Holybro DroneCAN M8N GPS モジュール - STM32G4 プロセッサー BMM150 コンパス 3GNSS サポート DroneCAN プロトコル
Holybro DroneCAN M8N GPS モジュール - STM32G4 プロセッサー BMM150 コンパス 3GNSS サポート DroneCAN プロトコル
HolyBro
通常価格
$98.00 USD
通常価格
セール価格
$98.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
説明
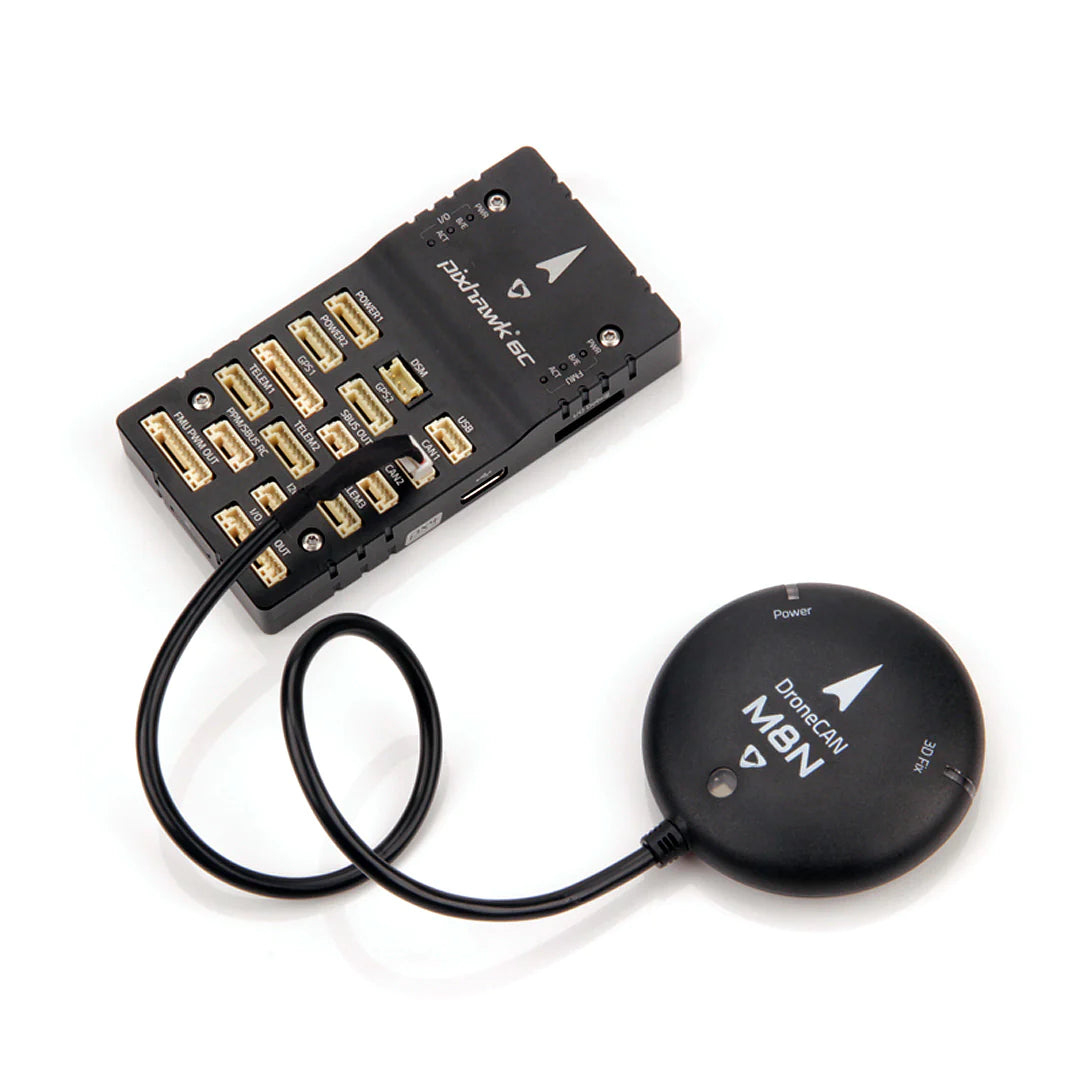
Holybro DroneCAN GPS には、UBLOX M8N または M9N モジュール、BMM150 コンパス、3 色の LED インジケーターが搭載されています。 STM32G4 プロセッサを搭載し、通信に DroneCAN プロトコルを採用しているため、シリアル接続と比較して信頼性が高く、電磁干渉への対処が優れています。フライト コントローラーのシリアル ポートを占有せず、CAN スプリッター ボードを介して異なる CAN デバイスを同じ CAN バスに接続できます。
仕様:
| DroneCAN M8N | |
| GNSS 受信機 | ユーブロックス NEO M8N |
| 同時 GNSS の数 | 最大 3 つの GNSS (GPS、Galileo、GLONASS、BeiDou) |
| プロセッサ | STM32G4 (170MHz、512K フラッシュ) |
| コンパス | BMM150 |
| 周波数帯域 | GPS: L1C/A GLONASS: L10F 北斗: B1I ガリレオ: E1B/C |
| GNSS 補強システム | SBAS: WAAS、EGNOS、MSAS、QZSS |
| ナビゲーション更新 | 5Hz デフォルト(10Hz 最大) |
| 精度 | 2.5m |
| 速度精度 | 0.05 m/s |
| 衛星の最大数 | 22+ |
| 通信プロトコル | DroneCAN @ 1 Mbit/s |
| オートパイロット FW をサポート | PX4、Ardupilot |
| ポートタイプ | GHR-04V-S |
| アンテナ | 25 x 25 x 4 mm セラミック パッチ アンテナ |
| 消費電力 | 5V で 200mA 未満 |
| 電圧 | 4.7-5.2V |
| 動作温度 | -40~80℃ |
| サイズ | 直径:54mm 厚さ:14.5mm |
| 重量 | 36g |
| ケーブル長 | 26cm |
| その他の注意事項 | - LNA MAX2659ELT+ RF アンプ - 再充電可能なファラ容量 - 低ノイズ 3.3V レギュレータ |
その他の技術情報については、https://docs.holybro.com/ をご覧ください。
ドローンCAN
DroneCAN は、ArduPilot および PX4 プロジェクトが CAN 周辺機器と通信するために使用する主要な CAN プロトコルです。これは、オープンな通信、仕様、および複数のオープンな実装を備えたオープン プロトコルです。
DroneCAN 開発
DroneCAN プロジェクトには活発な開発コミュニティがあります。
- Discord でのディスカッション: https://dronecan.org/discord
- github での開発 (https://github.com/DroneCAN )
Related Collections