

高トルク HTDW-6056-36-NE モーターモジュール、36:1 減速、定格10Nm、12-48V、14ビットエンコーダ
高トルク HTDW-6056-36-NE モーターモジュール、36:1 減速、定格10Nm、12-48V、14ビットエンコーダ
HIGH TORQUE
通常価格
$335.40 USD
通常価格
セール価格
$335.40 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
この高トルク HTDW-6056-36-NEモーターは、36の減速比を持つ高トルクモジュールで、制御された低速出力を必要とするロボティクスのジョイントおよびアクチュエータアプリケーション向けに設計されています。主要な動作パラメータには、12-48Vの入力、50RPMでの10Nmの定格トルク、および36Nmのロックロータートルクが含まれます。
主な特徴
- モデルマーク: HTDW-6056 / HTDW-6056-36-NE
- 減速比: 36
- バックラッシュと位置決め性能: バックラッシュ <10Arcmin; 繰り返し位置決め精度 <12Arcmin; 絶対位置決め精度 <15Arcmin
- エンコーダ解像度: 入力エンコーダ 14ビット; 出力エンコーダ 14ビット
- 制御/通信パラメータ: ボーレート 5Mbps; 制御周波数 3kHz; 応答時間 ≤200us
仕様
| 長さと幅 | 60mm |
| 高さ | 56mm |
| 重量 | 565g |
| バックラッシュ | <10Arcmin |
| 繰り返し位置決め精度 | <12Arcmin |
| 絶対位置決め精度 | <15Arcmin |
| トルク定数 | / |
| 極対数 | 14 |
| 減速比 | 36 |
| ロックロータートルク | 36Nm |
| 無負荷RPM | 60RPM |
| 定格トルク | 10Nm |
| 定格RPM | 50RPM |
| 定格 | 52W |
| 電圧範囲 | 12-48V |
| ピーク電流 | 10A |
| 速度制御精度 | ±10% |
| 入力エンコーダ解像度 | 14ビット |
| ボーレート | 5Mbps |
| 定格電流 | 3A |
| 制御精度 | ±20% |
| 応答時間 | ≤200us |
| 出力エンコーダ解像度 | 14ビット |
| 制御周波数 | 3kHz |
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
統合に関する質問や販売前の確認については、サポートに連絡してください https://rcdrone.top/ またはメール [email protected] .
マニュアル
- 高トルクモーター デバッグアシスタント ユーザーマニュアル (PDF)
- デバッグマニュアル (PDF)
- 1.2 FDCANプロトコル分析 (PDF)
- ユーザーマニュアル (PDF)
- HTDW-6056-36-NE 製品構造図 (PDF)
- 高トルク HTDW-6056-36-NE モーター 3Dモデル (STP)
詳細

制御された低速ロボティックアクチュエーター出力のために構築されたコンパクトな高トルクジョイントモジュール。
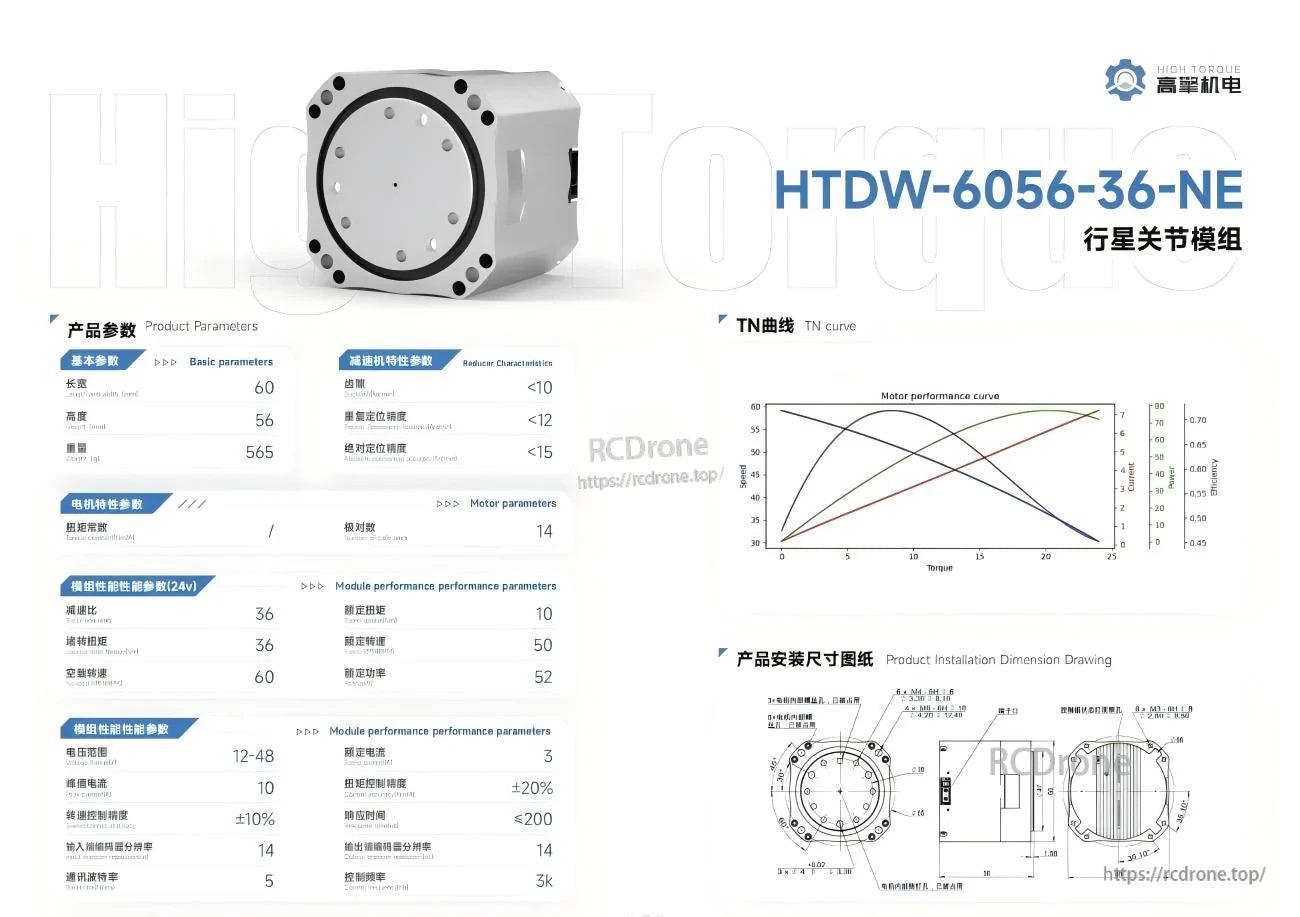
主要仕様、トルク-速度曲線、および取り付け寸法が統合され、機械的統合が迅速化されています。
Related Collections

