


高トルク HTDW-5047 高トルクモーターモジュール 50mm 12-48V 14ビットエンコーダー 9/20/36比
高トルク HTDW-5047 高トルクモーターモジュール 50mm 12-48V 14ビットエンコーダー 9/20/36比
HIGH TORQUE
通常価格
$280.80 USD
通常価格
セール価格
$280.80 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
この高トルク HTDW-5047モーターは、3つの減速比(9 / 20 / 36)で提供されるコンパクトな高トルクモジュールシリーズです。14ビットの入出力エンコーダ解像度、12-48Vの電圧範囲、そしてモーションコントロールおよびロボティクスジョイント用の3kHz制御周波数を特徴としています。
主な特徴
- モデル: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- 低バックラッシュ: <10 アークミニット
- 繰り返し位置決め精度: <12 アークミニット; 絶対位置決め精度: <15 アークミニット
- エンコーダ解像度: 14ビット(入力)および14ビット(出力)
- ボーレート: 5 Mbps; 応答時間: ≤200 μs
仕様
| パラメータ | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| 長さと幅 | 50mm | 50mm | 50mm |
| 高さ | 47.4mm | 47.4mm | 47mm |
| 重量 | 300g | 322g | 321g |
| バックラッシュ | <10 アーク分 | <10 アーク分 | <10 アーク分 |
| 繰り返し位置決め精度 | <12 アーク分 | <12 アーク分 | <12 アーク分 |
| 絶対位置決め精度 | <15 アーク分 | <15 アーク分 | <15 アーク分 |
| トルク定数 | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| 極対数 | 14 | 14 | 14 |
| 減速比 | 9 | 20 | 36 |
| ロックロータートルク | 6 Nm | 12 Nm | 21 Nm |
| 無負荷RPM | 260 RPM | 130 RPM | 60 RPM |
| 定格トルク | 1 Nm | 2 Nm | 4 Nm |
| 定格RPM | 170 RPM | 110 RPM | 40 RPM |
| 定格 | 18 W | 23 W | 17 W |
| 電圧範囲 | 12-48V | 12-48V | 12-48V |
| ピーク電流 | 10 A | 10 A | 10 A |
| 速度制御精度 | ±8% | ±15% | ±15% |
| 入力エンコーダ解像度 | 14ビット | 14ビット | 14ビット |
| ボーレート | 5 Mbps | 5 Mbps | 5 Mbps |
| 定格電流 | 2 A | 2 A | 2 A |
| 制御精度 | ±10% | ±15% | ±15% |
| 応答時間 | ≤200 μs | ≤200 μs | ≤200 μs |
| 出力エンコーダ解像度 | 14ビット | 14ビット | 14ビット |
| 制御周波数 | 3 kHz | 3 kHz | 3 kHz |
選択ガイダンスとアフターサポートについては、[email protected] orに連絡し、 https://rcdrone.top/. をご覧ください。
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
マニュアル
- HTDW-5047-9-NE 高トルクモーター デバッグアシスタント ユーザーマニュアル (PDF)
- HTDW-5047-20-NE 高トルクモーター デバッグアシスタント ユーザーマニュアル (PDF)
- HTDW-5047-36-NE 高トルクモーター デバッグアシスタント ユーザーマニュアル (PDF)
- HTDW-5047-9-NE デバッグマニュアル (PDF)
- HTDW-5047-20-NE デバッグマニュアル (PDF)
- HTDW-5047-36-NE デバッグマニュアル (PDF)
- HTDW-5047-9-NE 1.2 fdcan プロトコル分析 (PDF)
- HTDW-5047-20-NE 1.2 fdcan プロトコル分析 (PDF)
- HTDW-5047-36-NE 1.2 fdcanプロトコル分析 (PDF)
- HTDW-5047-9-NEモーター3Dモデル (STP, ZIP)
- HTDW-5047-20-NEモーター3Dモデル (STP, ZIP)
- HTDW-5047-36-NEモーター3Dモデル (STP, ZIP)
- HTDW-5047ユーザーマニュアル (PDF)
詳細

HTDW-5047シリーズは、コンパクトな50mmフォームファクターと高トルクを組み合わせ、ロボティクスのジョイントとモーションコントロールに最適です。
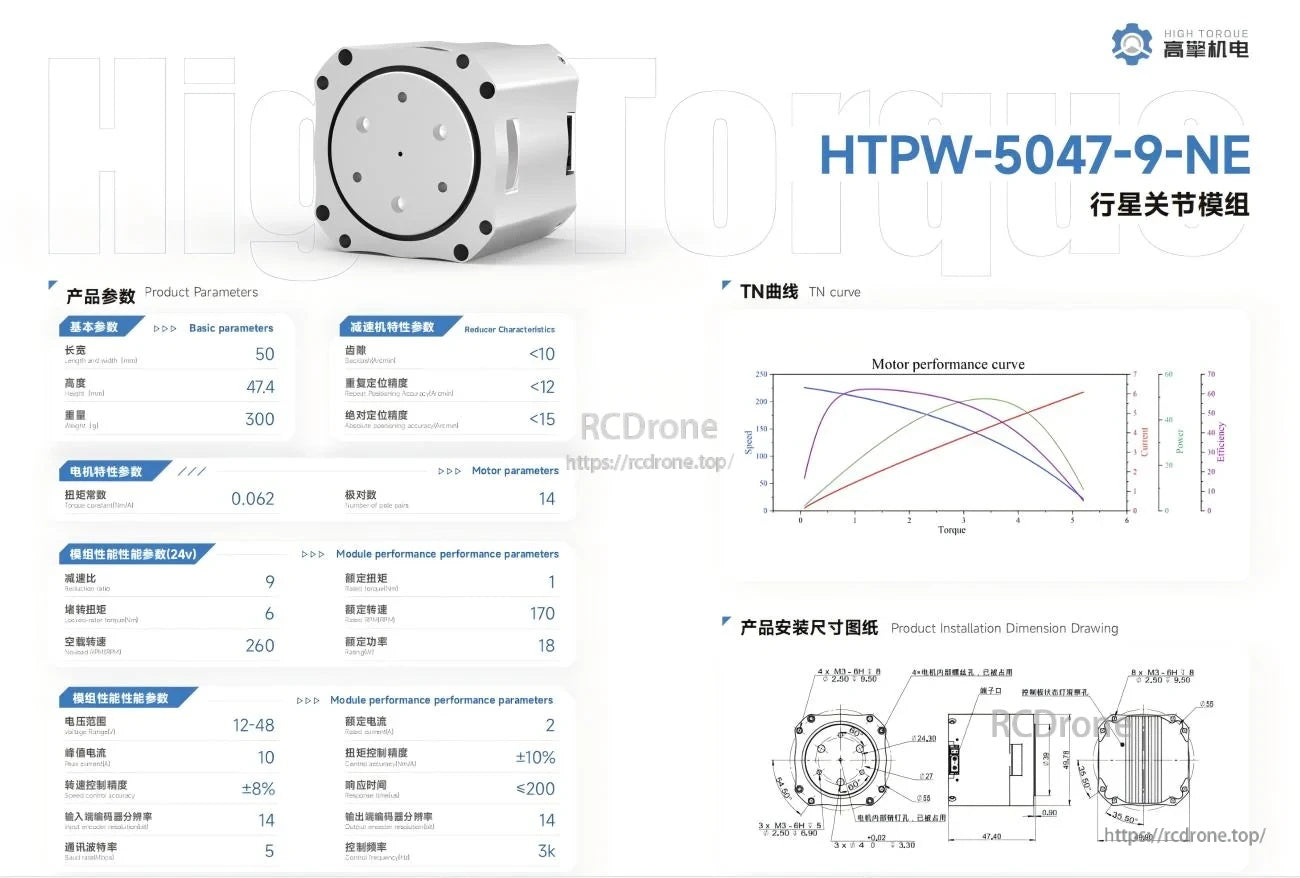
同じモジュールフットプリントを維持しながら、高速が優先される場合は9:1減速バージョンを選択してください。
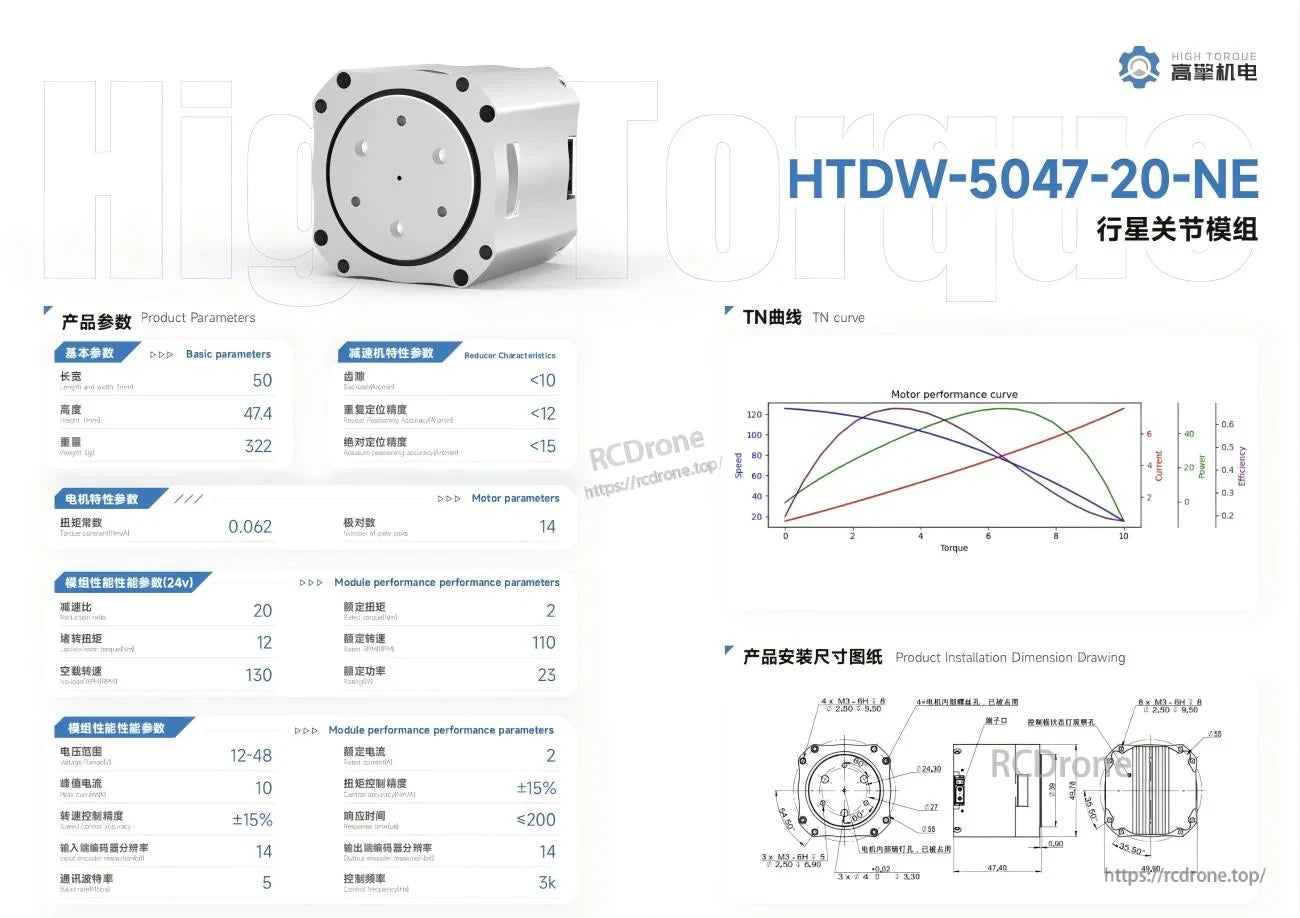
20:1減速オプションは、一般的なロボットジョイントとアクチュエーターのために速度とトルクのバランスを取ります。
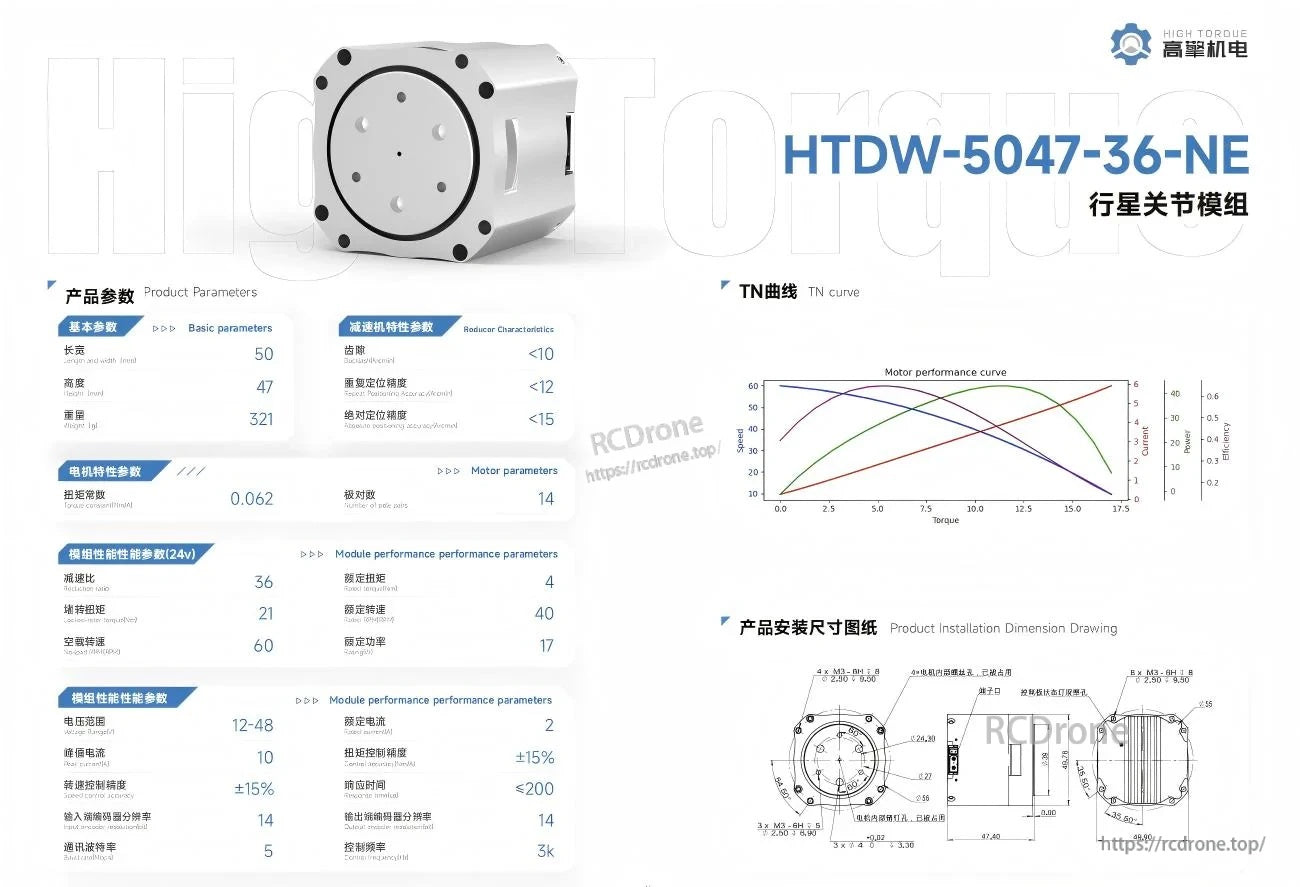
36:1減速バリアントは、低速で高トルクのジョイントに適しており、精密な位置決めが重要です。
Related Collections


