

高トルク HTDW-6056-36-NE-JC モーター(クロスローラーバージョン)、36比率、定格10Nm、12-48V
高トルク HTDW-6056-36-NE-JC モーター(クロスローラーバージョン)、36比率、定格10Nm、12-48V
HIGH TORQUE
通常価格
$362.00 USD
通常価格
セール価格
$362.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
この高トルク HTDW-6056-36-NE-JC モーターは、36の減速比を持つ高トルクモジュールで、クロスローラー構造を特徴としています。12-48Vの動作が指定されており、14ビットの入出力エンコーダ解像度を持ち、精密な低速・高トルクのアクチュエーションのために設計されています。
主な特徴
- モデル: HTDW-6056-36-NE-JC(製品アートワークではHTDW-6056-36-JCとも表示されています)
- クロスローラー版
- 低バックラッシュ: <10アーク分
- エンコーダ解像度: 14ビット(入力)、14ビット(出力)
- 制御周波数: 3kHz
- 高速応答時間: ≤200μs
仕様
| 長さと幅 | 60mm |
| 高さ | 56mm |
| 重量 | 570g |
| バックラッシュ | <10アーク分 |
| 繰り返し位置決め精度 | <12アーク分 |
| 絶対位置決め精度 | <15アーク分 |
| トルク定数 | / |
| 極対数 | 14 |
| 減速比 | 36 |
| ロックローター トルク | 36Nm |
| 無負荷 RPM | 60RPM |
| 定格トルク | 10Nm |
| 定格 RPM | 50RPM |
| 定格 | 52W |
| 電圧範囲 | 12-48V |
| ピーク電流 | 10A |
| 速度制御精度 | ±10% |
| 入力エンコーダ解像度 | 14ビット |
| ボーレート | 5Mbps |
| 定格電流 | 3A |
| 制御精度 | ±20% |
| 応答時間 | ≤200us |
| 出力エンコーダ解像度 | 14ビット |
| 制御周波数 | 3kHz |
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
統合サポートおよび販売前の質問については、[email protected] orに連絡してください。https://rcdrone.top/.
マニュアル & ダウンロード
- 高トルクモーター デバッグアシスタント ユーザーマニュアル (PDF)
- デバッグマニュアル (PDF)
- 1.2 fdcan プロトコル分析 (PDF)
- ユーザーマニュアル (PDF)
- HTDW-6056-36-NE-JC 3Dモデル (ZIP内のSTP)
詳細

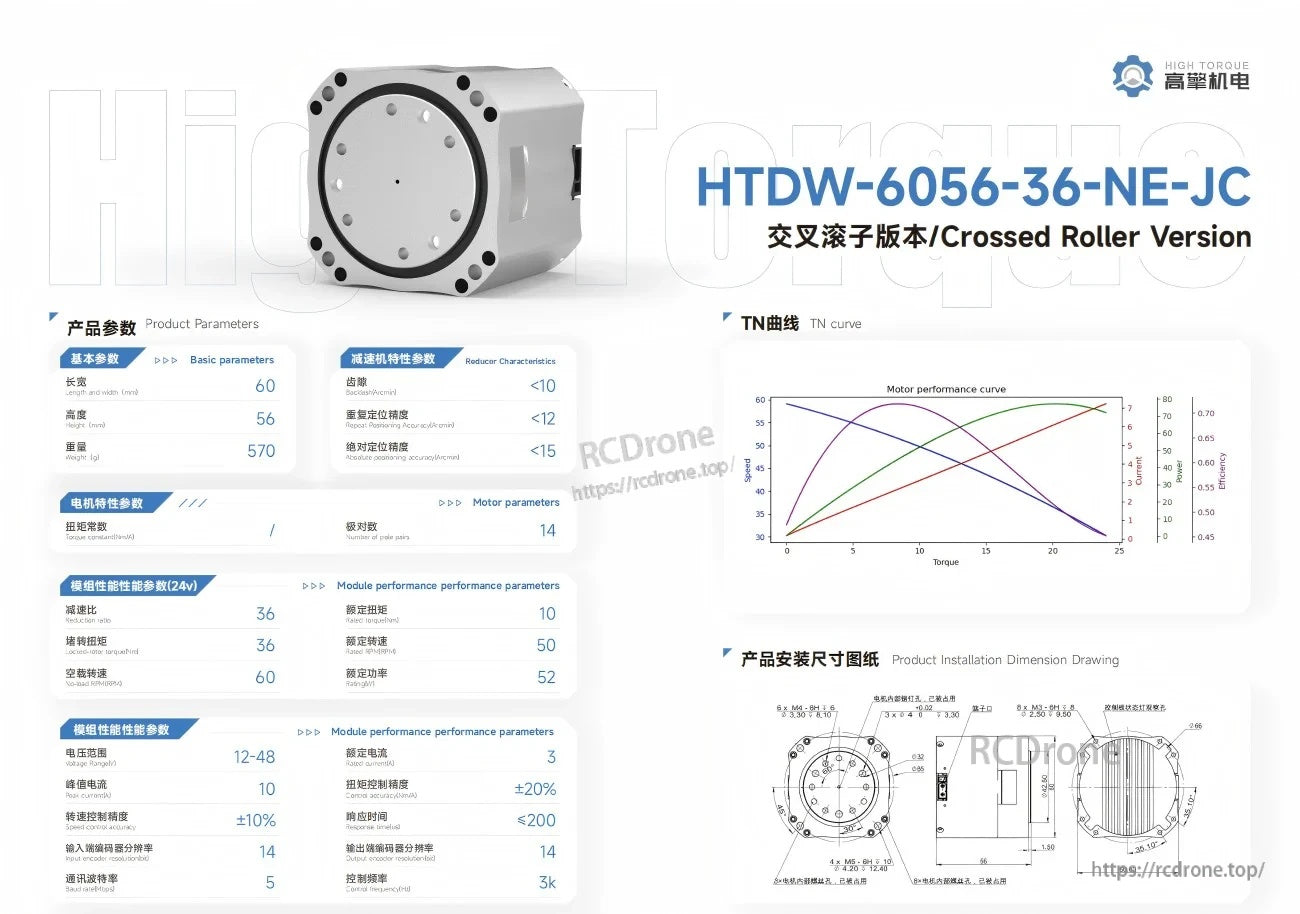
クロスローラー版の詳細なパラメータと取り付け寸法は、統合前にフィットとパフォーマンスを確認するのに役立ちます。
Related Collections

