



インスパイアロボット RH56BFX 多指ロボットハンド 6自由度・12関節・力覚センサー内蔵・3kg出力・産業用&研究向け
インスパイアロボット RH56BFX 多指ロボットハンド 6自由度・12関節・力覚センサー内蔵・3kg出力・産業用&研究向け
Inspire Robots
受取状況を読み込めませんでした
概要
RH56BFXシリーズデクスタラスロボットハンドは、高速・高精度の5本指ロボットハンドで、人間のような動きと多様な用途に対応するように設計されています。6自由度と12関節を備え、インタラクティブなデモンストレーション、ジェスチャーシミュレーション、複雑な操作タスクのために自然な手の動きを再現します。統合された力センサーと触覚センサーにより、正確な制御と適応性が確保されており、産業、商業、研究環境に適しています。
主な特徴
-
人間のようなサイズと構造 – 自然なインタラクションのために成人の手の寸法を模倣しています。
-
統合された力センサーと触覚センサー – 正確なグリップ力と敏感なタッチフィードバックを可能にします。
-
高速応答 – 最大指曲げ速度 570°/s を実現し、機敏な操作をサポートします。
-
サブミリメートル位置決め – ±0.20 mm の繰り返し精度により、安定した正確な動作を保証します。
-
高出力強度 – 単指出力は最大 3 kg、最大グリップ力は 6 N です。
-
耐久性 – 100万回以上の動作サイクルに対応するよう設計されています。
-
産業用グレードインターフェース – RS485通信および24V DC電源入力により、シームレスな統合が可能です。
技術仕様
| パラメータ | 仕様 |
|---|---|
| シリーズ | RH56BFX |
| モデル | RH56BFX-2L (左) / RH56BFX-2R (右) |
| 自由度 | 6 |
| 関節数 | 12 |
| 重量 | 540 g |
| 制御インターフェース | RS485 |
| 動作電圧 | DC 24V ±10% |
| 静的電流 | 0.2 A |
| 最大電流 | 2 A |
| 繰り返し位置決め精度 | ±0.20 mm |
| 最大グリップ力 – 親指 | 6 N |
| 最大グリップ力 – 四本指 | 4 N |
| グリップ力分解能 | 0.50 N |
| 親指の回転範囲 | >65° |
| 親指のスイング速度 | 235°/s |
| 親指の曲げ速度 | 150°/s |
| 四本指の曲げ速度 | 570°/s |
用途
RH56BFX巧妙な手は、以下の幅広い分野に適しています:
-
ウェルカムレセプション – ゲストを迎えるための人間とロボットのインタラクション。
-
無人小売 – 自動化された店舗でのアイテムのピッキングと配置。
-
ビルサービス – サービス環境でのスイッチ、ノブ、ツールの操作。
-
家庭サービス – 日常の家事を手伝う。
-
高齢者および障害者支援 – 必要な方々へのサポートと交流を提供します。
-
特殊産業 – 専門的または危険な環境での複雑な操作。
詳細

Biohand RH56BFX 巧妙な ロボットハンド、より速い速度、精密作業のための先進的なデザイン。

6自由度、12関節、サブミリメートルの再現性、力センサー、数kgの荷重容量を持つ巧妙なロボットハンド。

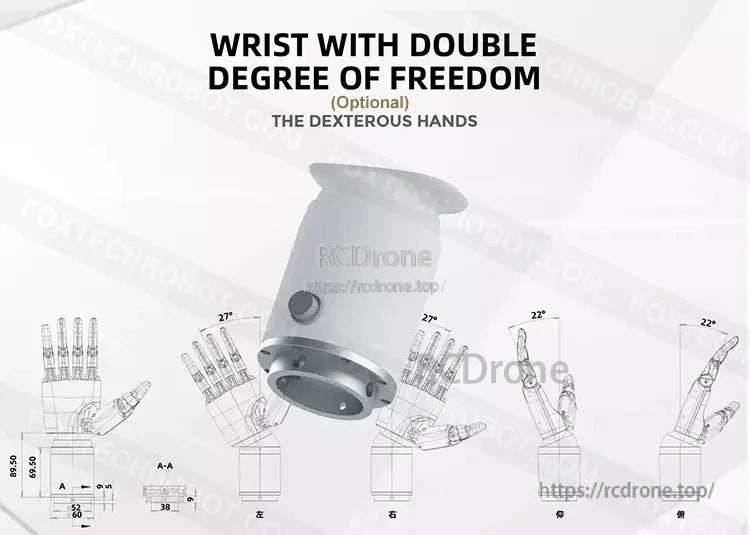
二重自由度の手首、オプションの巧妙なハンド、27°および22°の回転角度、詳細な技術図面付き。

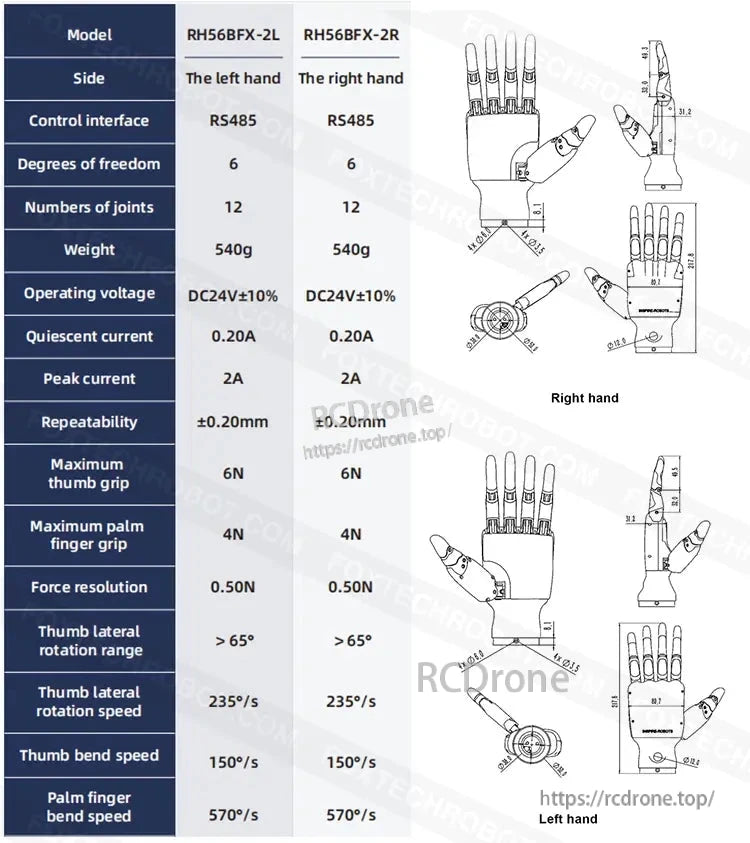
Inspire Robots RH56BFX 巧妙なロボットハンドは、6自由度、12関節、±0。20mmの再現性、540gの重量、DC24Vの動作、6Nのサムグリップ、4Nのパームグリップ、0.50Nの力解像度をサポートし、高速の横回転と両手用の曲げ動作が可能です。
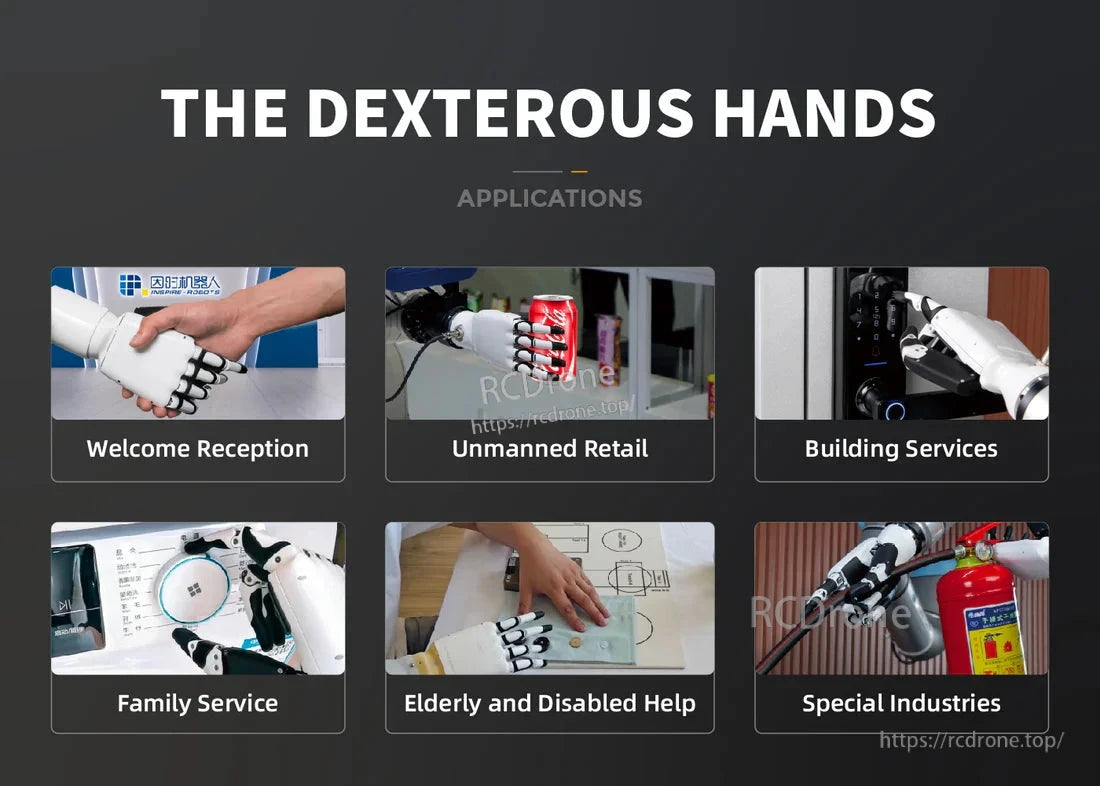
受付、小売、サービス、家庭、高齢者支援、特別な産業における巧妙なロボットハンドの応用。
Related Collections



