Holybro X500 v2 PX4 開発キット - Holybro Pixhawk 6C / 6X、M8N GPS、SiK テレメトリ無線、産業用ドローンを備えたカーボンファイバー ドローン キット
Holybro X500 v2 PX4 開発キット - Holybro Pixhawk 6C / 6X、M8N GPS、SiK テレメトリ無線、産業用ドローンを備えたカーボンファイバー ドローン キット
HolyBro
通常価格
$769.00 USD
通常価格
セール価格
$769.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
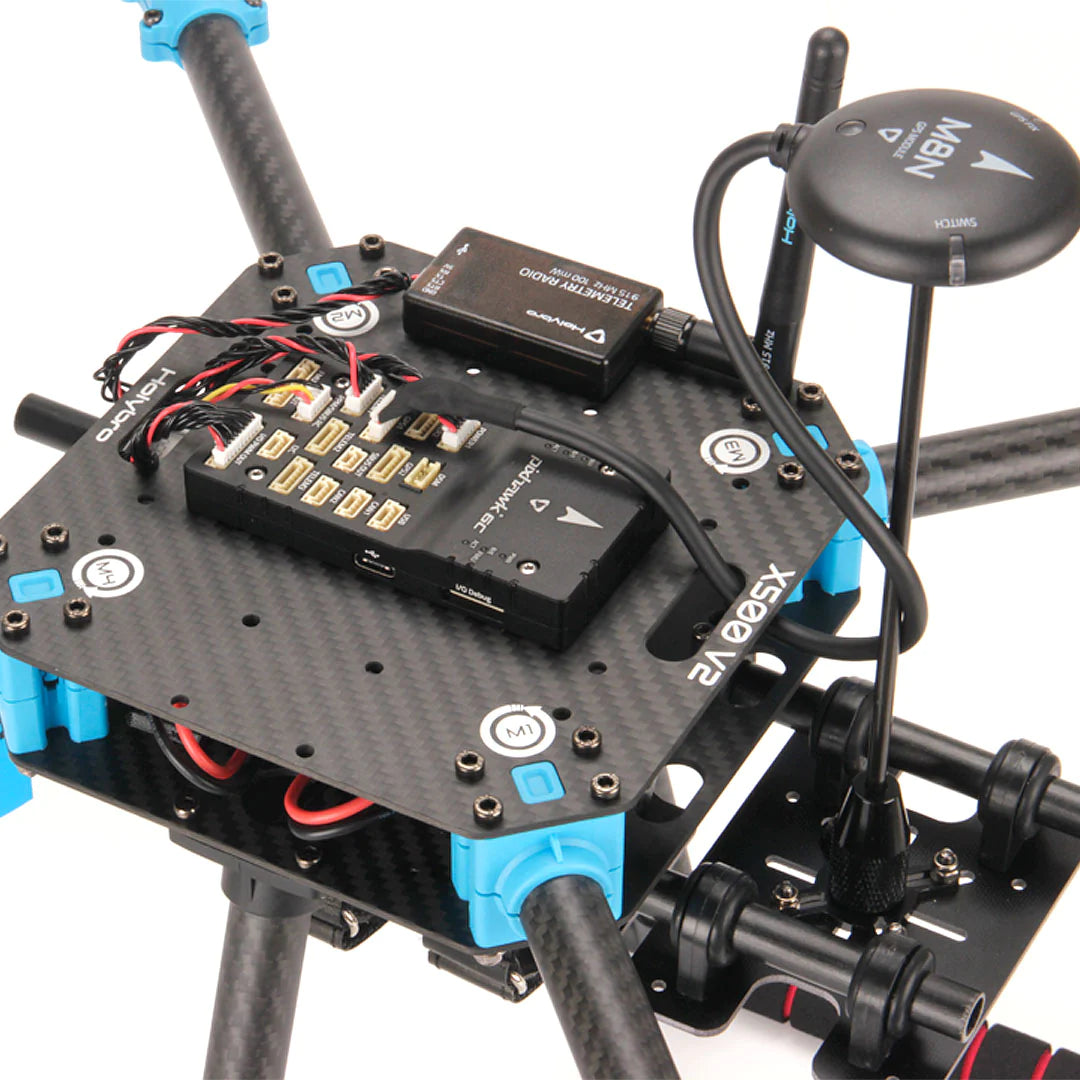
PX4 開発キット - X500 v2 は、最新の Holybro Pixhawk 6C または を備えた、手頃な価格で軽量かつ堅牢なカーボンファイバーのプロフェッショナル開発ドローン キットです。 > Pixhawk 6X オートパイロット フライト コントローラー、M8N GPS、プラグ アンド プレイの SiK テレメトリ ラジオ。はんだ付けの必要がなく、素早く簡単に組み立てられるので(約 30 分)、代わりに飛行や開発により多くの時間を費やすことができます。 X500 V2 フレーム キットとモーター、ESC、配電ボード、追加のプロペラが付属しています。ドローン アームにはモーターと ESC があらかじめ取り付けられているため、はんだ付けを必要とせずに配電盤に直接接続できます。
フレーム (X500 v2) はフルカーボンファイバーツイルで作られており、カーボンファイバーチューブアームは、便利なノッチが付いた新設計の繊維強化ナイロンコネクターでサポートされています。モーター側とボディ側の両方で、より簡単で簡単な取り付けが可能になります。着陸装置は、厚く強化されたコネクタ付きの直径 16 mm および 10 mm のカーボンファイバー チューブで構成されています。
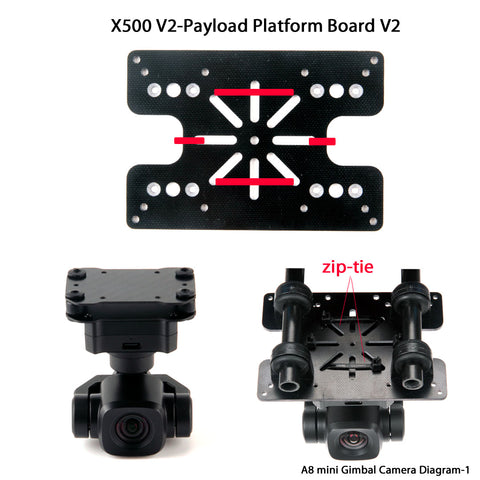
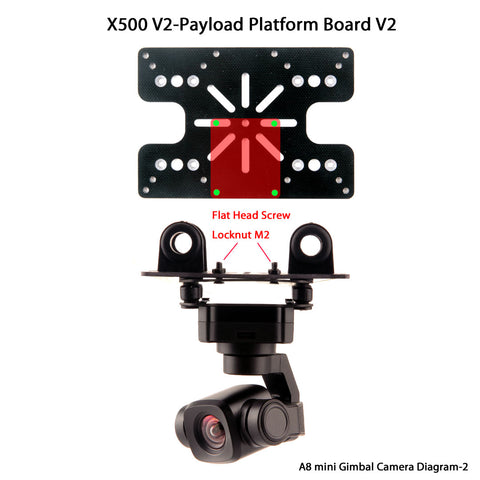
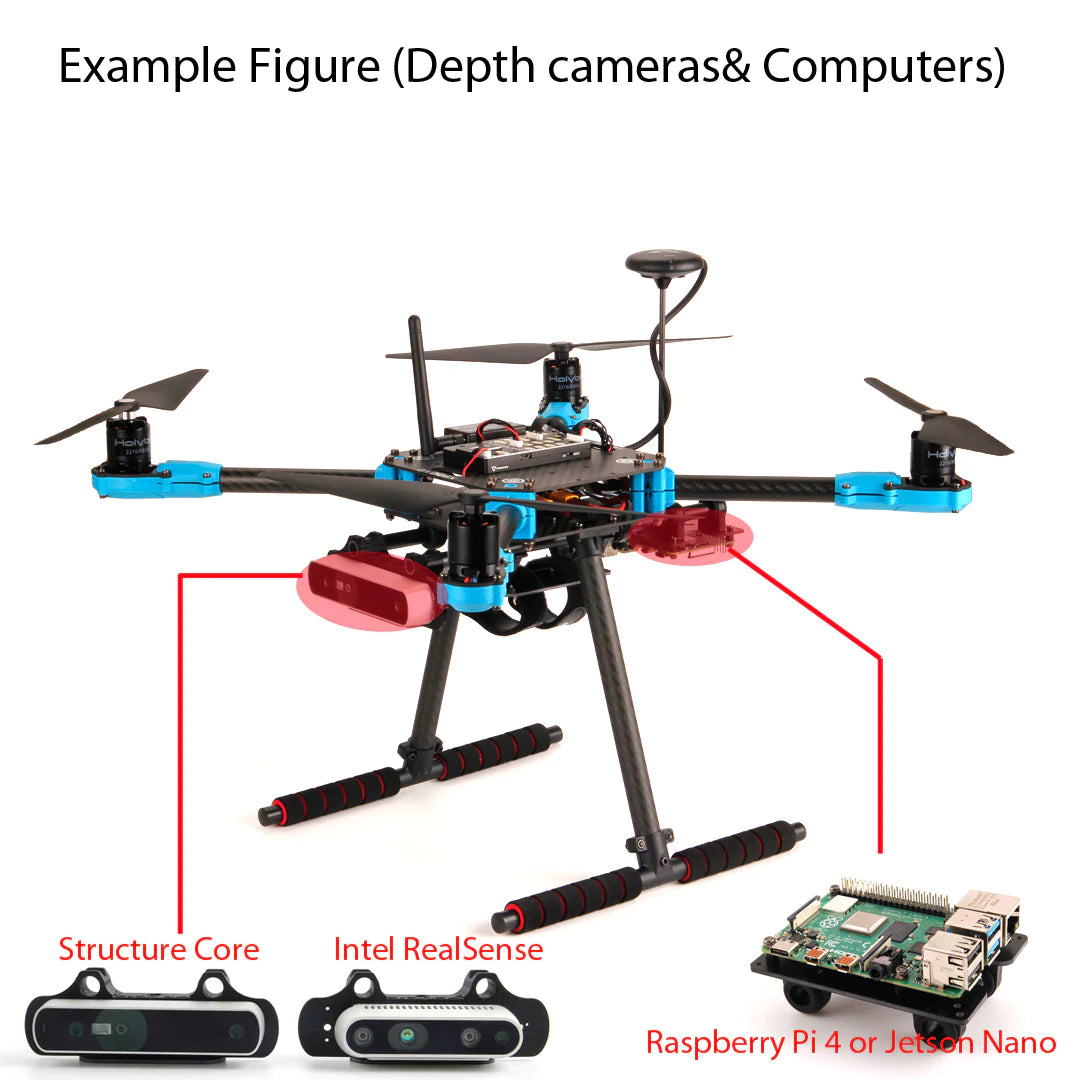
プラットフォーム ボードには、GPS や Raspberry Pi 4 や Jetson Nano などの人気のコンパニオン コンピューター用の取り付け穴が付いています。 Intel RealSense シリーズや Structure Core Depth カメラなどのさまざまな深度カメラ用に、 オプションの深度カメラ マウント (別途購入) があります。上部と下部のカーボンファイバープレート間の間隔が広くなり、アクセスが容易になりました。調整可能なバッテリー取り付けボードは、より長い飛行時間を実現するためにより大きなバッテリーをサポートするために拡大されました。レール マウント システムは、さまざまな用途に合わせてさまざまなカメラ マウントやジンバルを取り付けることができます。インストール用のツールはすべてパッケージに含まれています。
注: Pixhawk 6C フライト コントローラーは PX4 と Ardupilot の両方と互換性がありますが、PX4 オープンソース Autopilot ファームウェアが同梱されています。
機能:
- まったく新しい Pixhawk 6C または Pixhawk 6X フライト コントローラー M10 GPS モジュール および プラグ アンド プレイ SiK テレメトリー ラジオ
- 新しいフレーム設計により、組み立て時間は最小限(約 30 分)、はんだ付けは不要です
- 繊維強化ナイロン コネクタを備えたカーボンファイバー フレームにより、簡単で簡単な取り付けが可能
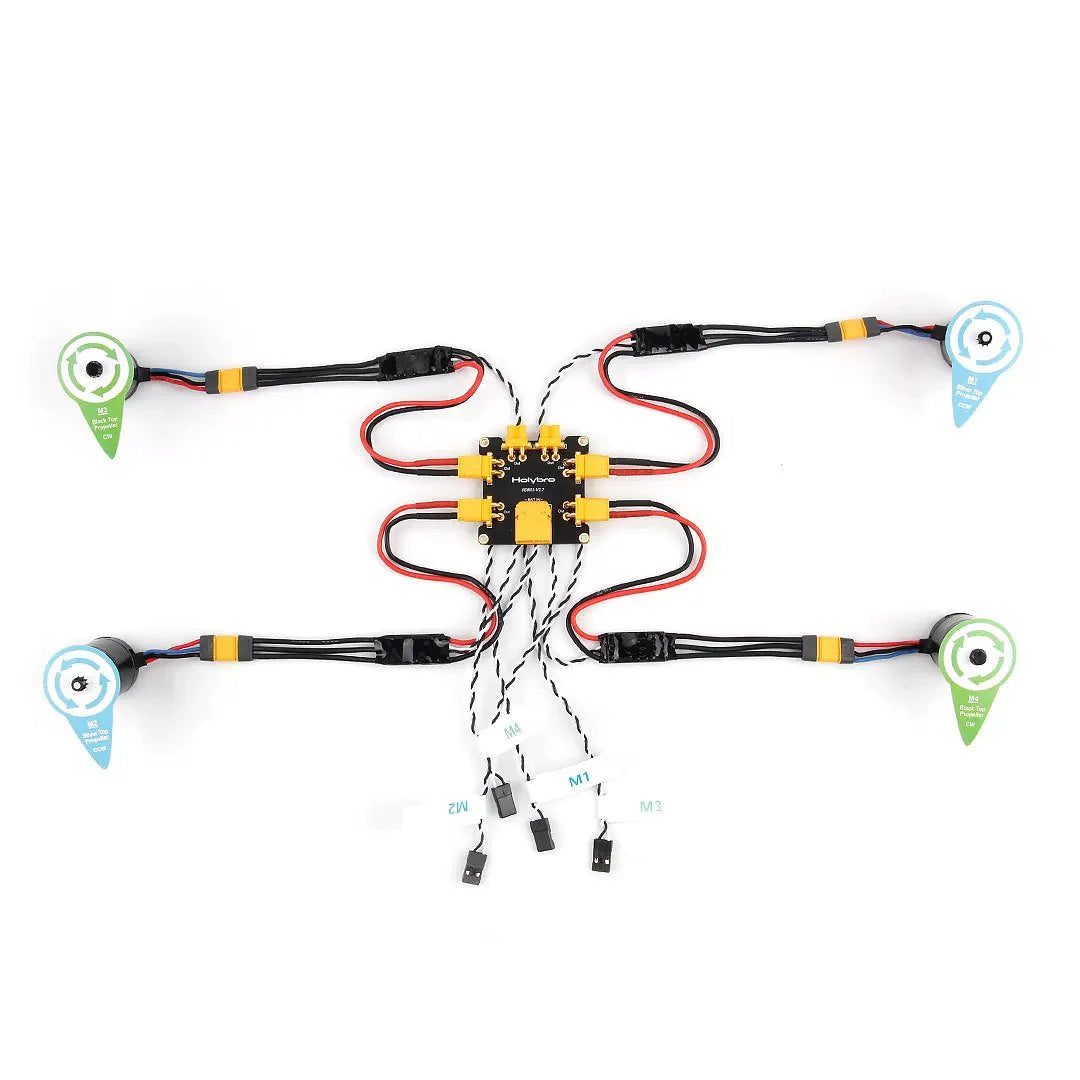
- PDB 用のシンプルな XT30 電源プラグを備えたプレインストールされたモーターと ESC
- XT60 および XT30 プラグ付き配電盤 (PDB)
- Raspberry Pi や Nvidia Jetson Nano などのコンパニオン コンピューター用マウント
- Intel RealSense および Structure Core 用のオプションの深度カメラ マウント
注:
- Pixhawk 6X バージョンには、PM02D-HV (高電圧) バージョンが同梱されるようになりました。 PX4 でこれを有効にするには、SENS_EN_INA228を設定する必要があります。 この HV バージョンは、ardupilot 4.4 以降でのみサポートされます。セットアップ ガイドはこちら でご覧いただけます。
-
M10 GPS のファームウェア サポート: PX4 1.14 および ArduPilot 4.3 以降が必要です。
PX4 開発キット - X500 v2 内容:
- オートパイロット フライト コントローラー: Pixhawk 6C (プラスチック ケース) & PM02 V3 または Pixhawk 6X (標準ベース) & PM02D
- M10 GPS モジュール
- SiK テレメトリ無線 V3 433/915MHz
- X500 V2 フレーム キット (SKU30120)
-
プリインストールされた項目:
- モーター - Holybro 2216 KV920 モーター (4 個) XT30 プラグ付き (モーターの仕様はここでご覧いただけます)
- ESC - BLHeli S ESC 20A (4 個) XT30 プラグ付き - 4S バッテリーと互換性あり
- 1045 プロペラ (6 個)
- 配電基板(バッテリ用の XT60 プラグ、ESC および周辺機器用の XT30 プラグ)
-
その他のオプション品(別売り)
- ラジオマスター TX16S RC コントローラー
- ラジオマスター R81 レシーバー
- 深度カメラ マウント
X500 V2 フレーム キットの詳細 (SKU30120):
- 本体 - フルカーボンファイバー製の上部および底部プレート (144 x 144mm、厚さ 2mm)
- アーム - 高強度かつ超軽量の 16 mm カーボンファイバー チューブ、新設計の繊維強化ナイロン コネクタ付き
- 着陸装置 - 強化および改良されたプラスチック T コネクタを備えた直径 16 mm および 10 mm のカーボンファイバー チューブ。
- プラットフォーム ボード - GPS および Raspberry Pi 4 や Jetson Nano などの人気のコンパニオン コンピューター用の取り付け穴付き
- デュアル 10 mm Ø ロッド x 250 mm 長レール取り付けシステム
- バッテリー マウント、バッテリー ストラップ 2 本付き
- 取り付け用の手動工具
機械仕様:
- ホイールベース: 500mm
- モーター マウント パターン: 16x16mm
- フレーム本体: 144x144mm、厚さ 2mm
- ランディングギア高さ: 215mm
- 上下板間隔:28mm
- 重量: 610g
- 飛行時間: 追加のペイロードなしで約 18 分間ホバリングします。 5000mAh バッテリーでテスト済み。
- ペイロード: 1500g (バッテリーなし、スロットル 70%)
- 推奨バッテリー: 4S 3000-5000mAh 20C+ XT60 Lipo バッテリー付き (別売り)

X500 v2 アセンブリ ガイド
参照:
モーター仕様
3D プリント:
Holybro_X500_V2_3D プリントセットアップ ガイド:
アイドロボティクスの記事
PX4 セットアップ ガイド
Ardupilot セットアップ ガイド
いくつかのヒント: