Holybro Pixhawk 6X-RT - (開発者版) オートパイロット フライト コントローラー スタンダード/ミニ セット
Holybro Pixhawk 6X-RT - (開発者版) オートパイロット フライト コントローラー スタンダード/ミニ セット
HolyBro
受取状況を読み込めませんでした
概要
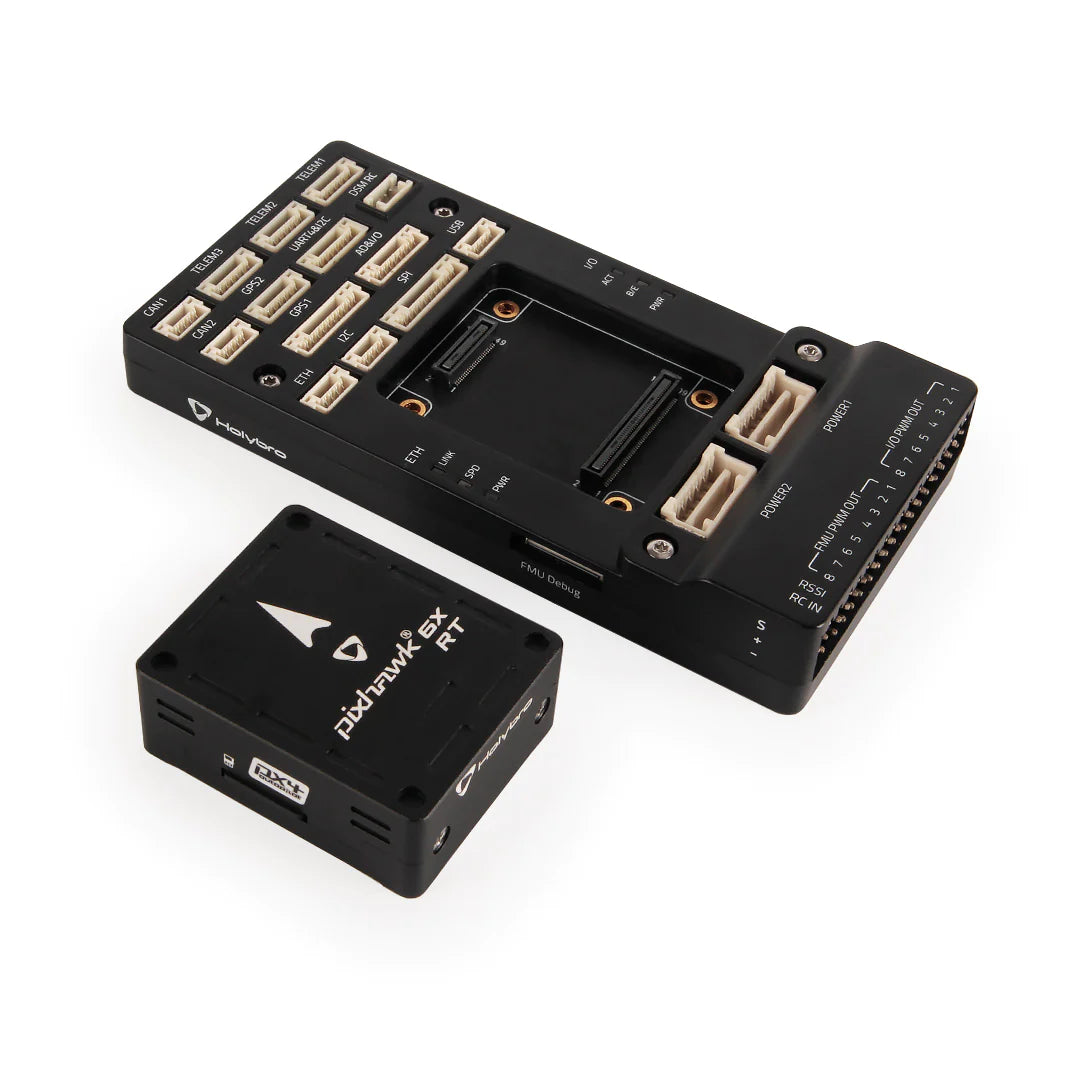
Pixhawk 6X-RT は、Pixhawk® FMUv6X-RT オープン スタンダードおよび Pixhawk® Autopilot Bus Standard に基づいています。 PX4 Autopilot® がプリインストールされています。 Pixhawk 6X-RT フライト コントローラーの内部には、NXP ベースの i.MXRT1176 MCU は、Bosch® および InvenSense® のセンサー技術と組み合わせて、あらゆる自動運転車の制御に柔軟性と信頼性をもたらします。
i.MXRT1176 マイクロコントローラーには、1 GHz の Arm® Cortex-M7 と 400 MHz の Cortex-M4 が含まれています。 2MB SRAM と 64MB オクタル SPI フラッシュを搭載しています。 更新された処理能力のおかげで、開発者は開発作業の生産性と効率性を高めることができ、複雑なアルゴリズムやモデルを使用できるようになります。
安定性を高めるために設計された高性能、低ノイズ IMU が含まれており、別個のバス上に 3 重冗長 IMU と 2 重冗長気圧計を備えています。 オートパイロットがセンサーの故障を検出すると、システムはシームレスに別のセンサーに切り替え、飛行制御の信頼性を維持します。 独立した LDO は、独立した電力制御によりすべてのセンサー セットに電力を供給します。 高周波振動を除去し、ノイズを低減して正確な測定値を保証する防振システムにより、車両の全体的な飛行性能が向上します。 統合されたマイクロチップ イーサネット PHY により、イーサネット経由でミッション コンピュータとの高速通信が可能になりました。
Pixhawk 6X-RT は、企業の研究所、新興企業、学者 (研究、教授、学生)、および商用アプリケーションの開発者に最適です。 このフライト コントローラーは、 Pixhawk ベースボード、 Pixhawk Mini ベースボード、 Pixhawk RPi CM4 ベースボードなど、Pixhawk Autopilot バスを使用するあらゆるベースボードと互換性があります。
主要な設計ポイント
- 高性能デュアルコア i.Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz を搭載した MXRT1176 プロセッサー
- モジュラー フライト コントローラー: 100 ピンおよび 50 ピンの Pixhawk® Autopilot バス コネクタで接続された、分離された IMU、FMU、ベース システム。
- 冗長性: 別個のバス上の 3x IMU センサーと 2x 気圧センサー
- 三重冗長ドメイン: 独立したバスと独立した電源制御を備えた完全に分離されたセンサー ドメイン
- 高周波振動を除去し、ノイズを低減して正確な測定値を保証する防振システム
- 高速ミッションコンピュータ統合用イーサネットインターフェース
- IMU はオンボード加熱抵抗器によって温度制御され、IMU の最適な動作温度が可能になります
- ハードウェア セキュア エレメント NXP EdgeLock SE051 広く信頼されている EdgeLock SE050 Plug & Trust セキュア エレメント ファミリの拡張機能であり、現場でのアプレットのアップデートをサポートし、 AVA_VAN を使用し、CC EAL 6+ に認定された実証済みのセキュリティ。5 から OS レベルまで、最新の攻撃シナリオに対する強力な保護を実現します。 Eg オペレータ ID を安全に保存する
注:
- この開発者向けエディションは早期採用者向けであり、飛行テスト時間の蓄積は継続されています
- このフライト コントローラーは現在、PX4 フライト スタックでのみサポートされています。 (ファームウェアターゲット: FMUv6xrt)。 Ardupilot ではサポートされていません。
- このフライト コントローラーはデジタル電源モジュールを使用しています (Pixhawk 6X と同じ、完全なリストはここにあります) 電源モジュールの比較表
仕様
-
MCU: i.MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400MHz
-
2MB SRAM
-
64MB オクタル SPI フラッシュ
-
IO プロセッサ: STM32F103
-
32 ビット Arm® Cortex®-M3、72MHz、64KB SRAM
-
オンボードセンサー
-
アクセル/ジャイロ: BMI088
-
アクセル/ジャイロ: ICM-42670-P
-
アクセル/ジャイロ: ICM-42686-P
-
マグ: BMM150
-
気圧計: 2x BMP388
- ハードウェア セキュア エレメント
- NXP エッジロック SE051C2
- SDHC インターフェース
- 12 チャンネル PWM
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M イーサネット
- USB
- オープンソース ソフトウェアの有効化
- PX4 オートパイロット
- NuttX RTOS
- ゼファー RTOS
SKU20257 スタンダード セット/SKU258 ミニ セットの内容:
-
Pixhawk 6X-RT フライト コントローラー モジュール
-
Pixhawk スタンダード ベース/Pixhawk ミニ ベース
- PM02D HV 電源モジュール
-
ケーブルセット
参考リンク:
- ファームウェアのフラッシュ手順 (Github)
- NXP IMXRT1176 1 GHz MCU 上の PX4 - NXP によるプレゼンテーション スライド
- i.MX RT1176 – 製品ページ Arm® Cortex® コアを搭載した 1 GHz クロスオーバー MCU
- EdgeLock® SE051: 更新可能性とカスタム アプレットをサポートする、実証済みの使いやすい IoT セキュリティ ソリューション
Related Collections