













LINKERBOT リンカー ハンド L10 ロボットハンド、10自由度、CAN/RS485制御、ウォームギア駆動、80Nグリップ、DC24V±10%
LINKERBOT リンカー ハンド L10 ロボットハンド、10自由度、CAN/RS485制御、ウォームギア駆動、80Nグリップ、DC24V±10%
LINKERBOT
受取状況を読み込めませんでした
概要
LINKERBOT Linker Hand L10は、巧妙な操作と正確な制御のために設計されたロボットハンドです。10自由度を持ち、ワームギア伝動を採用しており、信頼性の高い研究および産業システムへの統合のためにCAN/RS485を介して通信します。
主な特徴
- 安定した作動のためのワームギア伝動を備えた10自由度の巧妙なハンド。
- 制御インターフェース:CANおよびRS485。
- 繰り返し位置決め精度 < +/-0.2mm; 一般的な開閉時間 1.2秒。
- 力の能力:最大15Nの親指先端力、最大15Nの四指先端力、最大80Nの五指把持力。
- 製品マニュアルからの制御モードとユーティリティ:位置制御、速度制御、指先センサーによる触覚フィードバック(力制御)、およびオンラインファームウェアアップグレード。
- エコシステム(製品材料ごと):サポートされているロボットアーム UR、Franka、XArm、RealMan、AgileX;サポートされているシミュレーター Pybullet、Isaac、MuJoCo;使用例には ROS1、ROS2、Python、C++ が含まれます;データ取得方法にはテレオペレーショングローブ、エクソスケルトングローブ、液体金属センサーグローブ、ビジョン、VR(Meta Quest 3)が含まれます。
プレセールまたは統合サポートについては、[email protected] orに連絡するか、https://rcdrone.top/を訪問してください。
仕様
| 自由度 (DoF) | 10 |
| 関節数 | 20 (10 アクティブ + 10 パッシブ) |
| 伝達モード | ワームギア伝達 |
| 制御インターフェース | CAN/RS485 |
| 重量 | 800g |
| 最大荷重 | 25kg |
| 動作電圧 | DC24V+/-10% |
| 静的電流 | 0.2A |
| 平均電流 (無負荷動作) | 0.5A |
| 最大電流 | 3A |
| 再現位置精度 | < +/-0.2mm |
| 開閉時間 | 1.2s |
| 最大サムフィンガーチップ力 | 15N |
| 最大四指フィンガーチップ力 | 15N |
| 最大五指把持力 | 80N |
圧力センサー
| ピエゾ抵抗アレイ | 6*12 |
| センサー荷重面積 | 9.6*14.4mm |
| トリガー力 | 5g |
| 測定範囲 | 20N |
| サービス寿命 | 100,000サイクル |
| 通信フレームレート | 200FPS |
静電容量センサー(オプション)
| サンプリング周波数 | >=50Hz |
| 測定範囲 | 0-30N |
| 過負荷限界 | 60N |
| 圧力感度 | 0.1N |
| 測定解像度 | 0.5%FS |
| 測定精度 | 2%FS |
| 圧力解像度 | 0.25N |
| 方向解像度 | 45° |
| 検出距離 | 1cm(金属、人間の体) |
同梱物
- USB-to-CANデバッグケーブル x1
- コネクタケーブル XT30 (2+2) x1
- 電源アダプター x1
- 電源ケーブル x1
- リンカー ハンド L10 x1
アプリケーション
- ROS1/ROS2およびシミュレーター(Pybullet、Isaac、MuJoCo)を使用した巧妙な操作の研究と教育。
- 手袋、外骨格手袋、液体金属センサー手袋、視覚、VR(Meta Quest 3)を介した遠隔操作。
- 精密組立、経路ベースの操作、ネジ締め、薄いシートの把持、一般的な物体の取り扱い。
マニュアル
Linker_Hand_L10_Product_Manual.pdf
詳細

Linker Hand L10は10自由度を提供し、リンク機構とカスタムモータードライバーを介して精密な動作を実現します。UR、Franka、ROS、Python、VR、Pybullet、CANなどをサポートし、多様なロボット統合と制御を可能にします。
Linker Hand L10は高い器用さを提供し、各指は精密な操作のために4自由度を持っています。カメラと電子皮膚を備えたマルチセンサーシステムは、包括的な環境認識と適応的な相互作用を提供します。エンドクラウド統合を通じて、ユーザーはコード不要のスキルライブラリクラウドサービスを介して手を迅速に展開でき、効率的なカスタマイズを実現しながら運用の複雑さを軽減します。これらの機能は、広範な複雑なアプリケーションをサポートし、精度と使いやすさを向上させ、広範なプログラミングやセットアップを必要としません。

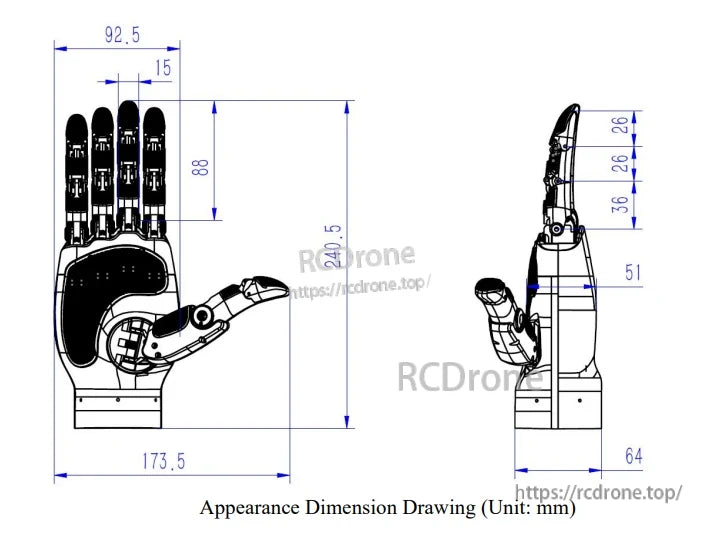
ロボットハンドの寸法(ミリメートル単位)、設計と組み立てのための正確な測定値を示す前面および側面ビュー。
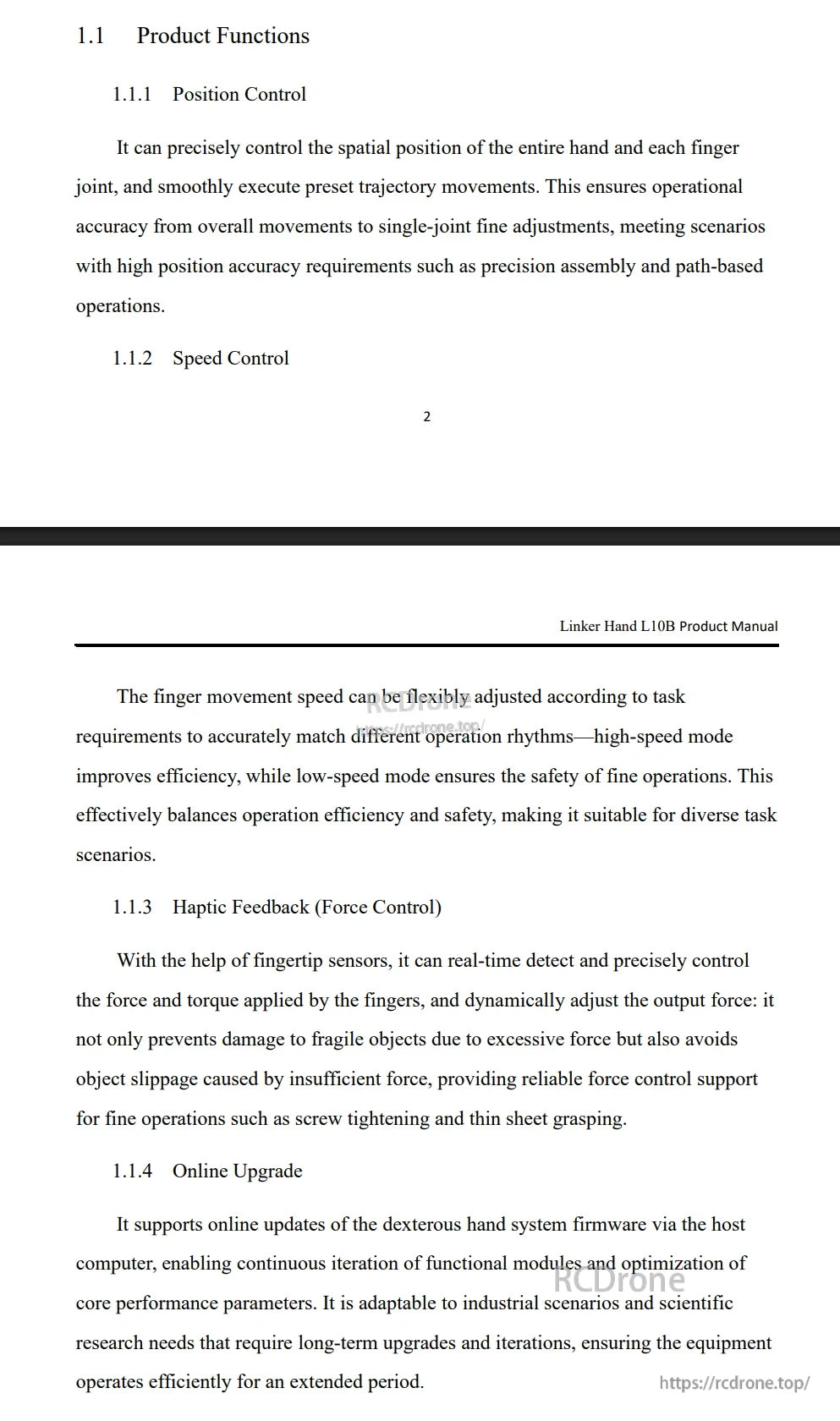
Linker Hand L10Bは、正確な位置と速度制御、力管理のための触覚フィードバック、オンラインファームウェアアップグレードを提供します。精度、安全性、適応性を考慮して設計されており、微細な操作と長期的なパフォーマンスを必要とする産業および研究用途に最適です。
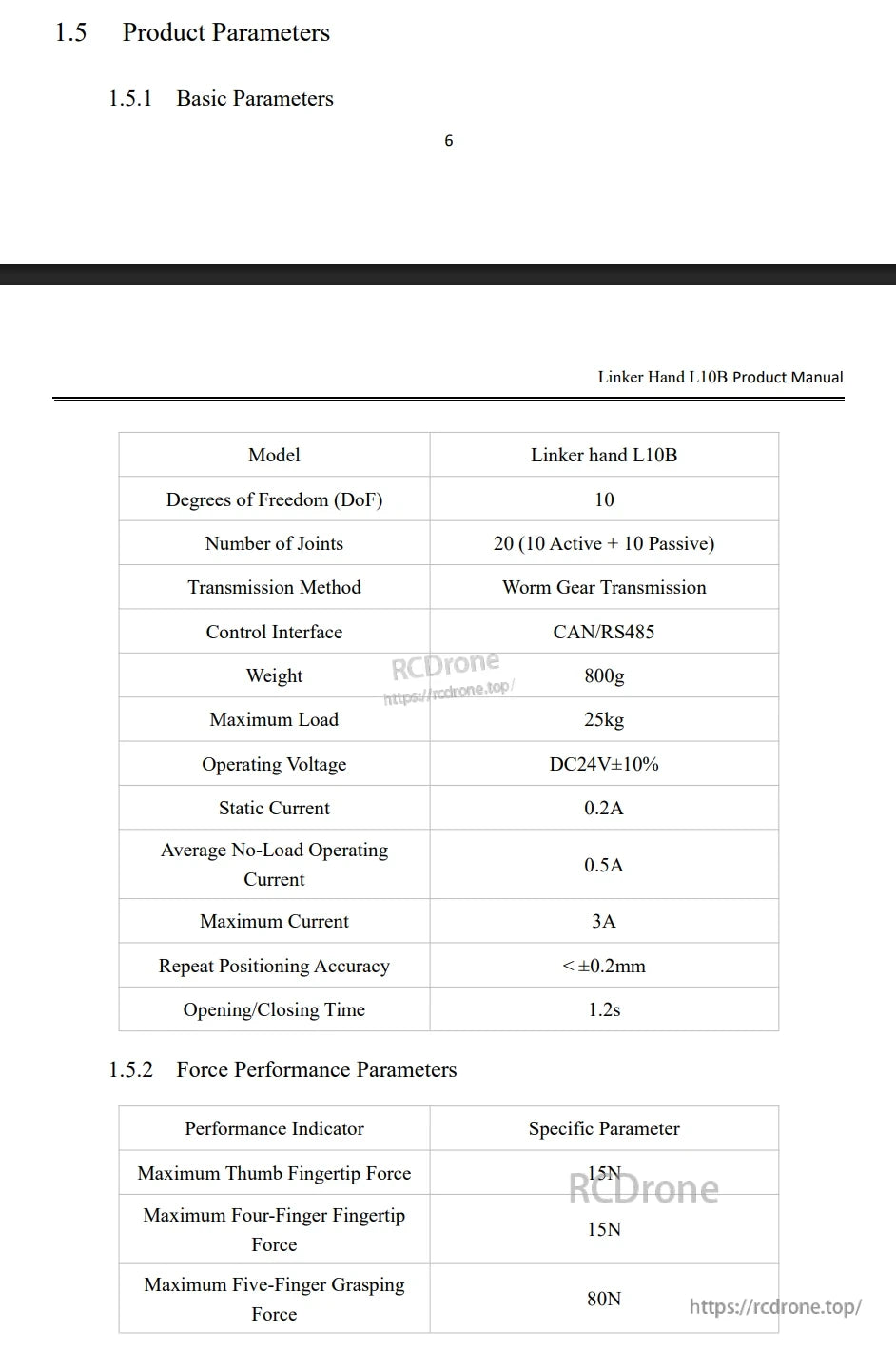
Linker Hand L10Bは、10自由度、20関節、ワームギア伝達、CAN/RS485制御を提供します。重さは800gで、DC24Vで最大25kgを扱い、最大80Nの正確な位置決めと把持力を提供します。

6x12の圧電抵抗アレイ(20N範囲、100kサイクル)を特徴としています。オプションの静電容量センサー:≥50Hzサンプリング、0–30N範囲、45°方向解像度、金属または人体を1cmで検出します。
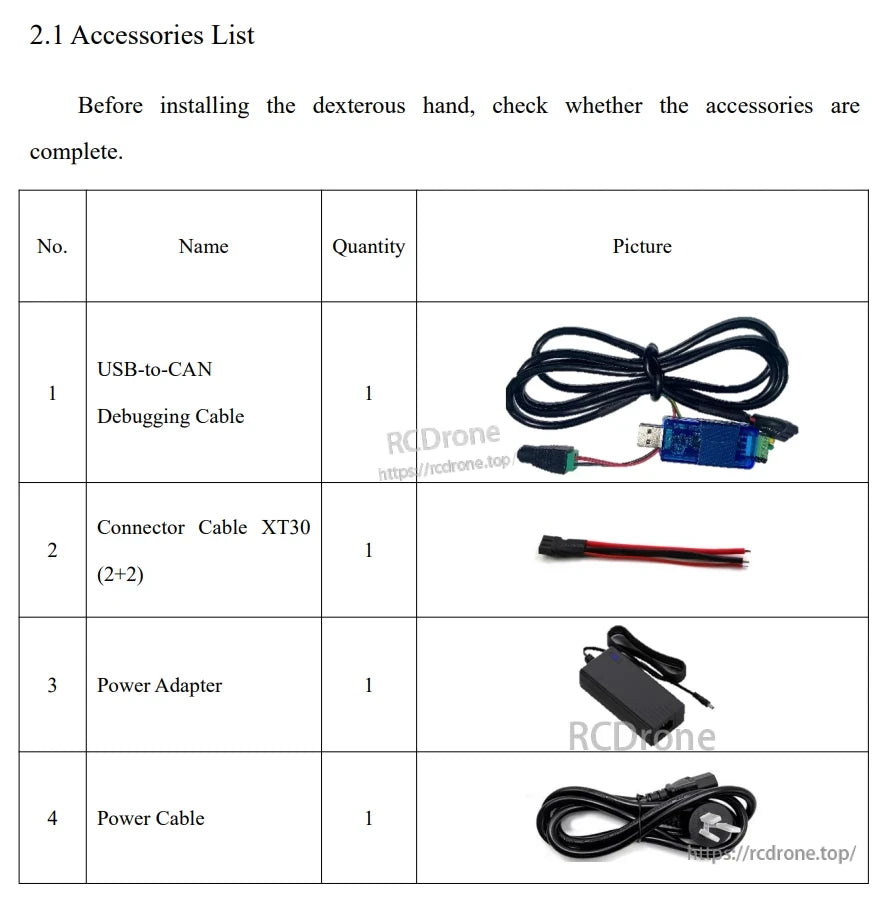
器用な手の取り付け用アクセサリーリスト:USB-to-CANケーブル、XT30コネクタ、電源アダプタ、電源ケーブル、各1個。













