

JUXIE INTELLIGENT CE-HM-R68シリーズ、48V 175W、51:1/101:1、17/33Nm、19ビットデュアルエンコーダ搭載ロボット関節用モーター
JUXIE INTELLIGENT CE-HM-R68シリーズ、48V 175W、51:1/101:1、17/33Nm、19ビットデュアルエンコーダ搭載ロボット関節用モーター
JUXIE INTELLIGENT
通常価格
$2,040.00 USD
通常価格
セール価格
$2,040.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
JUXIE INTELLIGENT CE-HM-R68シリーズは、人型および移動ロボティクス用に設計されたコンパクトなロボットモーターおよびジョイントモジュールです。48 Vサーボドライブ、デュアルエンコーダー、51:1または101:1のギア比を統合し、ロボットジョイントに対して最大33 Nmの定格トルクと最大82 Nmのピークトルクを提供します。
主な特徴
- 2つの構成:51:1および101:1のギア比
- 定格出力速度:60 RPM(51:1)、30 RPM(101:1)
- 定格トルク:17 Nm(51:1)、33 Nm(101:1);ピークトルク最大41/82 Nm
- 低バックラッシュ:15アーク秒
- 48 V、175 Wサーボ、3000 RPMの定格モーター速度
- 単回転絶対19ビット解像度のデュアルエンコーダー
- インターフェース:EtherCAT/CAN;制御ループ:電流50 kHz、速度10 kHz
- コンパクトサイズ R68 x 66.3 mm;重量 0。8 kg
- ヒューマノイドロボットの肩、肘、膝、腰の関節に適しています
仕様
| パラメータ | 51:1 | 101:1 |
|---|---|---|
| 出力速度 (RPM) | 60 | 30 |
| 定格トルク (Nm) | 17 | 33 |
| ピークトルク (Nm) | 41 | 82 |
| バックラッシュ (arcsec) | 15 | 15 |
| 定格電圧 (V) | 48 | 48 |
| 定格出力 (W) | 175 | 175 |
| 定格モーター速度 (RPM) | 3000 | 3000 |
| 定格電流 (A) | 5.5 | 5.5 |
| ピーク電流 (A) | 16 | 16 |
| エンコーダ | デュアルエンコーダ; 単回転絶対19ビット | |
| ドライバーインターフェース | EtherCAT/CAN | |
| 制御ループ | 電流ループ 50 kHz; 速度ループ 10 kHz | |
| 全体寸法 | R68 x 66.3 mm | |
| 全体重量 | 0.8 kg | |
| 典型的な関節の用途 | 肩、肘、膝、腰 | |
用途
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
マニュアル
詳細
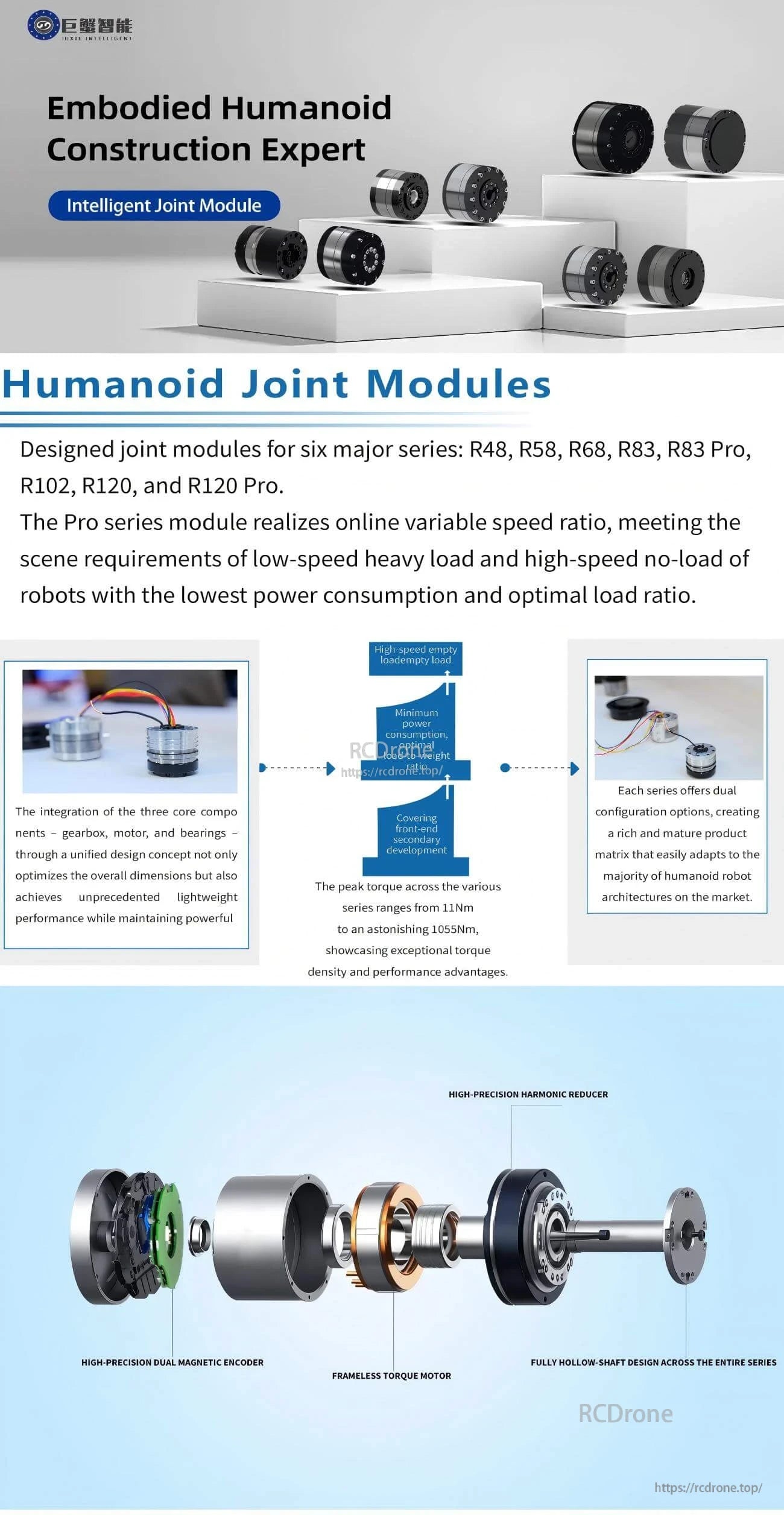
R48、R58、R68、R83、R83 Pro、R102、R120、およびR120 Proシリーズのヒューマノイド関節モジュール。特徴には、高精度ハーモニックリデューサー、デュアルマグネティックエンコーダ、フレームレストルクモーター、完全な中空シャフト設計が含まれます。可変速度比、低消費電力、高トルク密度を提供します。

ロボットモーターシリーズ:R48(外径48mm、トルク4Nm、100 PRM)、R58(外径58mm、トルク8Nm、90 PRM)、R68(外径68mm、トルク5Nm、90 PRM)。すべてEtherCAT/CANインターフェースを備えています。

Related Collections

