





Holybro Pix32 v6 フライト コントローラー - ベース STM32H743 FC モジュール標準セット M8N/M9N/M10 GPS 付きミニセット
Holybro Pix32 v6 フライト コントローラー - ベース STM32H743 FC モジュール標準セット M8N/M9N/M10 GPS 付きミニセット
HolyBro
受取状況を読み込めませんでした
Pix32 v6 は、pix32 v5 フライト コントローラーの最新アップデートです。 Pixhawk 6C の亜種です。これは、100 ピン コネクタで接続された別個のフライト コントローラーとキャリア ボードで構成されています。これは、高出力、柔軟でカスタマイズ可能な飛行制御システムを必要とするパイロット向けに設計されています。
Pix32 v6 には、STMicroelectronics® ベースの STM32H743 が搭載されており、Bosch® および InvenSense® のセンサー技術と組み合わせて、学術用途と商業用途の両方に適した、あらゆる自動運転車の制御に柔軟性と信頼性を提供します。
Pix32 v6 の H7 マイクロコントローラーには、最大 480 MHz で動作する Arm® Cortex®-M7 コアが搭載されており、2MB フラッシュ メモリと 1MB RAM を備えています。更新された処理能力のおかげで、開発者は開発作業の生産性と効率性を高めることができ、複雑なアルゴリズムやモデルを使用できるようになります。高性能、低ノイズの IMU が搭載されており、IMU の冗長性を備えながらコスト効率が高いように設計されています。高周波振動を除去し、ノイズを低減して正確な測定値を保証する防振システムにより、車両の全体的な飛行パフォーマンスが向上します。
このフライト コントローラーは、手頃な価格のモジュール式飛行を探している人に最適です。カスタマイズされたベースボードを使用できるコントローラー。 pix32 v6 ベース ボードの回路図を公開しました。カスタム キャリア ボードを自分で作成することも、私たちにお手伝いしてもらうこともできます。カスタマイズされたベースボードを使用すると、物理的なサイズ、ピン配置、および配電要件が車両に完全に一致していることを確認でき、必要なすべての接続が確保され、不要なコネクタの費用や大量の費用が発生しないことが保証されます。
主要な設計ポイント:
- より多くの演算能力と RAM を備えた高性能 STM32H743 プロセッサ
- 薄型フォームファクタを備えた新しいコスト効率の高い設計
- 新しく設計された統合防振システムにより、高周波振動を除去し、ノイズを低減して正確な測定値を保証します
- IMU はオンボード加熱抵抗器によって温度制御され、IMU の最適な動作温度が可能
注:
- パワーモジュール比較表
- M10 GPS が必要PX4 1.14、ArduPilot 4.3 以降が必要です。 (2023 年 9 月 7 日の時点で、PX4 は 1.14 RC1 (リリース候補) をリリースしました。最新のリリースの詳細については、このリンクを確認してください。RC リリースをフラッシュする方法の詳細については、こちらをご覧ください。)
提供されているリファレンス デザイン ファイルを使用して、独自のカスタム ベースボードを簡単に設計できます。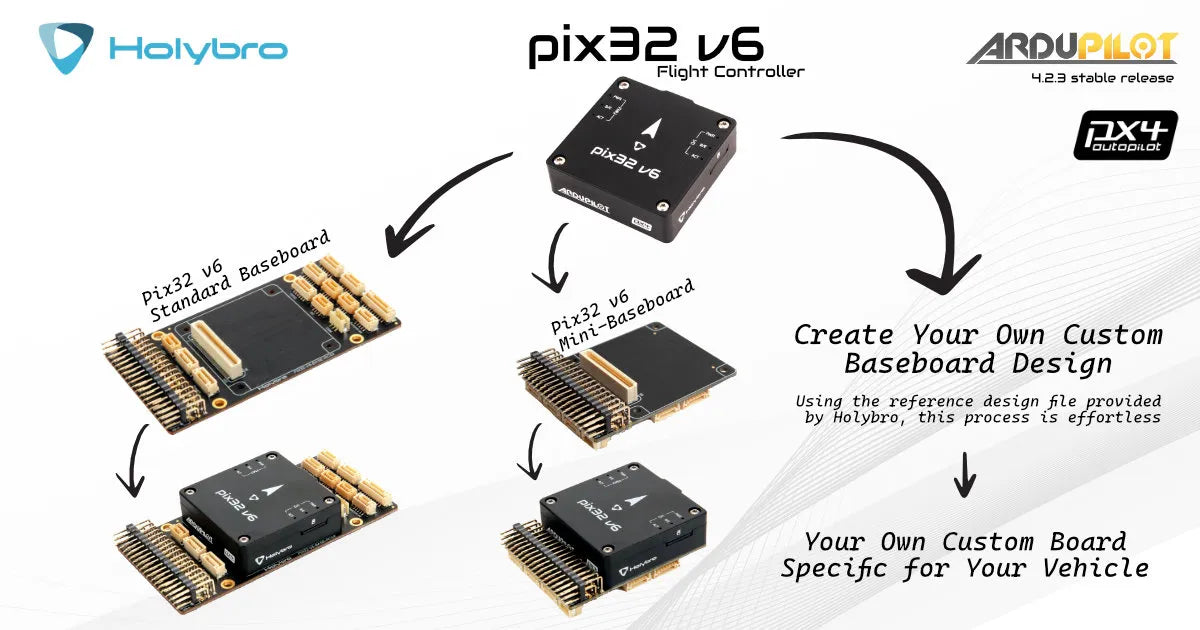
SKU20190/20192 内容:
- Pix32 v6 フライト コントローラー モジュール
- 標準ベースボード / ミニベースボード
- PM02 V3 12S 電源モジュール
- 標準ケーブルセット
SKU20191/SKU20193 含まれるもの:
- Pix32 v6 フライト コントローラー モジュール
- 標準ベースボード / ミニベースボード
- PM02 V3 12S 電源モジュール
- ミニケーブルセット
- M8N GPS / M9N GPS / M10 GPS
注:Pix32v6 標準セットは追って通知があるまで Pix32v5 ベースボードとともに出荷されます。ベースボードに関する追加情報については、ここを参照してください。
Related Collections












