの読み取り命令を順番に受信する命令を送信します。)
7、複数の保護 (過負荷、過電流、過電圧、過熱、スイッチ設定、条件パラメータ変更)
1)、過負荷保護: 位置検出による、開始位置から位置への移動中目標位置に対して、障害物に遭遇した後、現在位置が目標位置ではないと検出された場合、アンロード力は 2 秒間持続します (デフォルトのブロック力の 20%)。新しいコマンドがトリガーされるまで、保護を解除します
2)、過電流保護: 設定電流値を通じて、電流が設定電流値に達するかどうかを確認します。設定電流値に達したら力を緩めます(デフォルトトルクは0)。新しいコマンドがトリガーされるまで、保護を解除します
3)、過電圧保護: 現在の電圧値を検出します。設定した電圧値を超えると、アラームが過電圧を表示します。
4)、過熱保護: 現在のモーター温度を検出します。温度が設定値を超えると、アラームに過熱が表示されます。
8:複数のフィードバック:
1) 負荷フィードバック: 電流制御出力はモーターの電圧デューティ サイクルを駆動し、フルスケールは 1000 = 100% トルク出力です。
2) 電流フィードバック: サーボ動作電流、1 = 6.5mA
3) 電圧フィードバック: サーボ動作電圧、70=7V、0.1V
4) 温度フィードバック: 現在のサーボの内部動作温度 (温度を測定)。
5) 速度フィードバック: 現在のモーターの回転速度と単位時間あたりのステップ数 (1 秒あたり) をフィードバックします
9、PIDパラメータを開きます。
Related Collections






