Holybro Pixhawk 5X オートパイロット フライト コントローラー
Holybro Pixhawk 5X オートパイロット フライト コントローラー
HolyBro
受取状況を読み込めませんでした
Pixhawk® 5Xは、大成功を収めたPixhawkシリーズの最新モデルです。 ピクホークPixhawk® FMUv5X オープン スタンダードおよび Pixhawk® オートパイロット バス スタンダードに基づく ® フライト コントローラー。 最新の PX4 Autopilot® がプリインストールされており、3 重冗長性、温度制御、分離されたセンサー ドメインを備え、驚異的なパフォーマンスと信頼性を実現します。
Pixhawk® 5X には、STMicroelectronics® ベースの STM32F7 と、Bosch®、InvenSense® のセンサー技術が組み合わされており、学術用途と商用用途の両方に適した、あらゆる自律走行車を制御するための柔軟性と信頼性が得られます。 Pixhawk® 5X の F7 マイクロコントローラには、2MB のフラッシュ メモリと 512KB の RAM が搭載されています。PX4 Autopilot は、増加したパワーと RAM を活用します。更新された処理能力のおかげで、開発者は開発作業の生産性と効率性を高め、複雑なアルゴリズムやモデルに対応できるようになります。
FMUv5X オープン スタンダードには、安定性を高めるために設計された高性能で低ノイズの IMU が搭載されています。別々のバスに 3 重冗長 IMU と 2 重冗長気圧計が搭載されています。PX4 オートパイロットがセンサーの障害を検出すると、システムはシームレスに別のセンサーに切り替わり、飛行制御の信頼性を維持します。
独立した LDO が、独立した電源制御により各センサー セットに電力を供給します。新しく設計された振動絶縁により、高周波振動を除去してノイズを低減し、正確な読み取りを保証し、車両の全体的な飛行性能を向上させます。 外部センサー バス (SPI5) には、SPI インターフェイスを備えた追加センサーとペイロード用の 2 つのチップ選択ラインとデータ準備完了信号があり、統合された Microchip Ethernet PHY (LAN8742AI-CZ-TR) により、イーサネット経由のミッション コンピューターとの高速通信がサポートされるようになりました。2 つのスマート バッテリー監視ポート (SMBus)、INA226 SMBus 電源モジュールのサポート。
Pixhawk® 5Xは、企業の研究室、スタートアップ、学術機関(研究者、教授、学生)、商用アプリケーションの開発者に最適です。Pixhawk 5Xは、 PX4 オートパイロット & Ardupilot ファームウェア。
注記:
- Pixhawk 5Xは、次のような電源モジュールからの電圧と電流データにI2Cプロトコルを必要とします。 PM02Dアナログ電源モジュール (PM02、PM06、PM07) は Pixhawk 5X と互換性がありません。 パワーモジュール比較表
- デフォルトでは PX4 ファームウェアが付属しています。ユーザーは、Mission Planner または QGroundControl 経由でファームウェアをフラッシュすることで、Ardupilot ファームウェアを使用することもできます。
主な設計ポイント
- モジュラーフライトコントローラー: 100ピンと50ピンのPixhawk®オートパイロットバスコネクタで接続された分離されたIMU、FMU、ベースシステム。柔軟でカスタマイズ可能なシステム向けに設計されています。
- 冗長性: 3 つの IMU センサーと 2 つの気圧センサーが別々のバス上にあり、ハードウェア障害が発生した場合でも並行して連続的に動作できます。
- 3重冗長ドメイン: 独立したバスと独立した電源制御を備えた完全に分離されたセンサードメイン
- 振動絶縁システムにより高周波振動を除去し、ノイズを低減して正確な測定を保証します。
- 高速ミッションコンピュータ統合のためのイーサネットインターフェース
- 変動する信号や温度を排除する自動センサー校正
- IMUはオンボードの加熱抵抗器によって温度制御され、IMUの最適な動作温度を実現します。
技術仕様
- FMUプロセッサ: STM32F765
- 32 ビット Arm® Cortex®-M7、216MHz、2MB メモリ、512KB RAM
- IOプロセッサ: STM32F100
- 32 ビット Arm® Cortex®-M3、24MHz、8KB SRAM
- 搭載センサー
- アクセル/ジャイロ: ICM-20649 (ハードマウント)
- アクセル/ジャイロ: ICM-42688P (ソフトマウント)
- アクセル/ジャイロ: ICM-20602 または BMI088 (ソフトマウント)
- マグ: BMM150
- 気圧計: BMP388 x 2
電気データ
- 電圧定格:
- 最大入力電圧: 6V
- USB電源入力: 4.75~5.25V
- サーボレール入力: 0~36V
インターフェース
- 16- PWMサーボ出力
- Spektrum / DSM 用 R/C 入力
- PPMおよびS.Bus入力専用のR/C入力
- 専用のアナログ/PWM RSSI 入力および S。バス出力
- 4つの汎用シリアルポート
- 3 フルフロー制御付き
- 1Aの電流制限を別途備えた1台
- 1 I2Cおよび外部NFCリーダー用の追加GPIOライン付き
- GPSポート2個
- フルGPS 1個と安全スイッチポート
- 基本 GPS ポート 1 つ
- 1 つの I2C ポート
- イーサネットポート 1 個
- トランスレスアプリケーション
- 100Mbps
- 1 SPIバス
- 2つのチップセレクトライン
- 2つのデータ準備ライン
- 1 SPI SYNCライン
- 1 SPI リセットライン
- CAN周辺機器用の2つのCANバス
- CANバスには個別のサイレントコントロールまたはESC RX-MUXコントロールがあります
- SMBus付き電源入力ポート2個
- 1 つの AD および IO ポート
- 2つの追加アナログ入力
- 1 PWM/キャプチャ入力
- 2つの専用デバッグおよびGPIOライン
機械データ
- 寸法
- フライトコントローラモジュール: 38.8 x 31.8 x 14.6mm
- ミニベースボード: 43.4 x 72.8 x 14.2 mm
- 標準ベースボードv1: 52.4 x 103.4 x 16.7mm
- 標準ベースボード v2A: 40.2 x 92.3 x 18.4mm
- 標準ベースボード v2B: 40.2 x 98.3 x 16.9mm
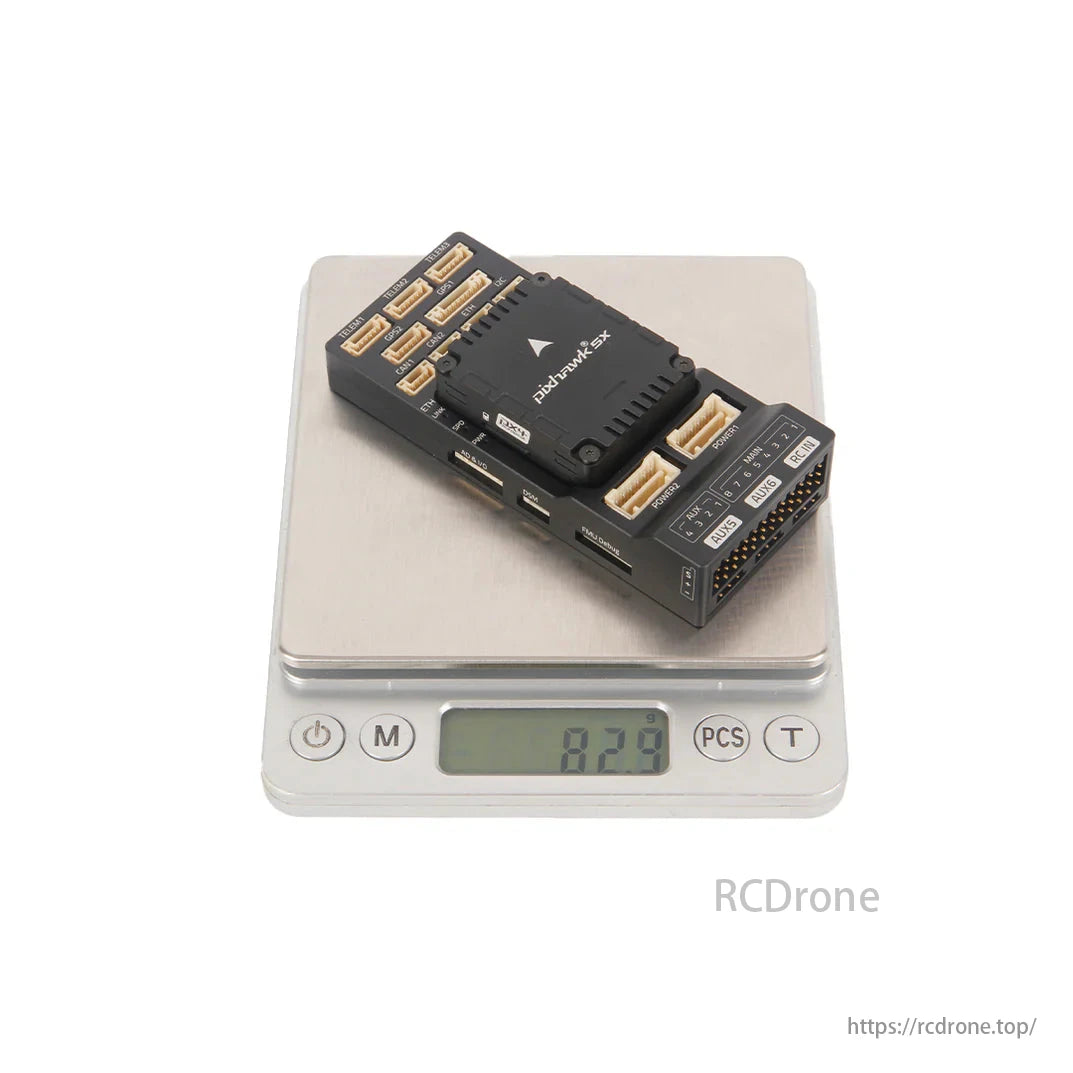
- 重さ
- フライトコントローラモジュール: 23g
- ミニベースボード:26。8グラム
- 標準ベースボードv1: 51g
- 標準ベースボードv2A: 58g
- 標準ベースボード v2B: 58g
SKU 11045 には以下が含まれます:
- Pixhawk 5X フライト コントローラー モジュール
SKU 20307/SKU 20320/SKU20310 には以下が含まれます:
- Pixhawk 6X フライト コントローラー モジュール
- 標準ベースボード v2A/v2B またはミニベースボード
- PM02D HVパワーモジュール
- ケーブルセット
- Pixhawk 6X フライト コントローラー モジュール
- 標準ベースボード v2A/v2B またはミニベースボード
- PM02D HVパワーモジュール
- ケーブルセット
- M9N/M10 GPS
Pixhawk mini、Pixhawk Baseboard v1、および Pixhawk Baseboard v2 の 2 つのバリエーション (v2A と v2B) の寸法を示します。mini は 43.4 x 72.8 mm、v1 は 52 x 101.90 mm、v2A は 40.2 x 92.3 mm、v2B は 40.2 x 98.3 mm です。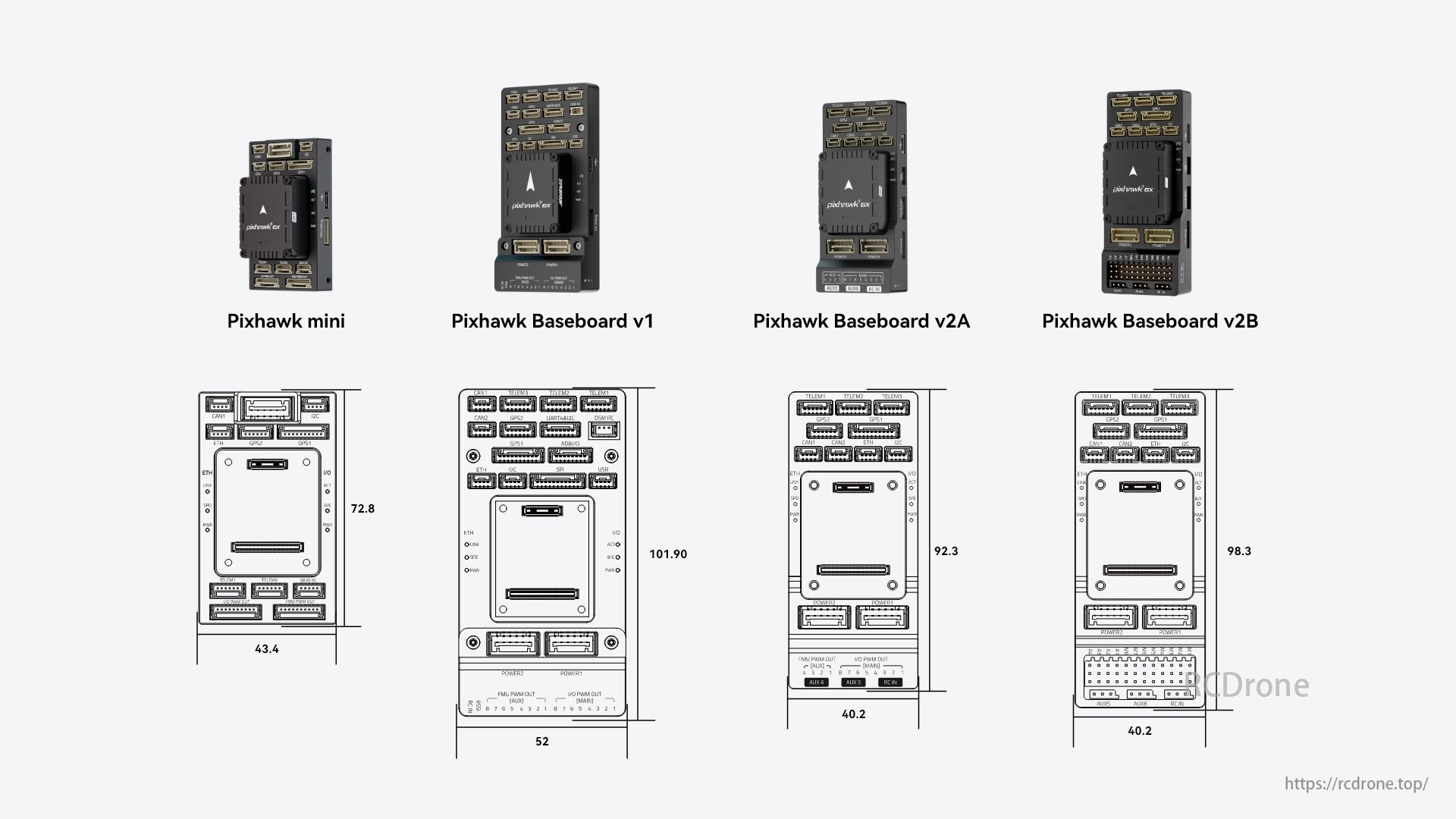
配線サンプルガイド

Holybro Pixhawk 5X の図には、プライマリおよびセカンダリ GPS、UART4 および I2C ポート、CAN1 および 2、DSM RC 受信機、テレメトリ ラジオ、HD FPV IP カメラ、バッテリー、電源モジュール、ESC、および配電ボードが含まれています。
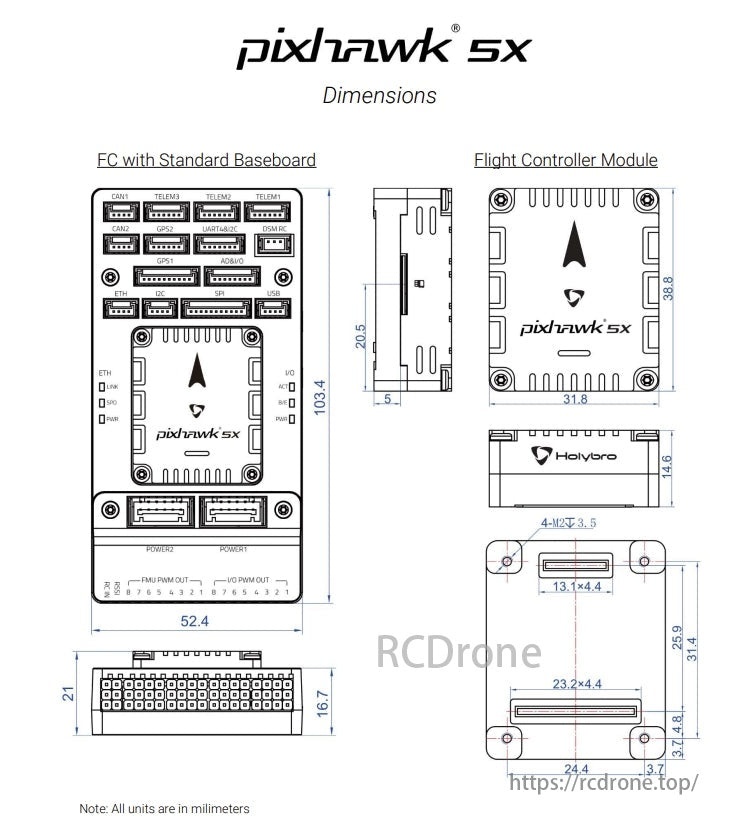
Pixhawk SX の寸法には、フライト コントローラー モジュールと標準ベースボード付きの FC が含まれます。モジュールの寸法は 31.8 x 38.8 mm、ベースボードの寸法は 103.4 x 52.4 mm です。単位はすべてミリメートルです。

標準ベースボードの寸法: 103.4 x 58 x 10.7 mm、USB、イーサネット、電源入力などのさまざまなポートとコネクタを備えています。


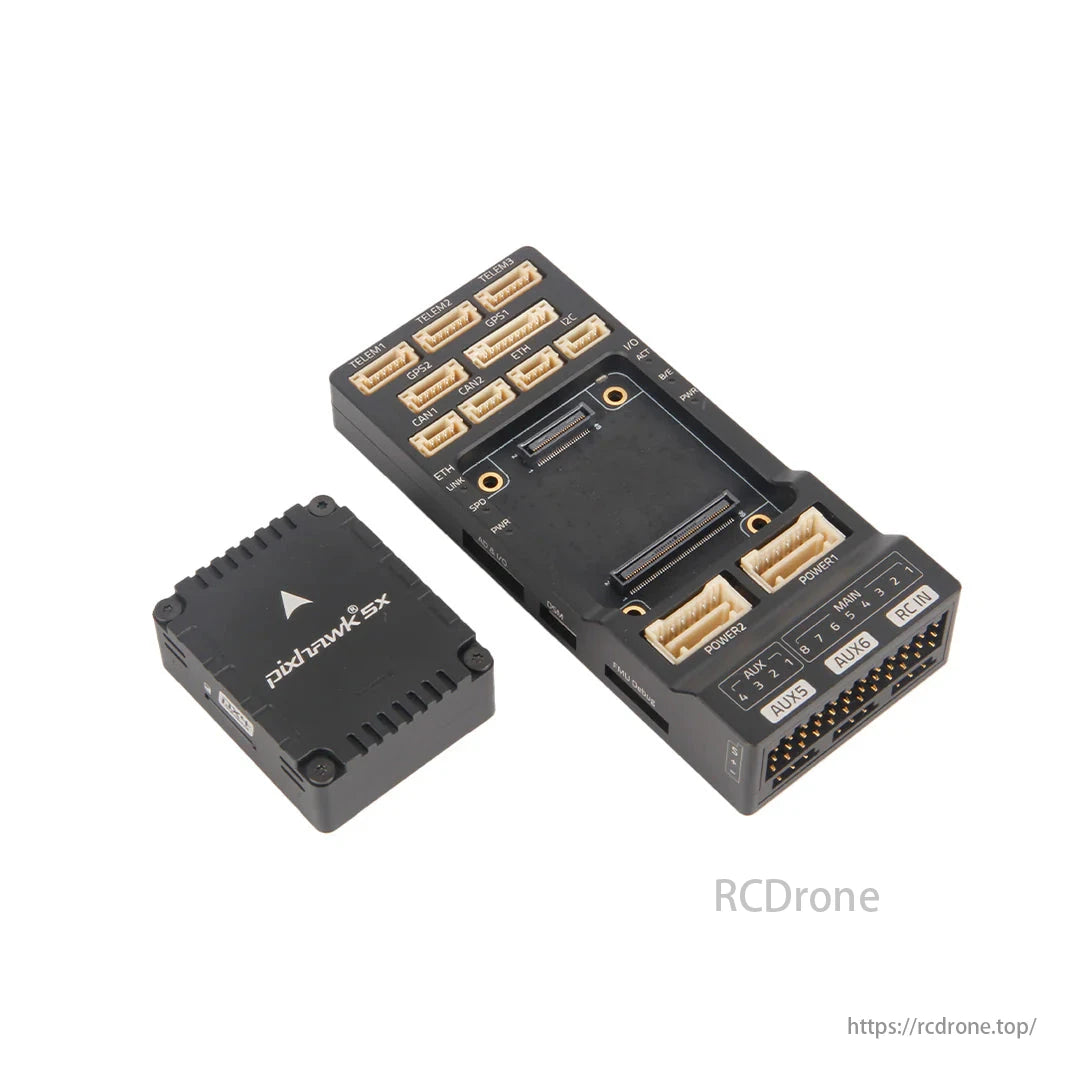
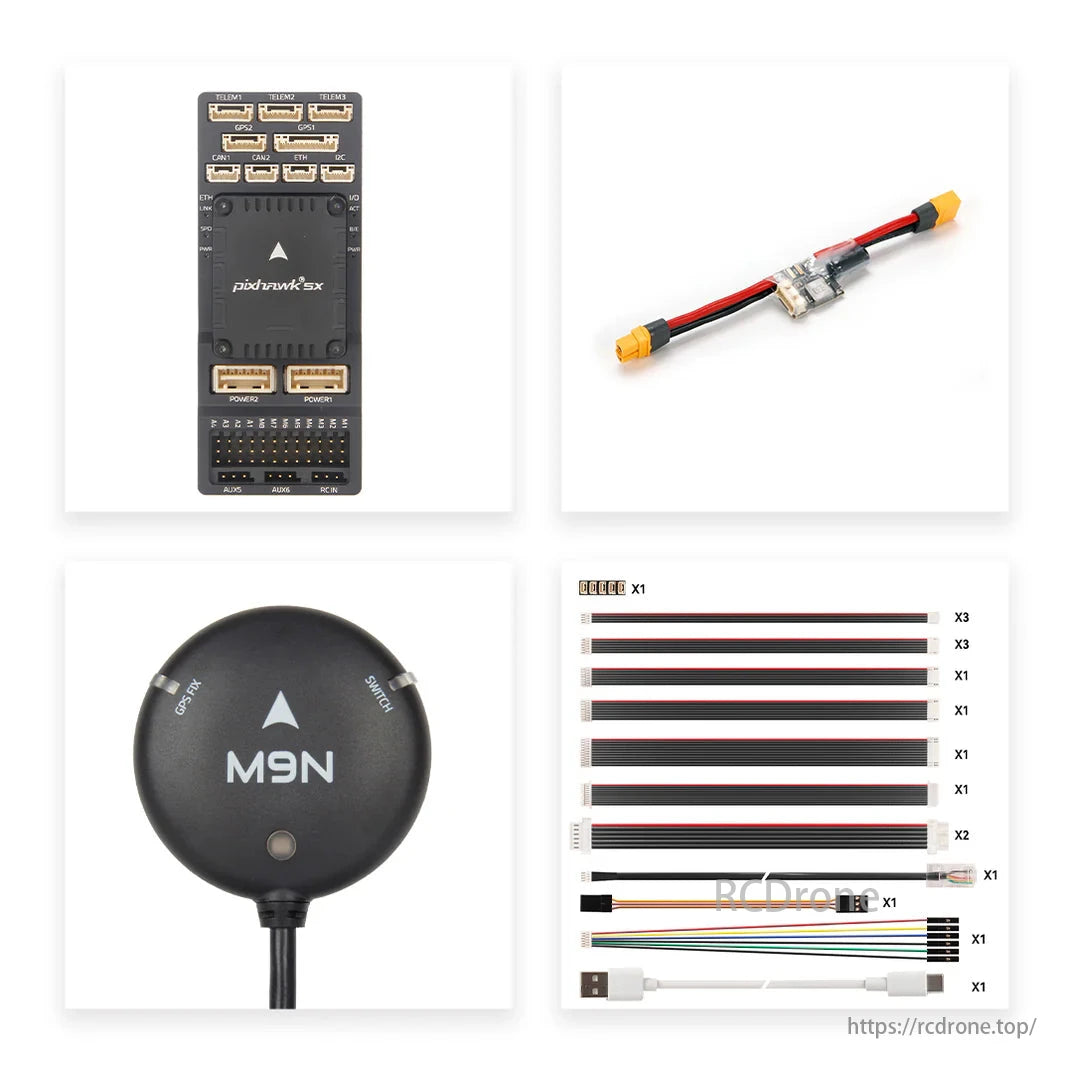
TELEM1-3、GPS1-2、CAN1-2、ETH、I2C、POWER1-2、AUX5-6、および RC IN ポートを備えた Pixhawk 5X フライト コントローラー。
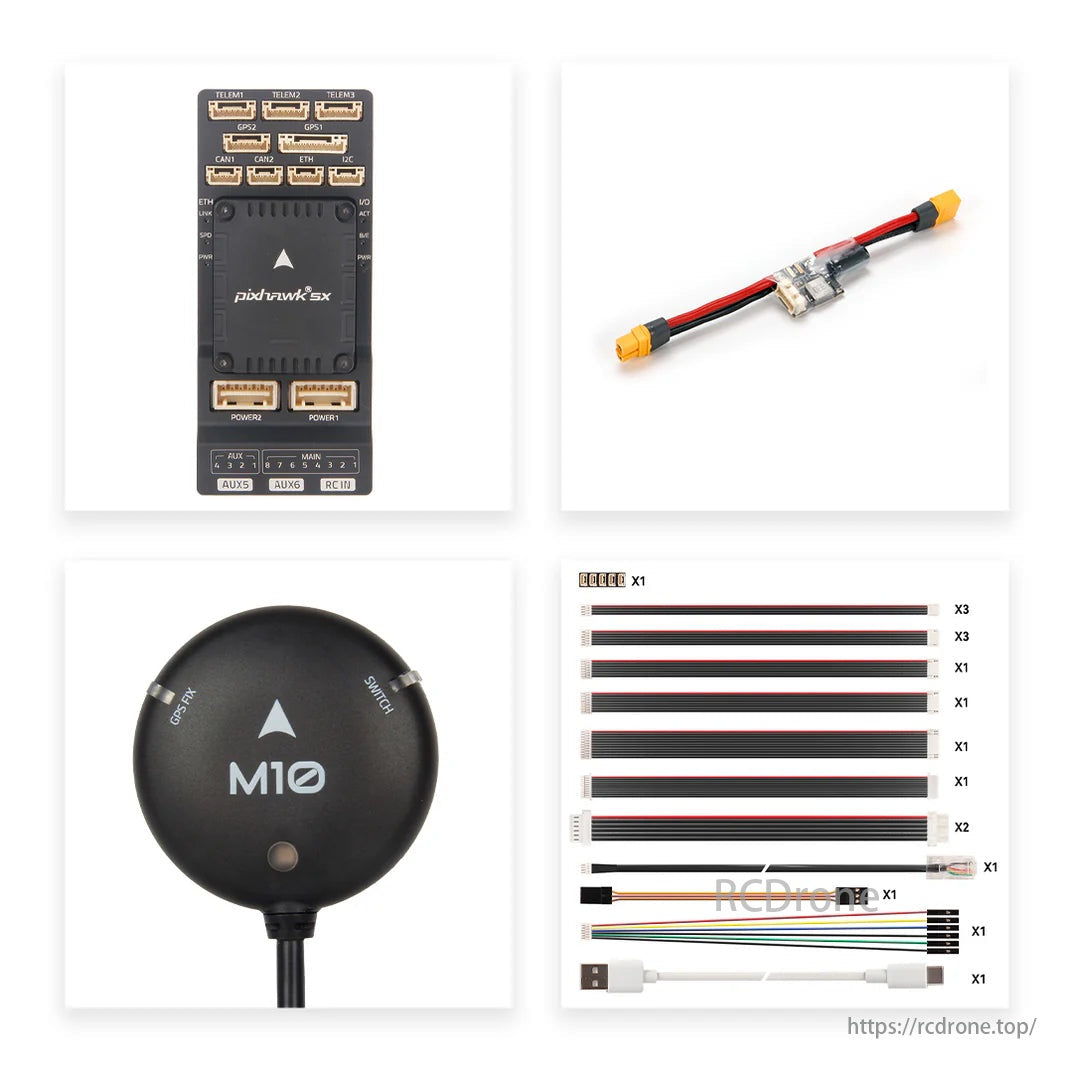
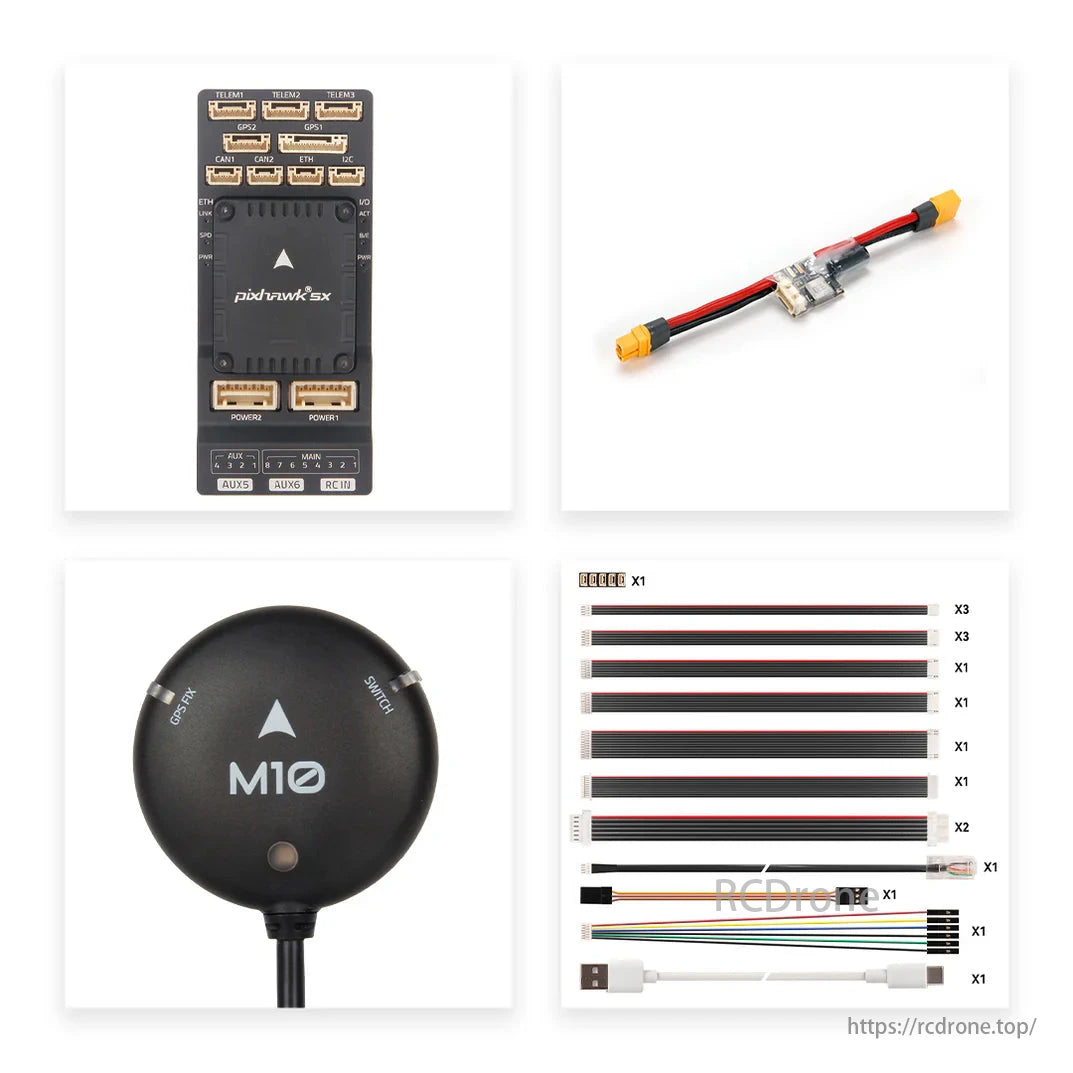
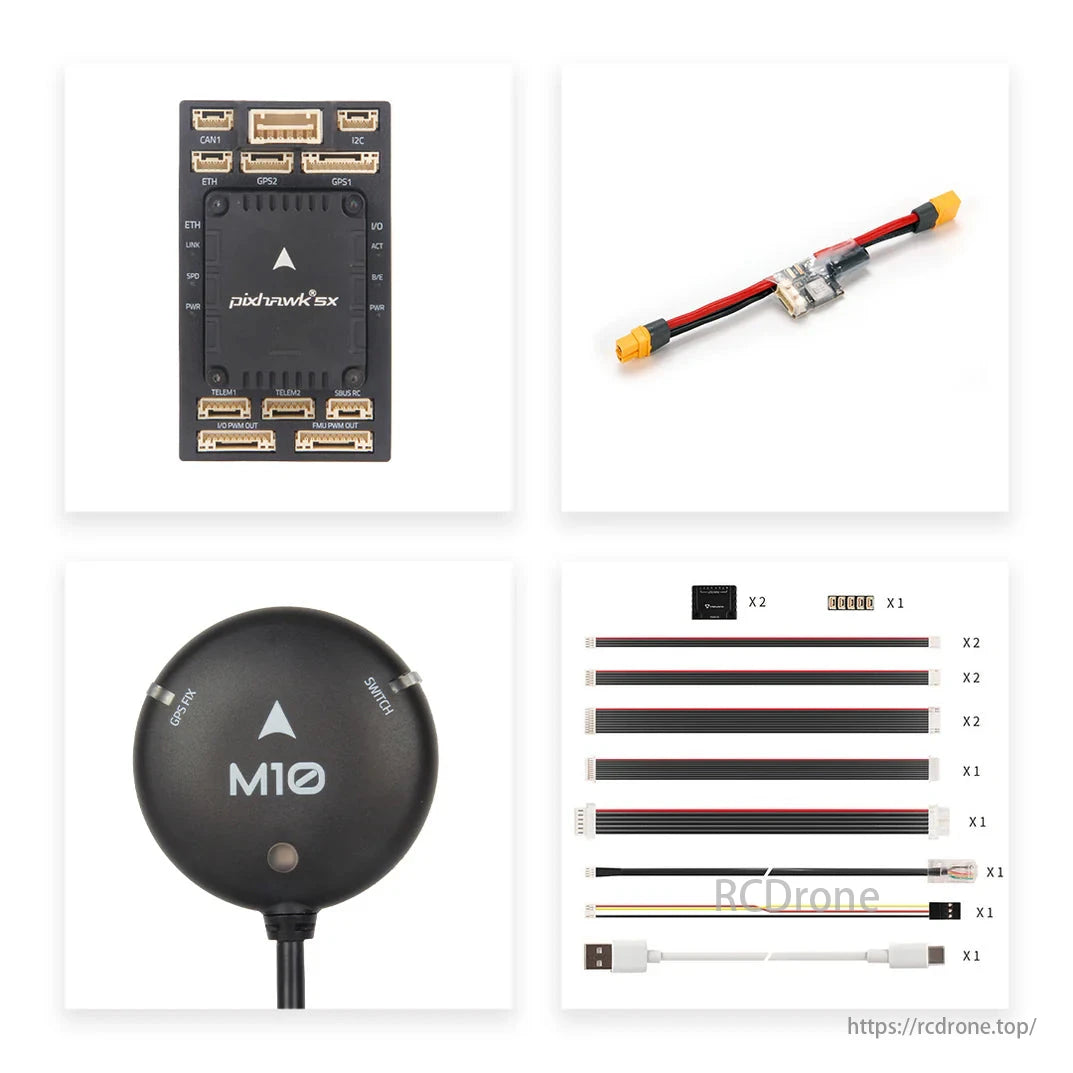
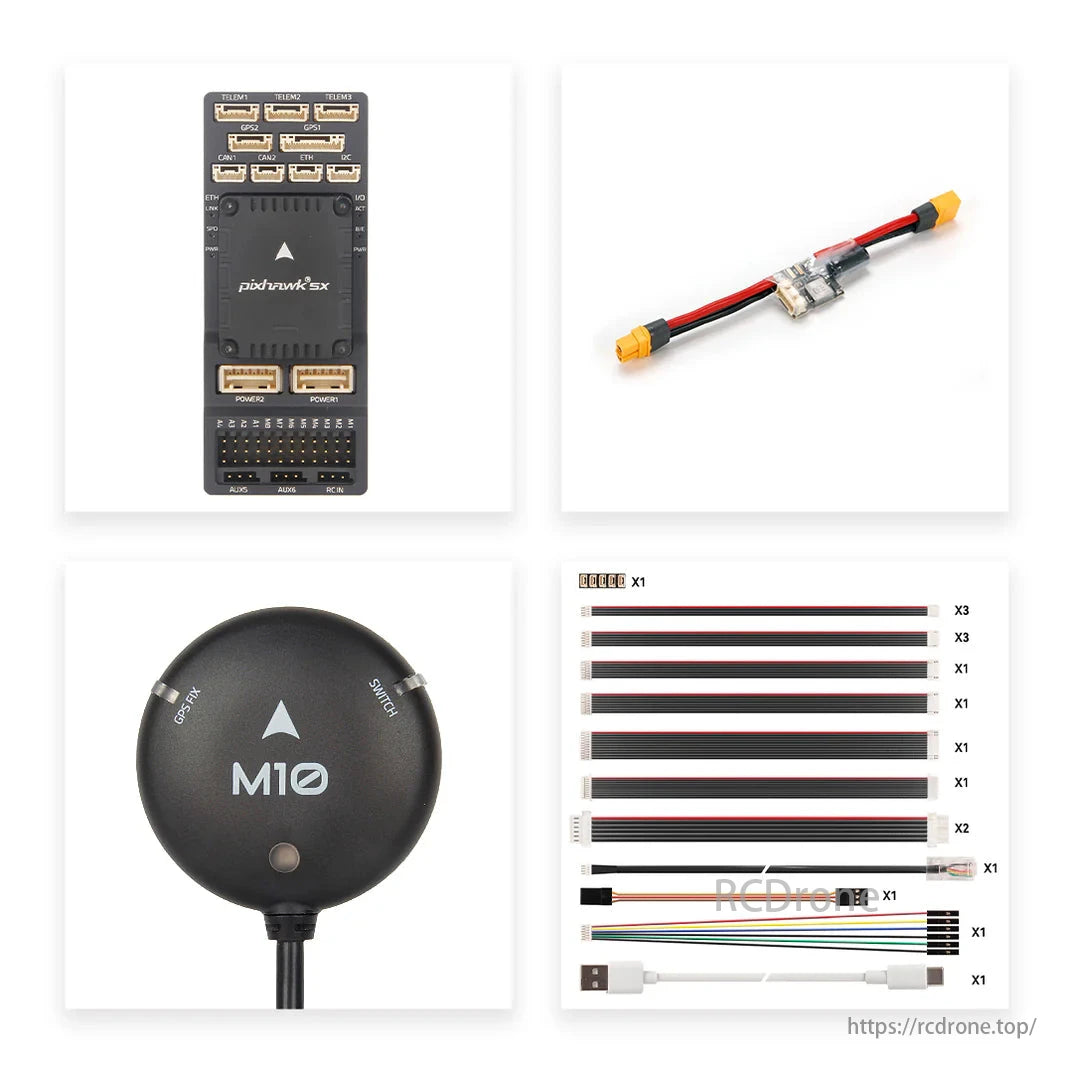
Pixhawk 5X フライト コントローラー、M10 GPS モジュール、電源モジュール、およびドローン組み立て用のさまざまなケーブル。
Related Collections