

JUXIE INTELLIGENT CE-HM-R120シリーズ ロボットモーター、48V、51:1/101:1/161:1、最大600Nm、デュアルエンコーダ、EtherCAT/CAN
JUXIE INTELLIGENT CE-HM-R120シリーズ ロボットモーター、48V、51:1/101:1/161:1、最大600Nm、デュアルエンコーダ、EtherCAT/CAN
JUXIE INTELLIGENT
通常価格
$2,856.00 USD
通常価格
セール価格
$2,856.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
JUXIE INTELLIGENT CE-HM-R120シリーズは、人型およびモバイルロボティクス向けの高トルクロボットモータープラットフォームです。このシリーズは、複数のギア構成(51:1、101:1、161:1)と高出力のCE-HM-R120Maxバリアントを提供します。デュアルエンコーダー(19ビットシングルターン)と、50KHzの電流ループおよび10KHzの速度ループを備えたEtherCAT/CANドライバーを統合しています。典型的な使用例には、人型ロボットやロボットアームの肩、腰、股関節が含まれ、コンパクトな寸法はR120*78.5mmまたはR120*100mmで、全体の重量は2.5kgから4kgです。
主な特徴
- 構成: 51:1、101:1、161:1; CE-HM-R120Maxは161:1で。
- 定格トルク最大300 Nm; ピークトルク最大600 Nm。
- 低バックラッシュ: 15アーク秒(R120バリアント)、30アーク秒(R120Max)。
- シングルターン絶対19ビットのデュアルエンコーダー。
- ドライバーインターフェース: EtherCAT/CAN; 電流ループ50KHz; 速度ループ10KHz。
- 定格電圧 48 V; 定格出力 最大 1166.4 W。
- コンパクトな寸法 R120*78.5mm または R120*100mm; 重量 2.5kg から 4kg。
- 分解図の証拠は、シリーズ全体にわたるハーモニックリデューサー、フレームレストルクモーター、および完全な中空シャフト設計を示しています。
仕様
| パラメータ | CE-HM-R120 (51:1) | CE-HM-R120 (101:1) | CE-HM-R120 (161:1) | CE-HM-R120Max (161:1) |
|---|---|---|---|---|
| 出力速度 (RPM) | 49 | 20 | 12 | 11 |
| 定格トルク (Nm) | 66 | 131 | 200 | 300 |
| ピークトルク (Nm) | 165 | 300 | 500 | 600 |
| バックラッシュ (arcsec) | 15 | 15 | 15 | 30 |
| 定格電圧 (V) | 48 | 48 | 48 | 48 |
| 定格出力 (W) | 732 | 732 | 732 | 1166.4 |
| 定格回転数 (RPM) | 3500 | 3500 | 3500 | 1800 |
| 定格電流 (A) | 15 | 15 | 15 | 24.3 |
| ピーク電流 (A) | 45 | 45 | 45 | 93 |
| エンコーダ | デュアルエンコーダ; 単回転絶対19ビット/t回転 | デュアルエンコーダ; 単回転絶対19ビット/t回転 | デュアルエンコーダ; 単回転絶対19ビット/t回転 | デュアルエンコーダ; 単回転絶対19ビット/t回転 |
| ドライバ | インターフェース: EtherCAT/CAN; 電流ループ: 50KHz; 速度ループ: 10KHz | インターフェース: EtherCAT/CAN; 電流ループ: 50KHz; 速度ループ: 10KHz | インターフェース: EtherCAT/CAN; 電流ループ: 50KHz; 速度ループ: 10KHz | インターフェース: EtherCAT/CAN; 電流ループ: 50KHz; 速度ループ: 10KHz |
| 全体寸法 | R120*78.5mm | R120*78.5mm | R120*78.5mm | R120*100mm |
| 全体重量 | 2.5kg | 2.5kg | 2.5kg | 4kg |
| 典型的な用途 | 肩関節、股関節、腰関節 | 肩関節、股関節、腰関節 | 肩関節、股関節、腰関節 | 肩関節、股関節、腰関節 |
用途
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
マニュアル
詳細
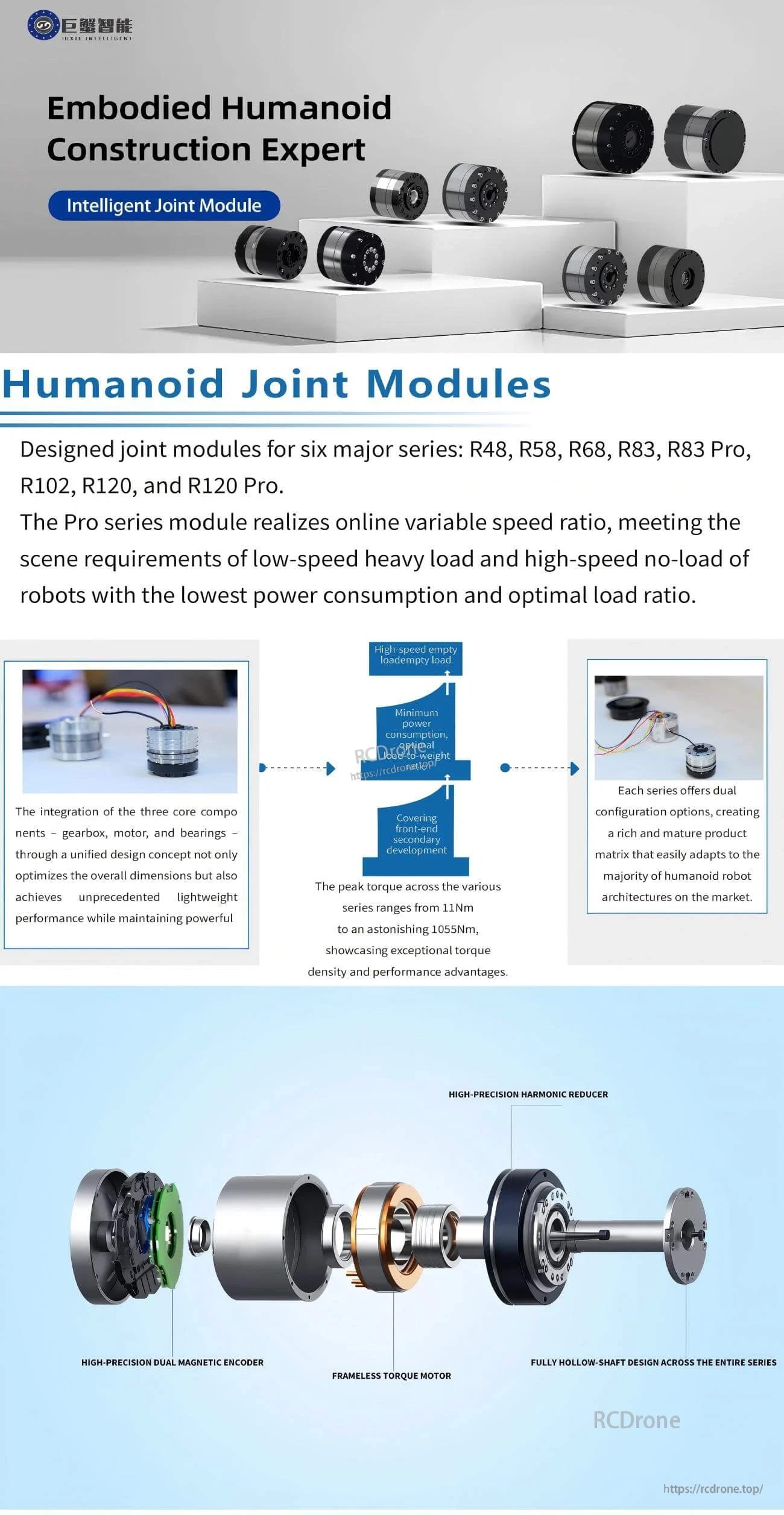
R48、R58、R68、R83、R83 Pro、R102、R120、およびR120 Proシリーズのヒューマノイド関節モジュール。特徴には、高精度ハーモニックリデューサー、デュアルマグネティックエンコーダ、フレームレストルクモーター、完全な中空シャフト設計が含まれます。可変速度比、低消費電力、高トルク密度を提供します。


Related Collections

