







LINKERBOT Linker Hand L6 ロボットハンド、6自由度、CAN、リンク駆動、50N把持力、±0.2mm繰返し精度
LINKERBOT Linker Hand L6 ロボットハンド、6自由度、CAN、リンク駆動、50N把持力、±0.2mm繰返し精度
LINKERBOT
受取状況を読み込めませんでした
概要
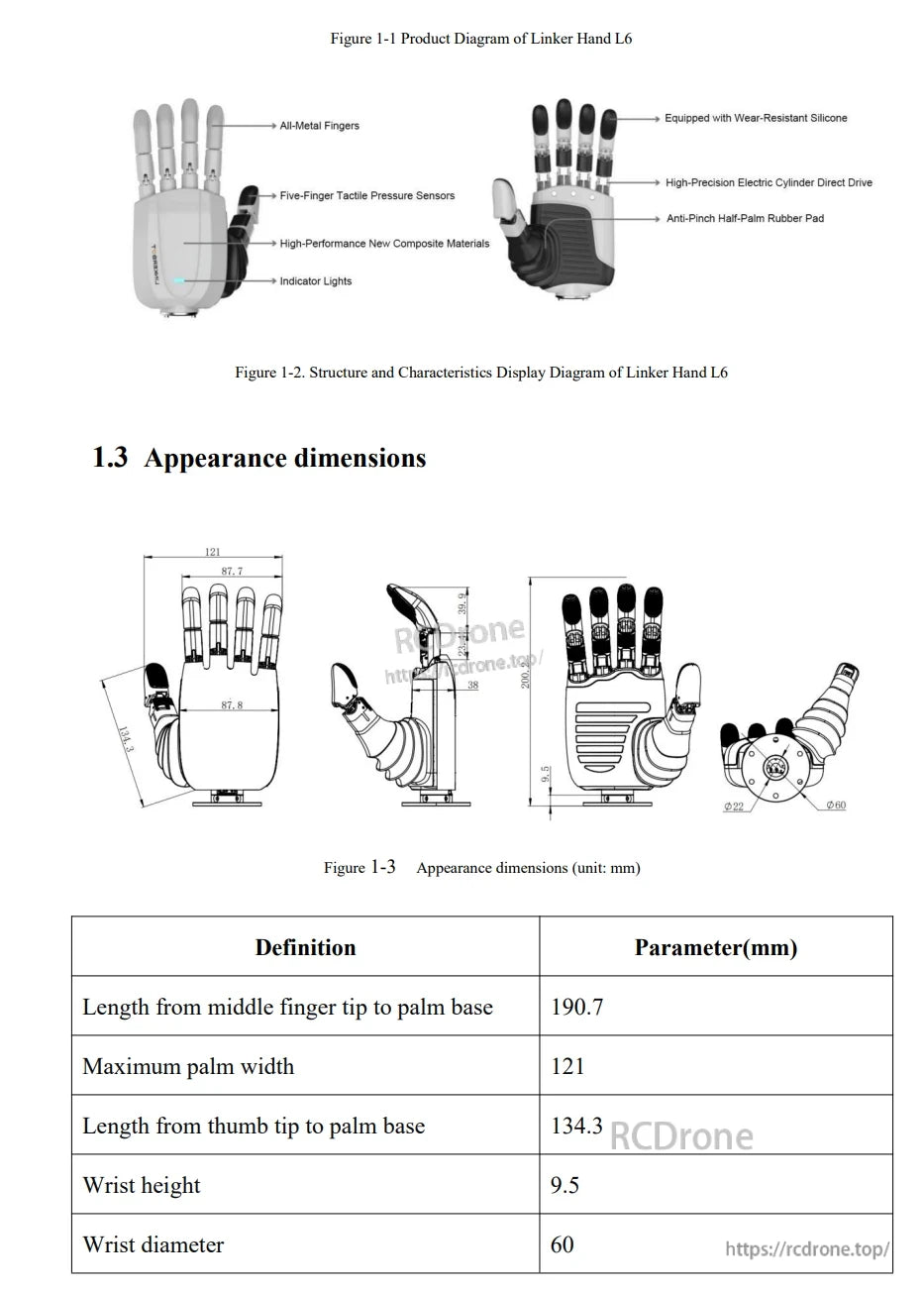
LINKERBOT Linker Hand L6は、精密な操作のために設計された巧妙なロボットハンドです。6自由度(DoF)と11の関節(6つのアクティブ + 5つのパッシブ)を備え、リンク伝達とCAN制御インターフェースを特徴としています。製品画像に示されている構造は、全金属製の指、指先に耐摩耗性シリコン、5本指の触覚圧力センサー、インジケーターライト、挟み込み防止のハーフパームゴムパッド、高精度の電動シリンダー直結駆動を強調しています。
主な特徴
- 6 DoFの巧妙な操作; 11の関節(6つのアクティブ + 5つのパッシブ)。
- CANバス制御によるリンク伝達。
- 繰り返し位置決め精度: ±0.2mm。
- 力の能力:親指の最大先端力10N;四本の指の最大先端力8N;最大五指の把持力50N。
- 接触/圧力測定用のピエゾ抵抗性五指触覚センサーアレイ。
- 表示されているデザイン要素:全金属製の指、耐摩耗性シリコン先端、インジケーターライト、挟み込み防止ゴムパッド。
- コンパクトで&機敏なレイアウト;製品画像に示されているように、マルチセンサーシステム(カメラや電子皮膚を含む)およびデバイス-クラウド統合。
販売および技術サポートについては、[email protected] orに連絡するか、https://rcdrone.top/を訪問してください。
仕様
| パラメータ | 値 |
|---|---|
| 自由度 (DoF) | 6 |
| 関節数 | 11 (6 アクティブ + 5 パッシブ) |
| 伝達モード | リンク伝達 |
| 制御インターフェース | CAN |
| 重量 | 623.5g |
| 最大荷重 | 28kg |
| 動作電圧 | DC24V±10% |
| 静的電流 | 0.2A |
| 平均電流 (無負荷動作) | 0.75A |
| 最大電流 | 1.4A |
| 繰り返し位置決め精度 | ±0.2mm |
| 親指の最大先端力 | 10N |
| 四本の指の最大先端力 | 8N |
| 五本の指の最大把持力 | 50N |
動作性能
| 動きの部分 | 角度範囲 (°) | 動きの速度 (°/s) |
|---|---|---|
| 親指の基部 | 57 | 152.82 |
| 人差し指の基部 | 72.30 | 213.27 |
| 中指の基部 | 72.90 | 208.29 |
| 薬指の基部 | 73.10 | 202.49 |
| 小指の基部 | 72.60 | 201.11 |
| 親指の先端 | 69.90 | 192.84 |
| 人差し指の先端 | 64.60 | 192.84 |
| 中指の先端 | 65.10 | 185.32 |
| 薬指の先端 | 66.90 | 185.32 |
| 小指の先端 | 66.70 | 184.76 |
| 親指の横振り | 80 | 235.29 |
| 営業時間 | - | 0.35s |
センサー
| パラメータ | 仕様 |
|---|---|
| ピエゾ抵抗アレイ | 6*12 |
| センサー荷重面積 | 9.6*14.4mm |
| トリガー力 | 5g |
| 測定範囲 | 20N |
| サービス寿命 | 100,000サイクル |
| 通信フレームレート | 200FPS |
| 値の範囲 | 0~4095 |
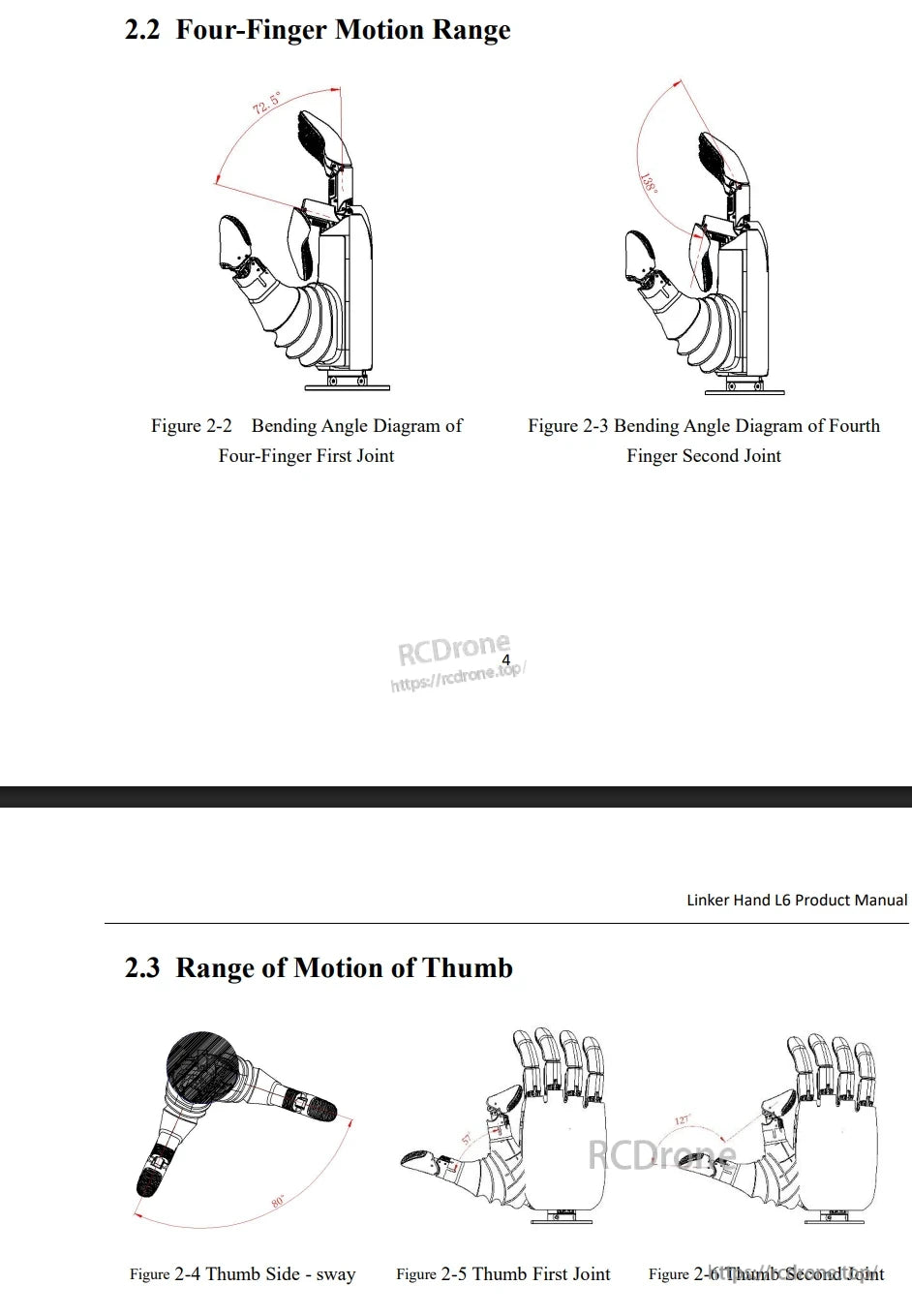
外観寸法
| 定義 | パラメータ (mm) |
|---|---|
| 中指の先端から手のひらの基部までの長さ | 190.7 |
| 最大手のひらの幅 | 121 |
| 親指の先端から手のひらの基部までの長さ | 134.3 |
| 手首の高さ | 9. |
| 手首の直径 | 60 |
含まれるもの
- USB‑to‑CANデバッグケーブル x1
- コネクタケーブル XT30 (2+2) x1
- 電源アダプター x1
- 電源ケーブル x1
- Linker Hand L6 x1
アプリケーション
- 精密な把持と物体の取り扱い
- 工具の把持と操作
- 部品のピックアンドプレース作業
マニュアル
詳細


6自由度を持つ高性能な巧妙なロボットハンド。コンパクトな機動性、マルチセンサーシステム、デバイスとクラウドの統合により、正確な制御、環境適応、クラウドスキルライブラリを介したコード不要のカスタマイズが可能です。



Linker Hand L6は、全金属製の指、触覚センサー、耐摩耗性シリコン、電動シリンダードライブ、そして防挟みゴムパッドを備えています。指の長さ:190.7mm; 手のひらの幅:121mm; 手首の直径:60mm。
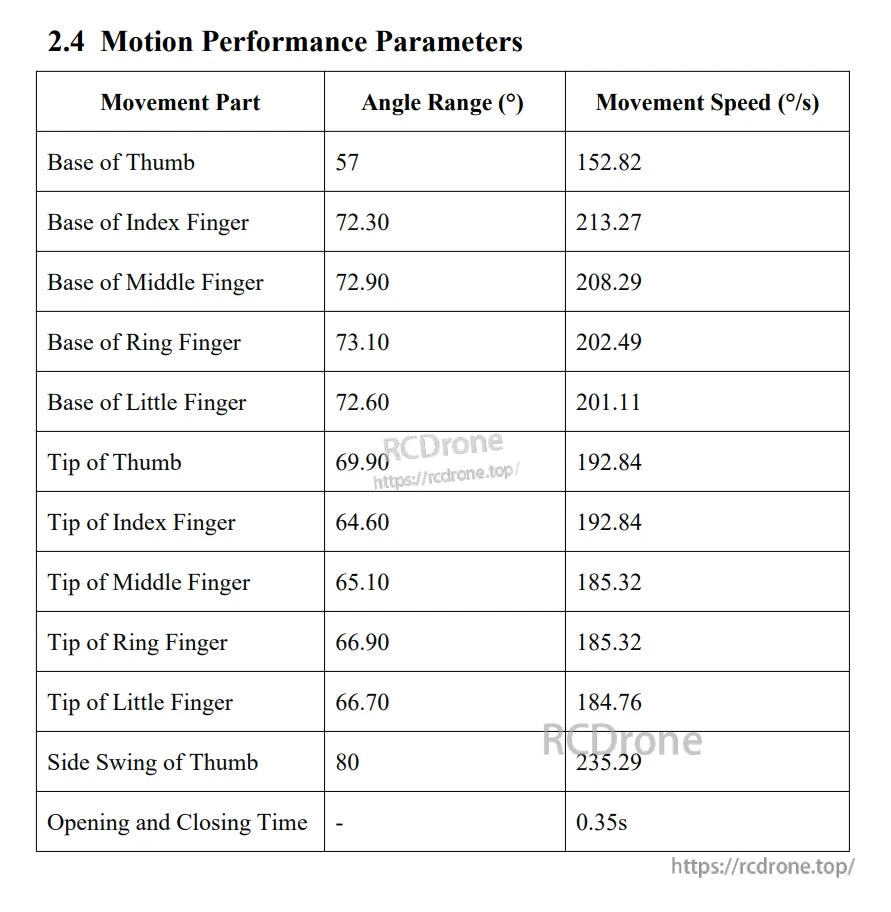
指と親指の関節の動作範囲:四本指の第一関節72.5°、第二関節138°; 親指の横揺れ80°、第一関節57°、第二関節127°。
ロボットハンドの指の動作パラメータ:親指のスイング235.29°/s、開閉に0.35秒—詳細な関節角度範囲と速度を示す精密な関節運動。
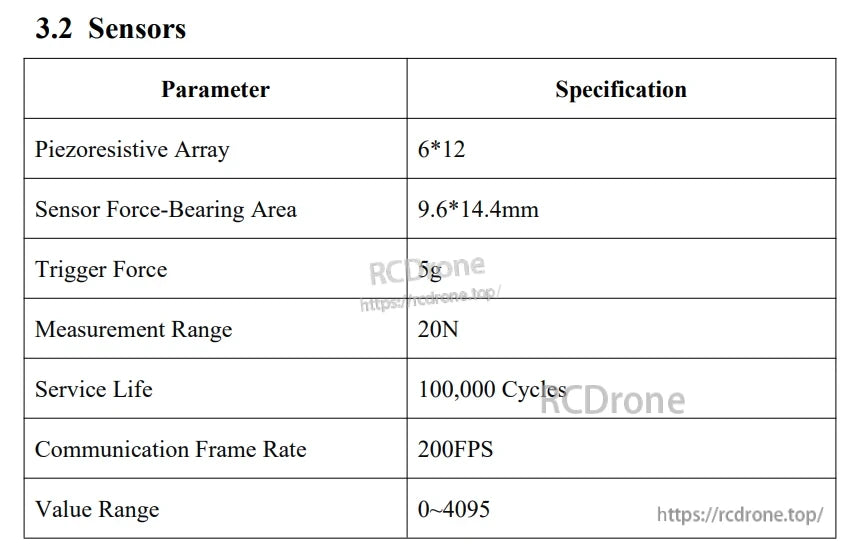
センサー仕様:6x12アレイ、9.6x14.4mmの面積、5gトリガー、20N範囲、100kサイクル、200FPS、0-4095の値範囲。
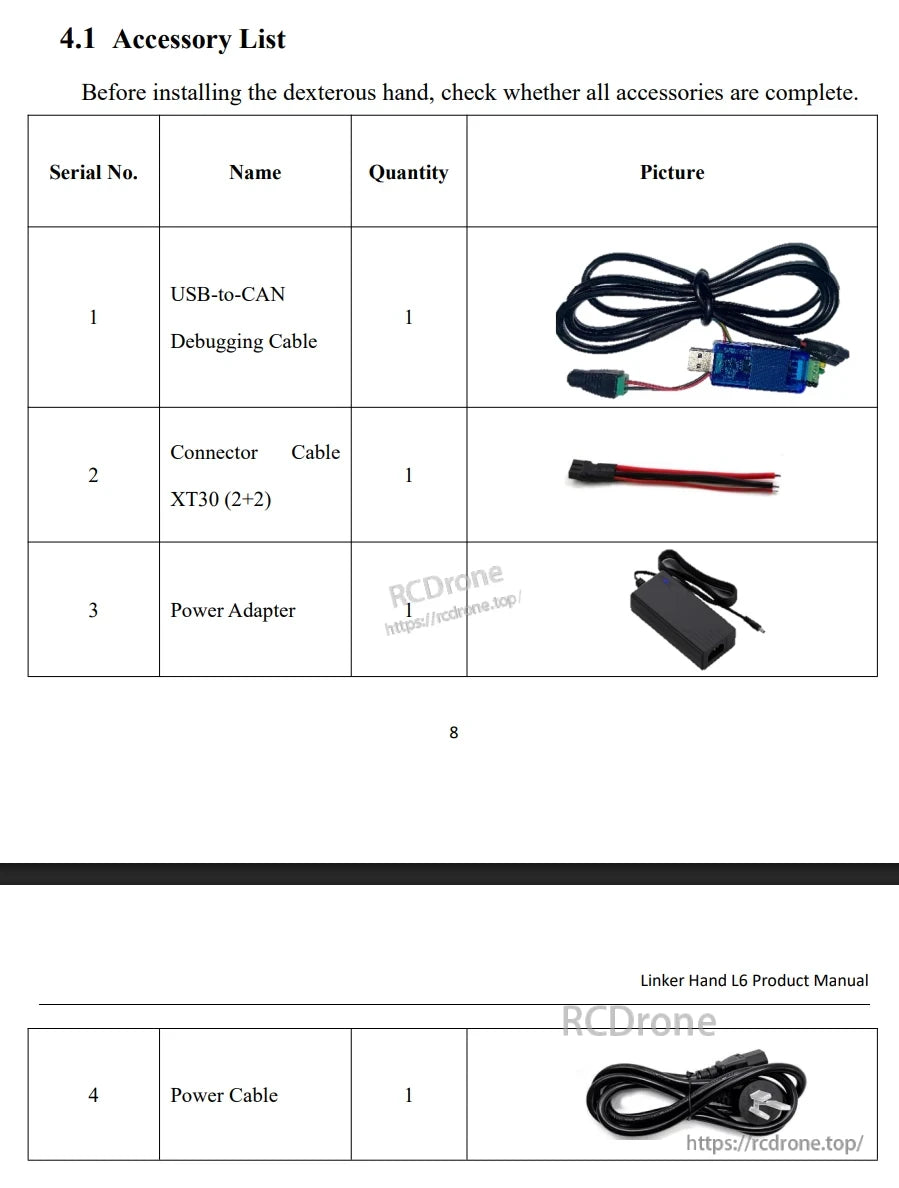
Linker Hand L6のアクセサリーリスト:USB-to-CANケーブル、XT30コネクタ、電源アダプタ、電源ケーブル。インストール前に完全性を確認してください。
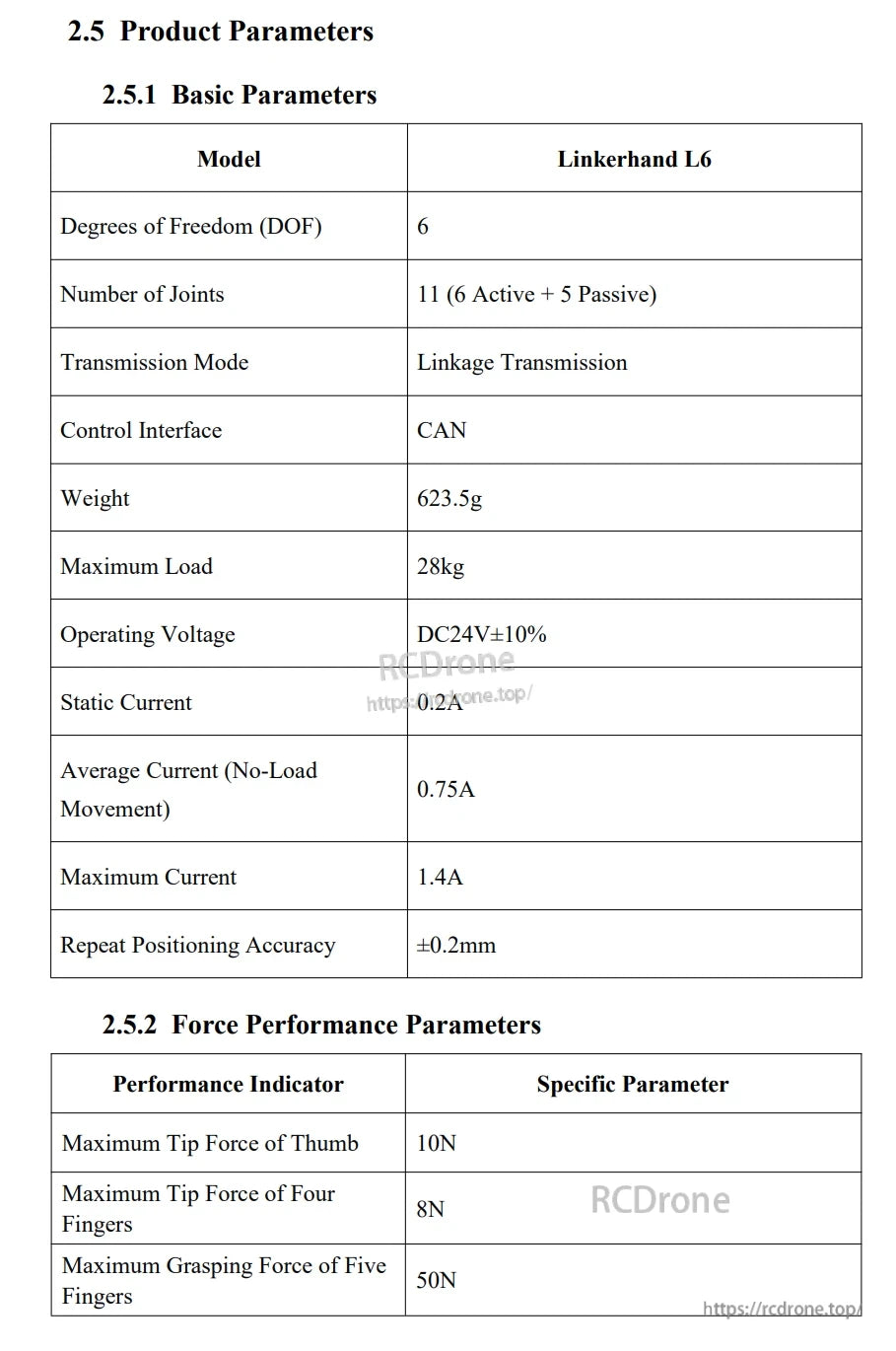
Linkerhand L6ロボットハンドは6自由度、11関節、CAN制御を備え、重量は623.5g、最大荷重は28kg、DC24V±10%で動作し、±0.2mmの精度を提供し、最大50Nの把持力を発揮します。







