


インスパイアロボット RH56DFTP 器用ロボットハンド – 6軸、30Nグリップ、触覚&力センサー、ModbusTCP+CAN制御
インスパイアロボット RH56DFTP 器用ロボットハンド – 6軸、30Nグリップ、触覚&力センサー、ModbusTCP+CAN制御
Inspire Robots
受取状況を読み込めませんでした
概要
Inspire Robots RH56DFTP インテリジェントバイオニックロボットハンドは、高精度の五指の巧妙な手で、先進的なロボットアプリケーション向けに設計されています。6自由度、12関節、および6つの力センサーと17の触覚センサーの組み合わせを特徴とし、人間のような巧妙さと触覚認識を提供します。指先の力は30N(約3 kg/指)で、高速の角運動とシームレスなModbusTCP+CAN (RS485)通信を実現しており、このハンドは研究、産業オートメーション、バイオニックロボティクスに最適です。
主な特徴
-
人間のような触覚精度:統合された触覚センサーがリアルタイムの認識を提供し、正確な物体操作を可能にします。
-
強力で安定したグリップ:各指は最大3 kgの駆動力を提供し、さまざまな物体を確実に把握できます。
-
電源喪失時の自己ロック: 電源が切れても位置を保持し、起動時の再ゼロ設定が不要です。
-
高速動作: サムの動きは 130°/s を超え、四指の動きは 200°/s に達し、応答性の高い制御を実現します。
-
耐久性と信頼性: 研究室、ロボットプラットフォーム、産業環境での長期使用に適しています。
仕様
| パラメータ | 値 |
|---|---|
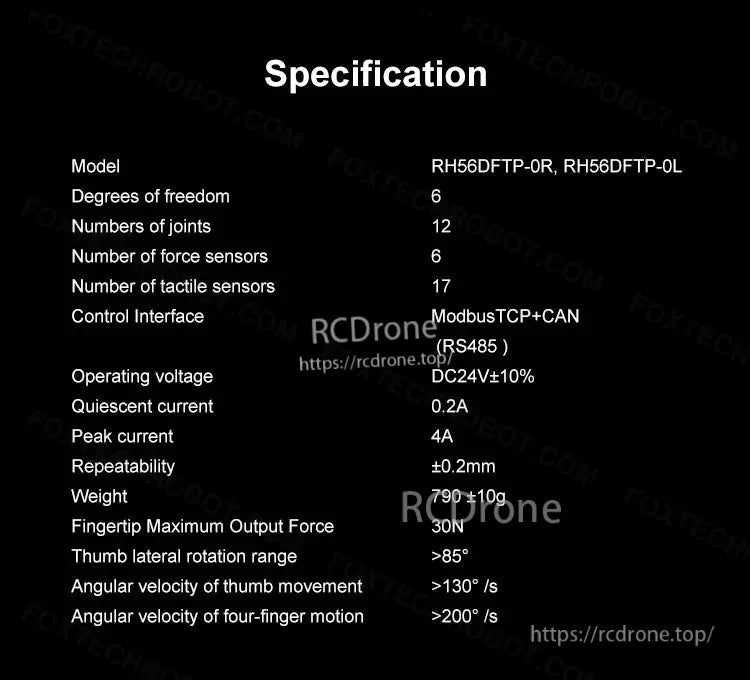
| モデル | RH56DFTP-0R, RH56DFTP-0L |
| 自由度 | 6 |
| 関節数 | 12 |
| 力センサー | 6 |
| 触覚センサー | 17 |
| 制御インターフェース | ModbusTCP + CAN (RS485) |
| 動作電圧 | DC 24V ±10% |
| 静流電流 | 0.2A |
| ピーク電流 | 4A |
| 繰り返し精度 | ±0.2mm |
| 重量 | 790g ±10g |
| 指先の最大出力力 | 30N (≈3 kg) |
| 親指の横回転範囲 | >85° |
| 角速度 – 親指 | >130°/s |
| 角速度 – 四本の指 | >200°/s |
用途
-
研究開発: 大学や研究所における先進的なロボティクス研究。
-
産業オートメーション: 高精度な組立および取り扱い作業。
-
バイオニックソリューション: 義手の研究およびヒューマノイドロボティクス。
-
AIと機械学習: 正確なリアルタイムフィードバックを必要とする触覚センシングおよび操作プロジェクト。
ハイライト
RH56DFTPは、ブルーベリー、チェリートマト、またはブドウを傷つけることなく摘むなど、精密な力の制御と繊細な操作を必要とするタスクにおいて優れた性能を発揮します。また、堅牢な産業用途における高力グリッピングもこなすため、複雑な操作タスクに対する多用途なソリューションとなっています。
詳細
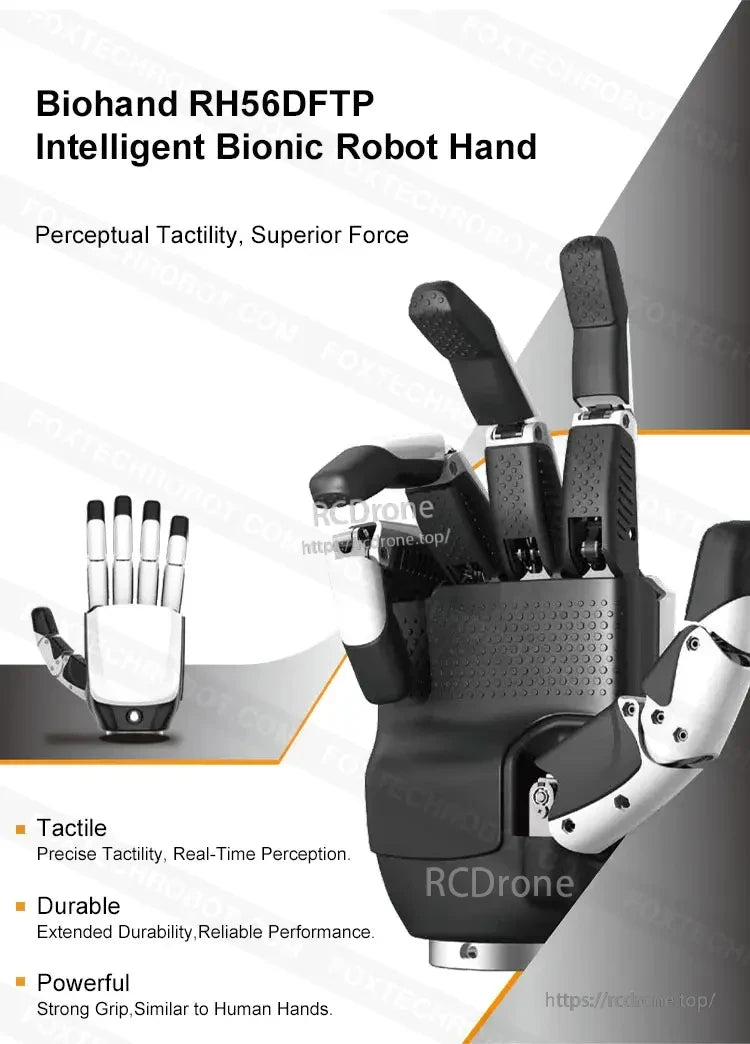
Biohand RHS6DFTPインテリジェントバイオニックロボットハンドは、知覚的触覚、優れた力、リアルタイムでの精密な触覚を提供し、信頼性の高いパフォーマンスのために耐久性を延ばし、人間の手に似た強力なグリップを実現します。

6自由度のロボットハンドは、精度と器用さを考慮して設計されており、手術、組立、または実験室作業など、さまざまな用途に最適です。

強力なグリップ、人間のようなパフォーマンス。指ごとに3kgの作動力。高度なデザインと精密工学を備えた器用なロボットハンド。


電力損失自己ロック機構により、起動時やシャットダウン時に再ゼロ設定を必要とせず、位置を安定かつ信頼性高く保持します。


力センサーを備えた多機能ハンドツールで、ブルーベリー、ミニトマト、ブドウなどの小さな果物をつかんだり、つまんだりするのに適しています。

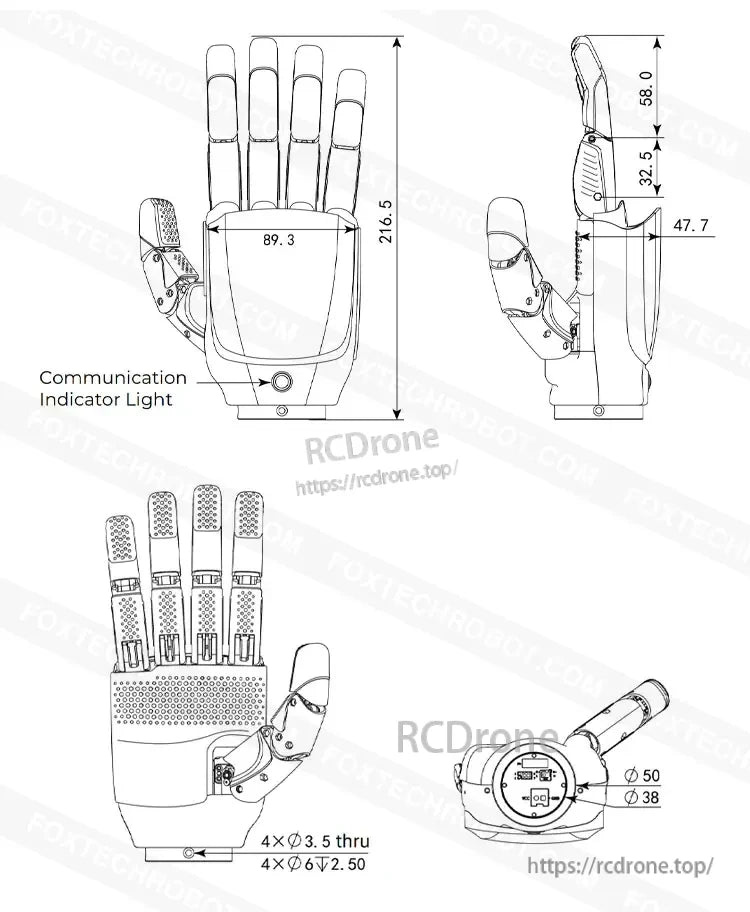
通信インジケーターライト、8 x 47.7 mm、89 mmの長さ、LEDなし、5x5: 38-4x03.5から4xp6v2、50オーム、2層
RHS6DFTP-ORおよびRHS6DFTP-OL仕様モデルは、3自由度、12関節、17の力センサーおよび触覚センサーを特徴としています。DC24V +10%の動作電圧を持つModbus TCP+CAN (RS485)制御インターフェースを使用しています。



Related Collections


