Holybro Pixhawk 4 オートパイロット フライト コントローラー
Holybro Pixhawk 4 オートパイロット フライト コントローラー
HolyBro
受取状況を読み込めませんでした
Pixhawk® 4 は、STMicroelectronics® の高度なプロセッサ テクノロジー、Bosch®、InvenSense® のセンサー テクノロジー、NuttX リアルタイム オペレーティング システムを備えており、あらゆる自律走行車の制御に驚異的なパフォーマンス、柔軟性、信頼性を提供します。
Pixhawk 4 のマイクロコントローラには、2MB のフラッシュ メモリと 512KB の RAM が搭載されています。電力と RAM リソースが増大したため、開発者は開発作業の生産性と効率性を高めることができます。より複雑なアルゴリズムとモデルを自動操縦装置に実装できます。
搭載されている高性能で低ノイズの IMU は、安定化アプリケーション向けに設計されています。すべてのセンサーからのデータ準備完了信号は、自動操縦装置の個別の割り込みピンとタイマー キャプチャ ピンにルーティングされ、センサー データの正確なタイムスタンプが可能になります。新しく設計された振動絶縁により、より正確な読み取りが可能になり、機体の全体的な飛行性能が向上します。
2 つの外部 SPI バスと 6 つの関連するチップ選択ラインにより、追加のセンサーと SPI インターフェイス ペイロードを追加できます。合計 4 つの I2C バスがあり、そのうち 2 つは外部専用で、残りの 2 つは GPS/コンパス モジュール用のシリアル ポートとグループ化されています。
注記:
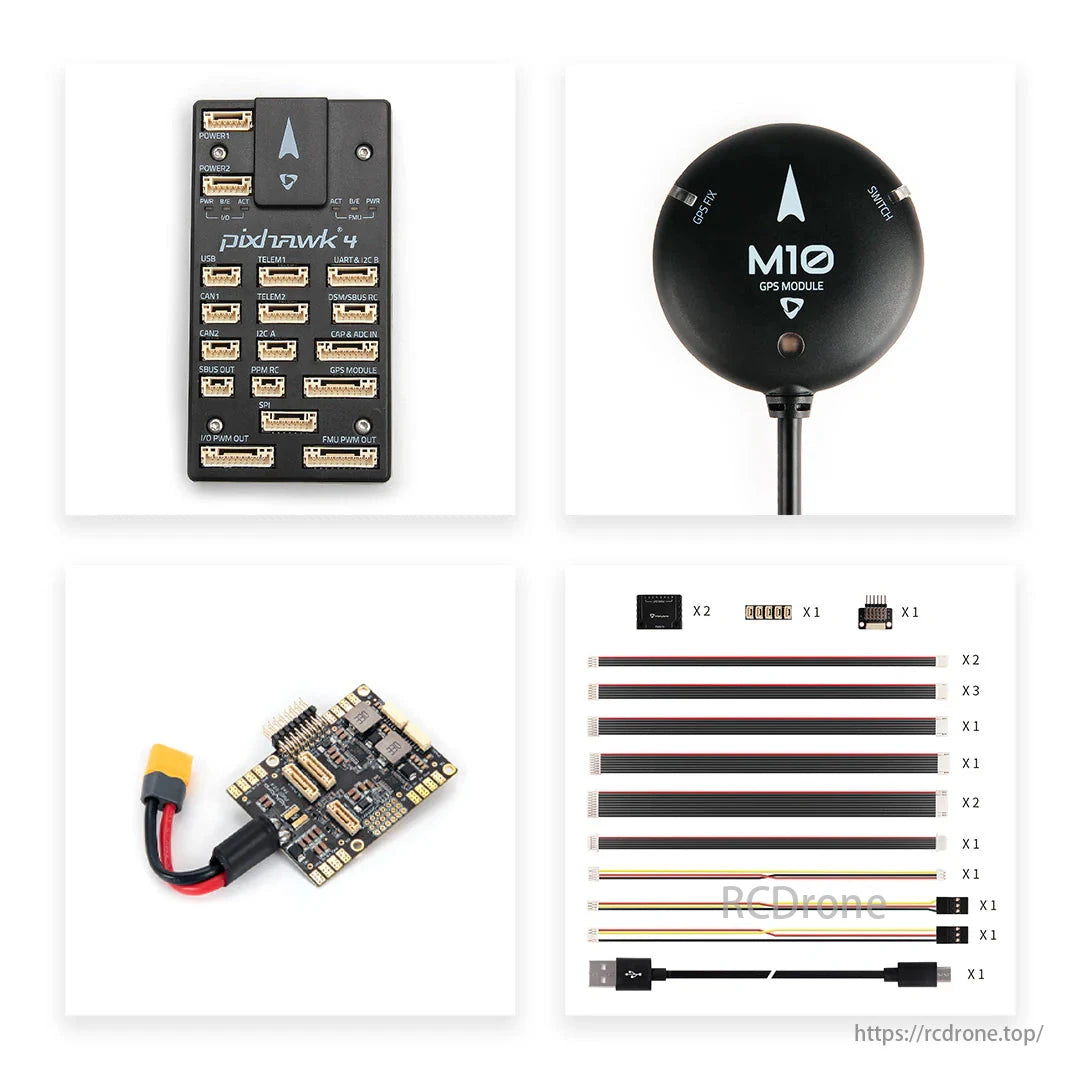
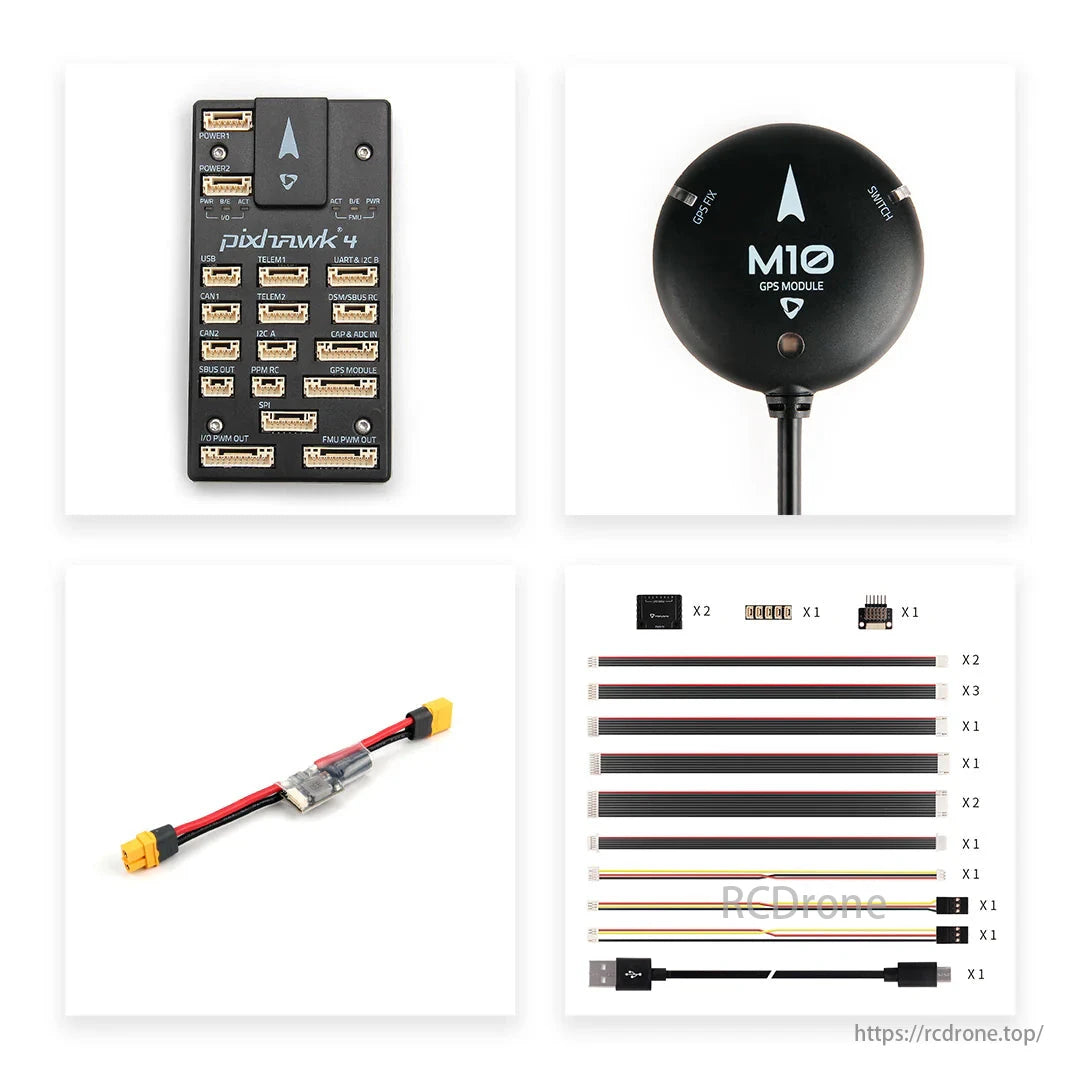
- M10 GPSの要件 PX4 1.14 および ArduPilot 4.3 以降。
- パワーモジュール比較表
技術仕様
- メインFMUプロセッサ
- STM32F765 - 32 ビット Arm® Cortex® -M7、216MHz、2MB メモリ、512KB RAM
- STM32F765 - 32 ビット Arm® Cortex® -M7、216MHz、2MB メモリ、512KB RAM
- IOプロセッサ
- STM32F103 - 32 ビット Arm® Cortex®-M3、72MHz、64KB SRAM (現在)
- STM32F100 - 32 ビット Arm® Cortex® -M3、24MHz、8KB SRAM (製造中止)
- 搭載センサー
- アクセル/ジャイロ: ICM-20689
- アクセル/ジャイロ: BMI055/ICM-20602
- マグ: IST8310
- 気圧計: MS5611
- アクセル/ジャイロ: ICM-20689
電気データ
- 電源モジュール出力: 4.9~5.5V
- 最大入力電圧: 6V
- 最大電流検知: 120A
- USB電源入力: 4.75~5.25V
- サーボレール入力: 0~36V
- 動作温度: -25~85°C
機械データ
- 寸法: 44x84x12mm
- 重量(プラスチックケース): 33。3グラム
- 重量(アルミケース): 49g
ダウンロード:
品番 11032/11035 含まれるもの:
- Pixhawk 4 フライトコントローラー (プラスチックまたはアルミニウム)
- ケーブルセット
製品番号 20045/20046/20114/20115 含まれるもの:
- Pixhawk 4 フライトコントローラー(プラスチックまたは アルミニウム)
- 電源モジュール: PM02 V3 12S/PM07 14S
- ケーブルセット
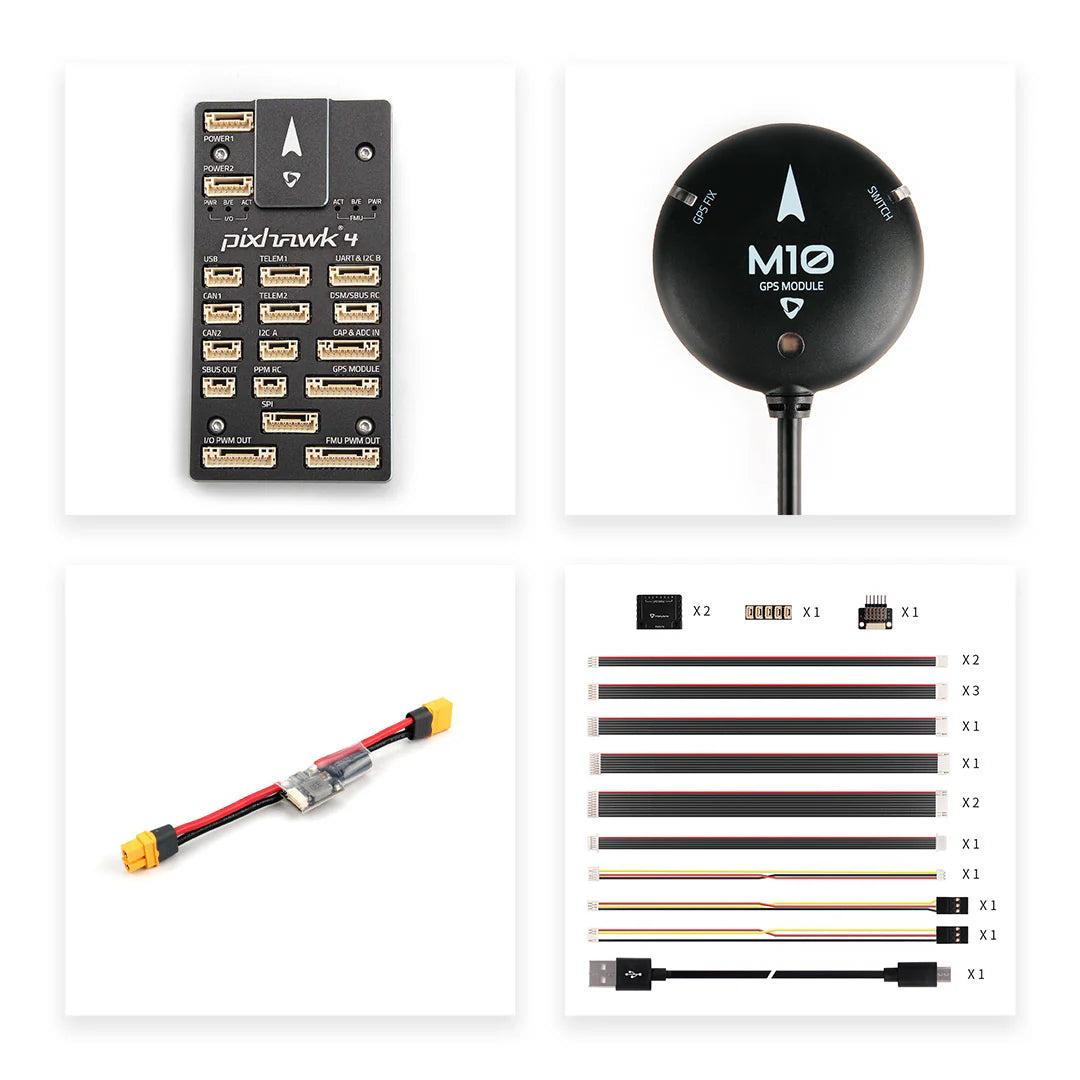
製品番号 20139/20140/20141/20142/20269/20270/20271/20272 含まれるもの:
- Pixhawk 4 フライトコントローラー
- 電源モジュール: PM02 V3 12S/PM07 14S
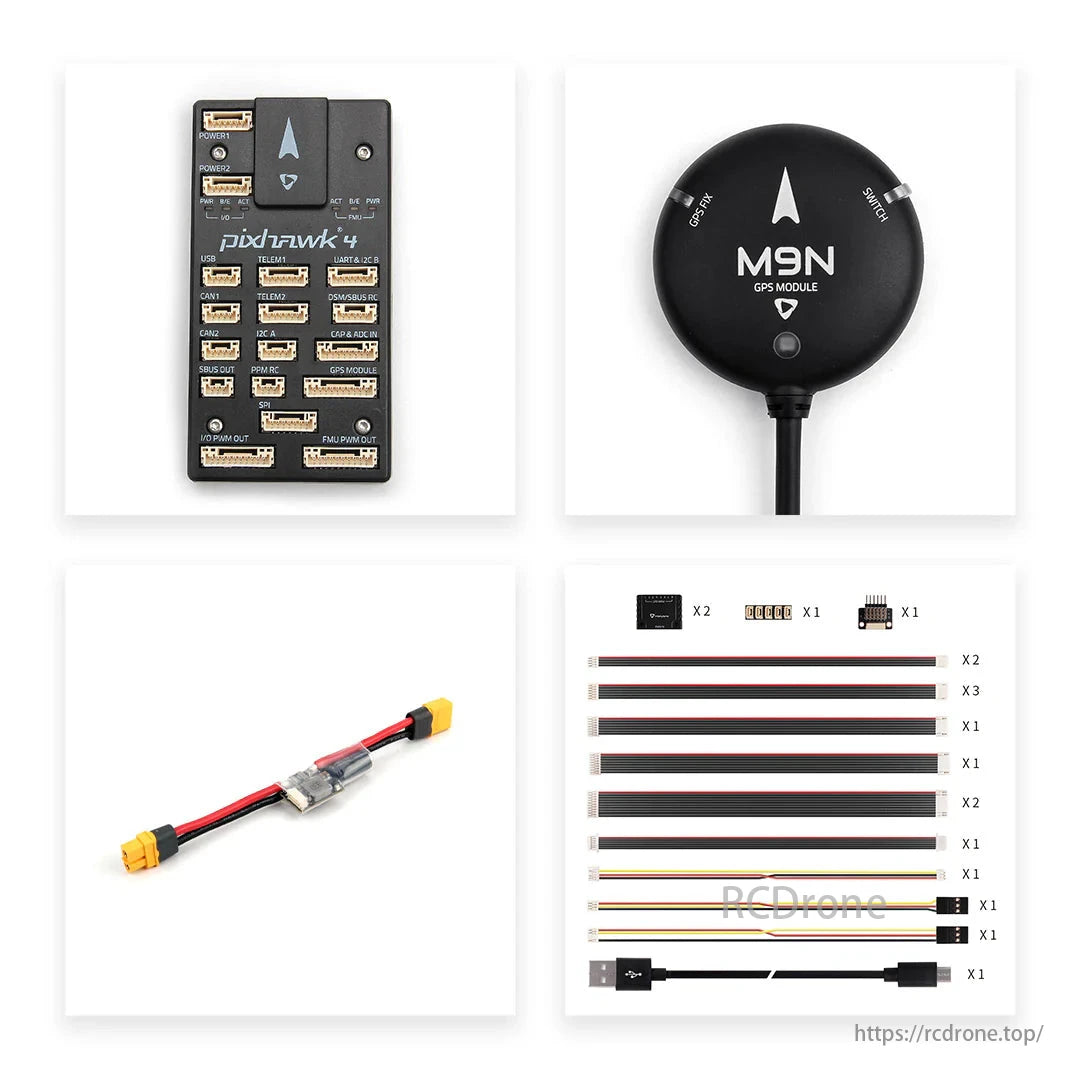
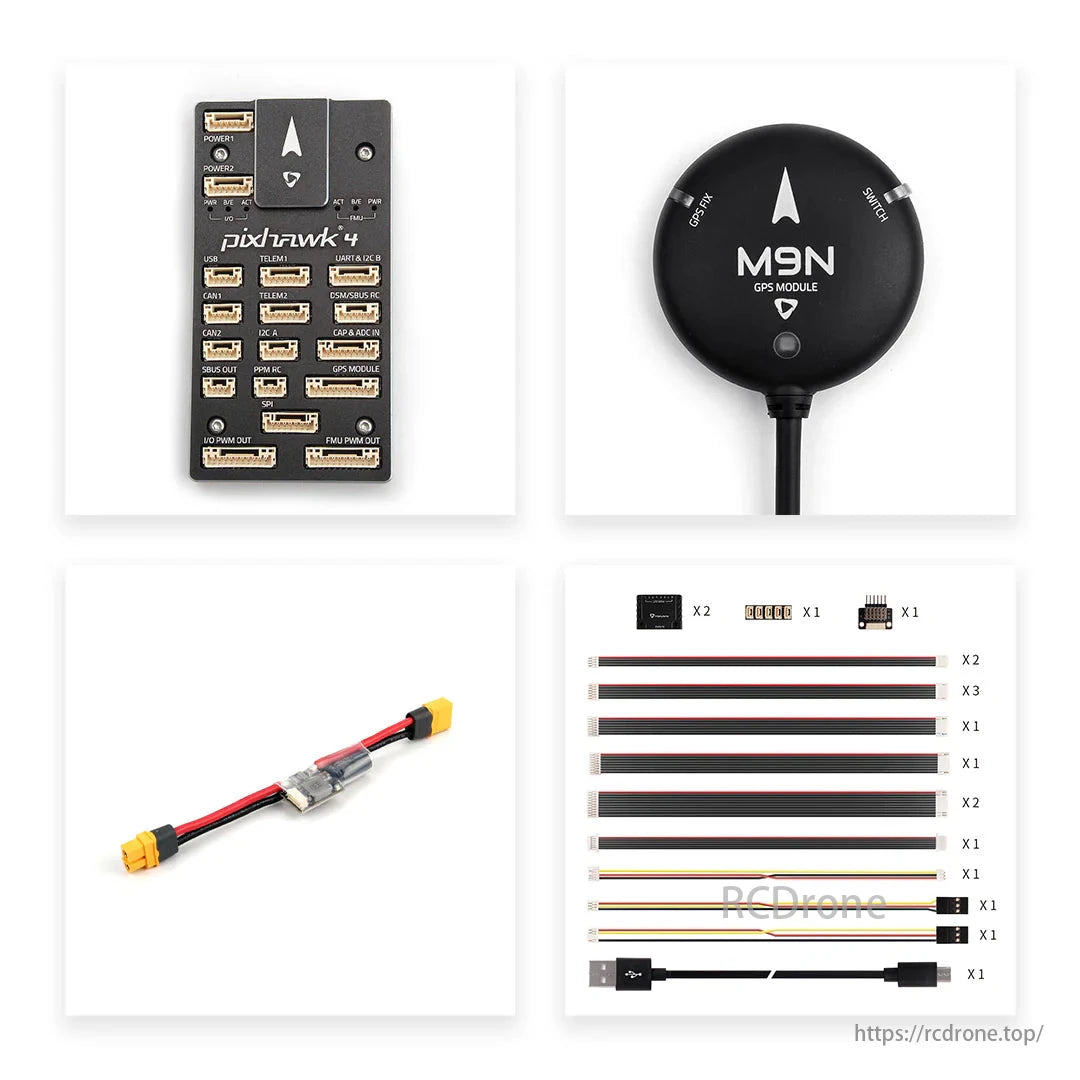
- GPS: M9N/M10
- ケーブルセット

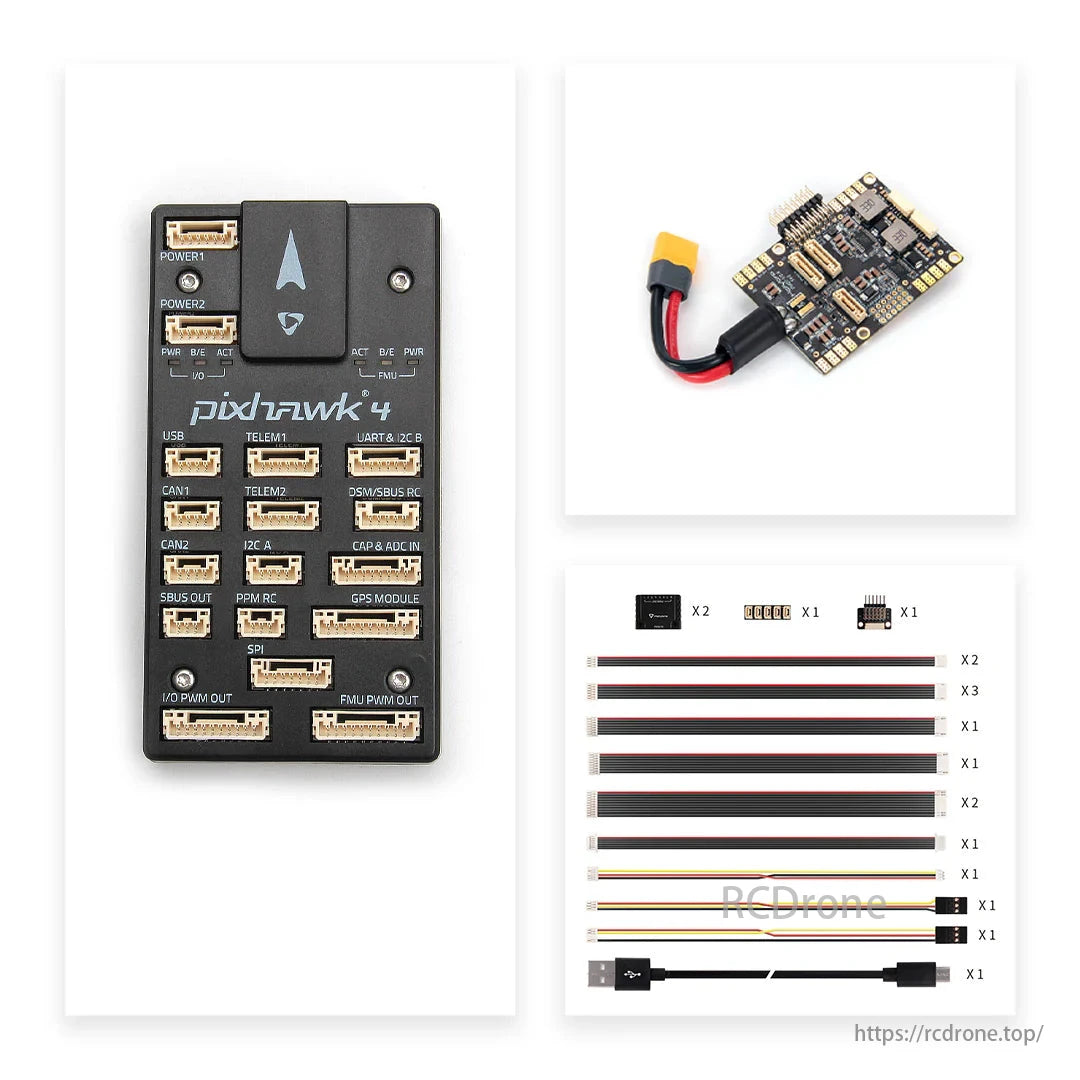
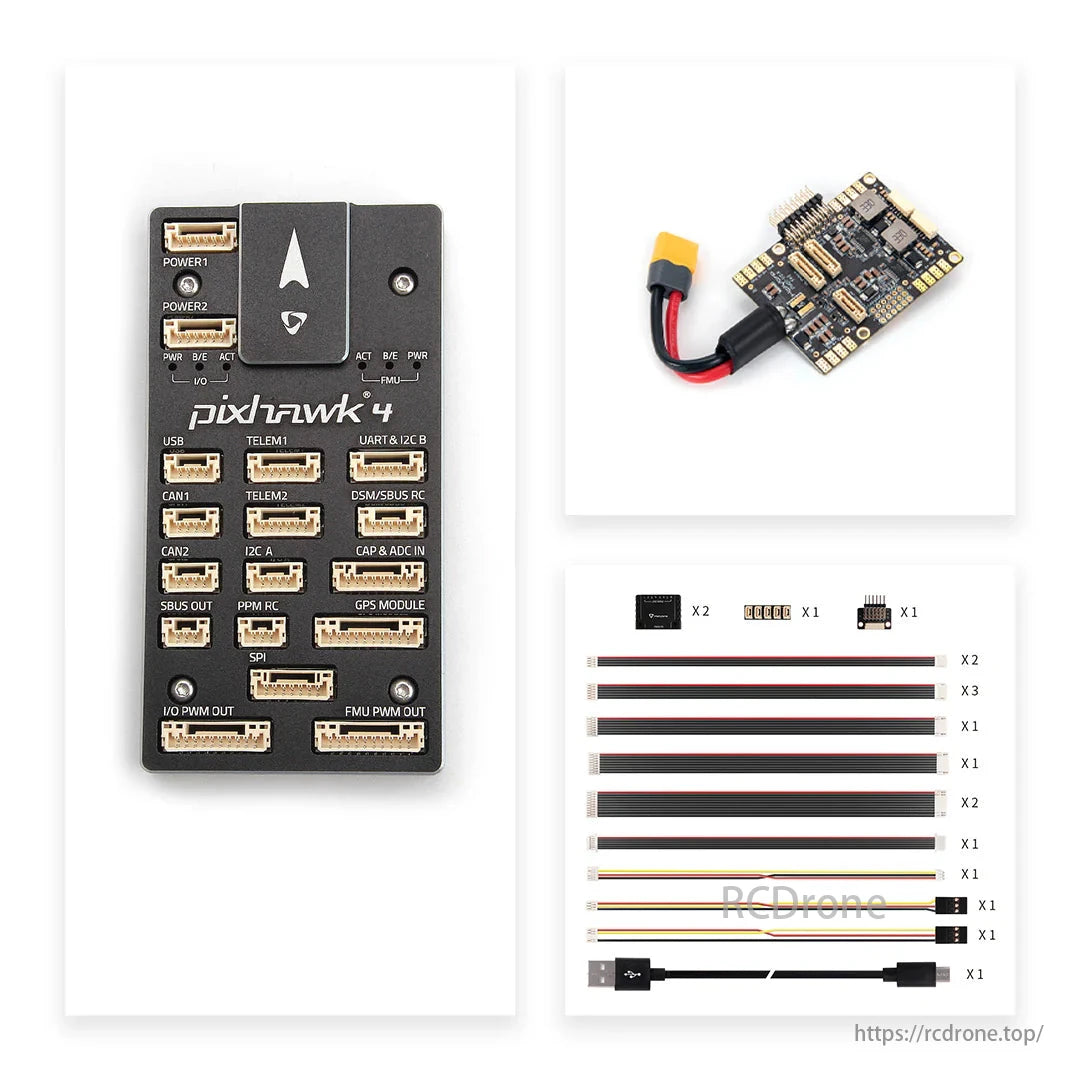
USB、CAN、TELEM、UART、I2C、SBUS OUT、PPM RC、SPI、GPS モジュールなどのさまざまなポートを備えた Pixhawk 4 フライト コントローラー。

PX4 自動操縦システムを搭載した Pixhawk フライト コントローラー。

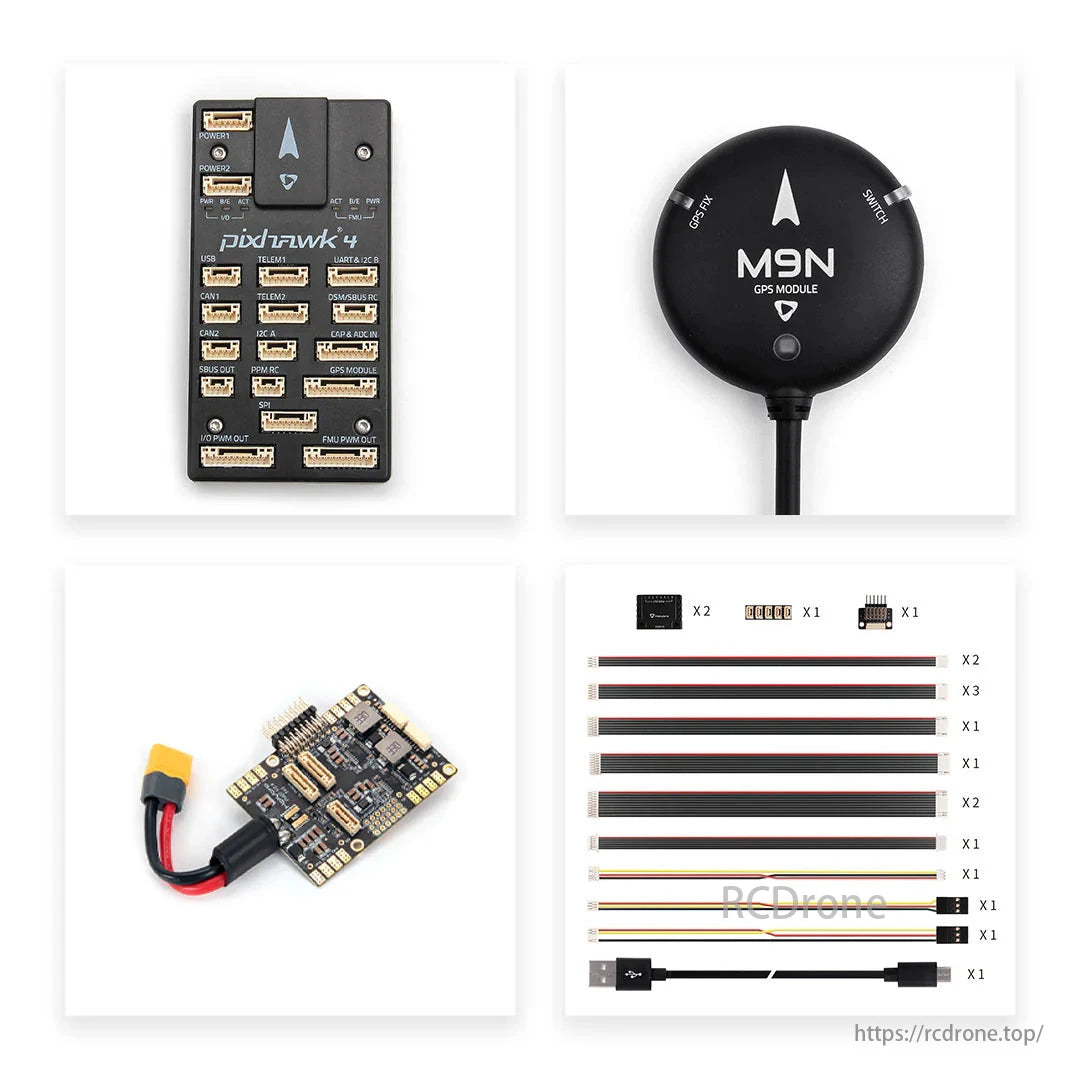
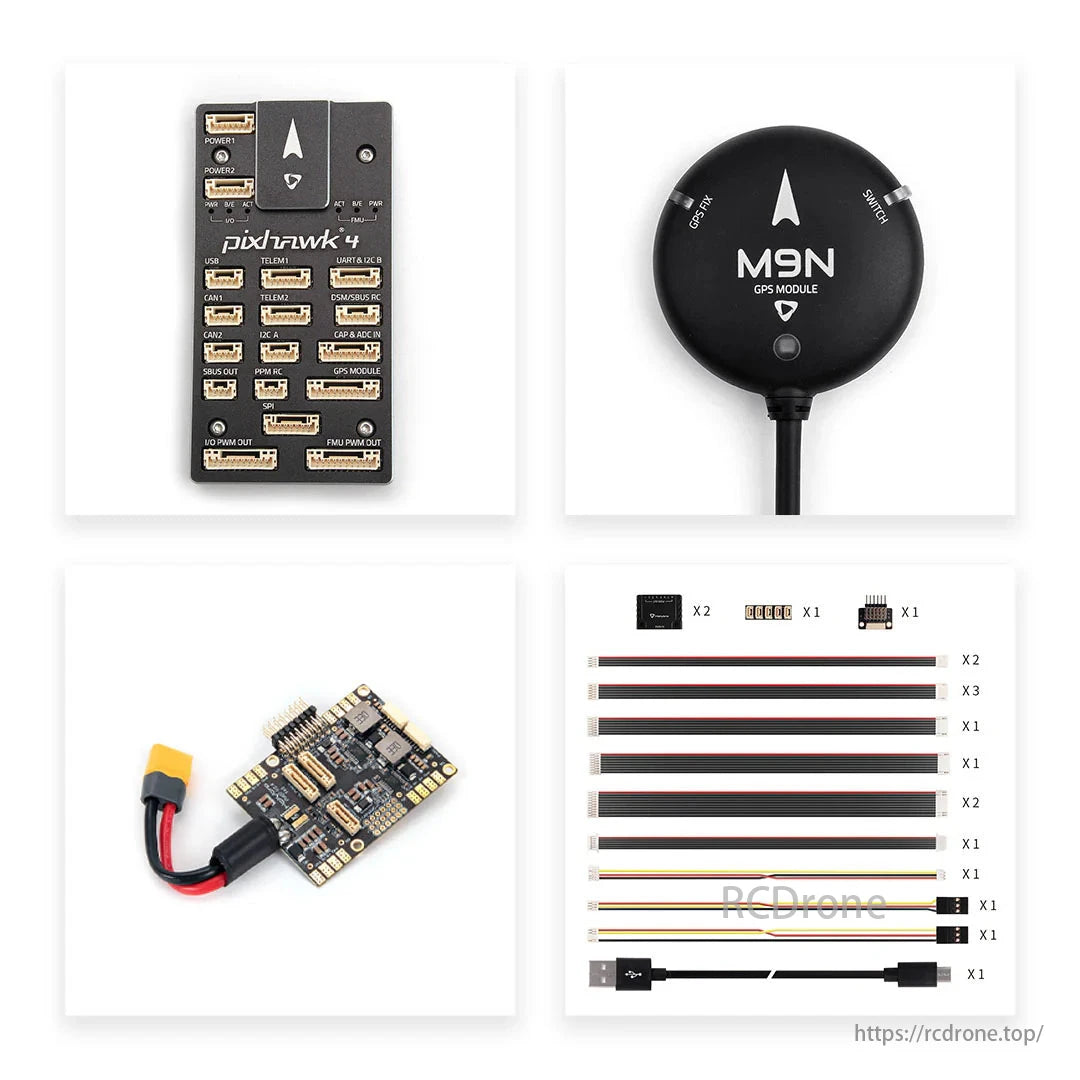
Pixhawk 4 フライト コントローラー、M9N GPS モジュール、XT60 コネクタ付き電源モジュール、および RC ドローン組み立て用のさまざまなケーブル。

USB、CAN、GPS モジュールなどのさまざまなポートを備えた Pixhawk 4 フライト コントローラー。電源モジュールと接続用の複数のケーブルが含まれています。

Pixhawk 4 フライト コントローラー、M9N GPS モジュール、XT60 コネクタ付き電源モジュール、および接続用の各種ケーブル。
Related Collections