







LINKERBOT Linker Hand O6 ロボットハンド、6自由度、11関節、CAN/RS485、130Nグリップ、±0.2mm精度、DC24V±10%
LINKERBOT Linker Hand O6 ロボットハンド、6自由度、11関節、CAN/RS485、130Nグリップ、±0.2mm精度、DC24V±10%
LINKERBOT
受取状況を読み込めませんでした
概要
LINKERBOT Linker Hand O6は、コンパクトな統合と精密な操作のために設計されたロボットハンドです。6自由度(6つのアクティブジョイント + 5つのパッシブジョイント)を提供し、安定した作動のためのワームギア伝動、CAN/RS485制御、オプションの触覚センサーを備えています。巧妙な構造により、DC24V±10%の動作電圧で±0.2mmの繰り返し位置決め精度を持つ最大130Nの五指グリップ力を発揮します。軽量の370gの構造と小さなフットプリントは、物流処理、産業組立、および不規則な形状の把持シナリオをサポートします。
主な特徴
コンパクト && アジャイル
コンパクトな構造設計は、機器の負荷を軽減し、狭いスペースでの精密な把持のための柔軟性を向上させます。
高耐久性
軽量で強度があり、耐摩耗性に優れたアルミニウム合金で製造されており、長期的な安定したパフォーマンスをサポートします。
デバイス-クラウド統合
デバイス-クラウド統合により、簡素化された操作とカスタマイズを備えたクラウドベースのスキルライブラリを介して迅速な展開が可能になります。
仕様
| モデル | LINKERBOT リンカーハンド O6 |
| 自由度 (DoF) | 6 |
| 関節数 | 11 (6 アクティブ + 5 パッシブ) |
| 伝達方式 | ワームギア伝達 |
| 制御インターフェース | CAN/RS485 |
| 重量 | 370g |
| 最大荷重 | 30kg |
| 動作電圧 | DC24V±10% |
| 繰り返し位置決め精度 | ±0.2mm |
| 触覚センサー | オプション |
| 最大親指先端力 | 28N |
| 四本の指先の最大力 | 33N |
| 五本の指の最大グリップ力 | 130N |
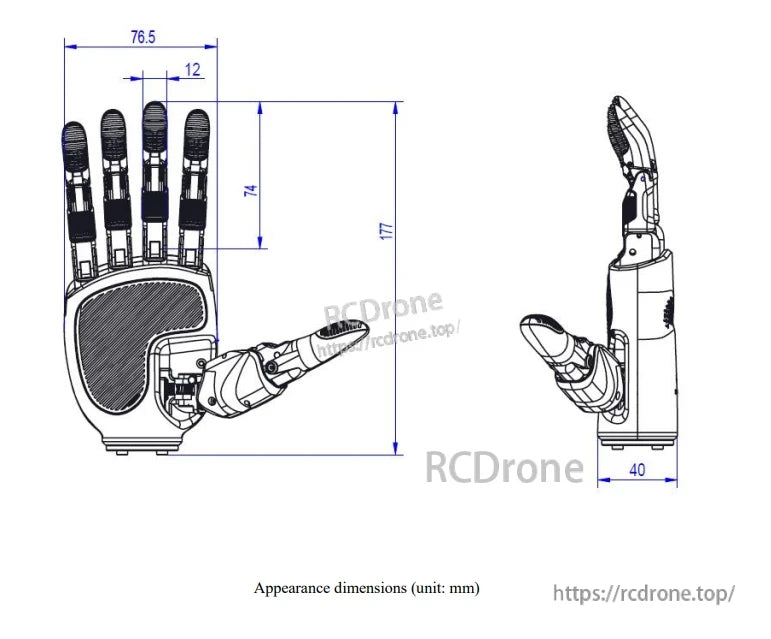
| 寸法(外観) | 高さ 177mm; 幅 76.5mm; 厚さ 40mm |
可動範囲
| LF2, RF2, MF2, FF2 (曲げ) | 90° |
| LF1, RF1, MF1, FF1 (曲げ) | 80° |
| THUMB1 (曲げ) | 55° |
| THUMB2 (曲げ) | 30° |
| THUMB3 (横揺れ) | 88° |
含まれるもの
- USB-to-CAN デバッグケーブル ×1
- コネクタケーブル XT30 (2+2) ×1
- 電源アダプター ×1
- 電源ケーブル ×1
- リンカー ハンド O6 x1
販売または技術サポートについては、[email protected] orに連絡するか、https://rcdrone.top/を訪問してください。
アプリケーション
- 物流処理と材料移動
- 産業組立と工具操作
- 不規則な形状や消費者アイテムの安定した把握
マニュアル
Linker_Hand_O6_Product_Manual.pdf
詳細

Linker Hand O6は、正確で強力なグリップのために6つのアクティブジョイントと5つのパッシブジョイントを提供します。コンパクトで耐久性のあるアルミニウムデザインは、物流、組立、不規則な把握に適しています。コーディングなしで簡単にAIトレーニングができるクラウド統合機能を備えています。


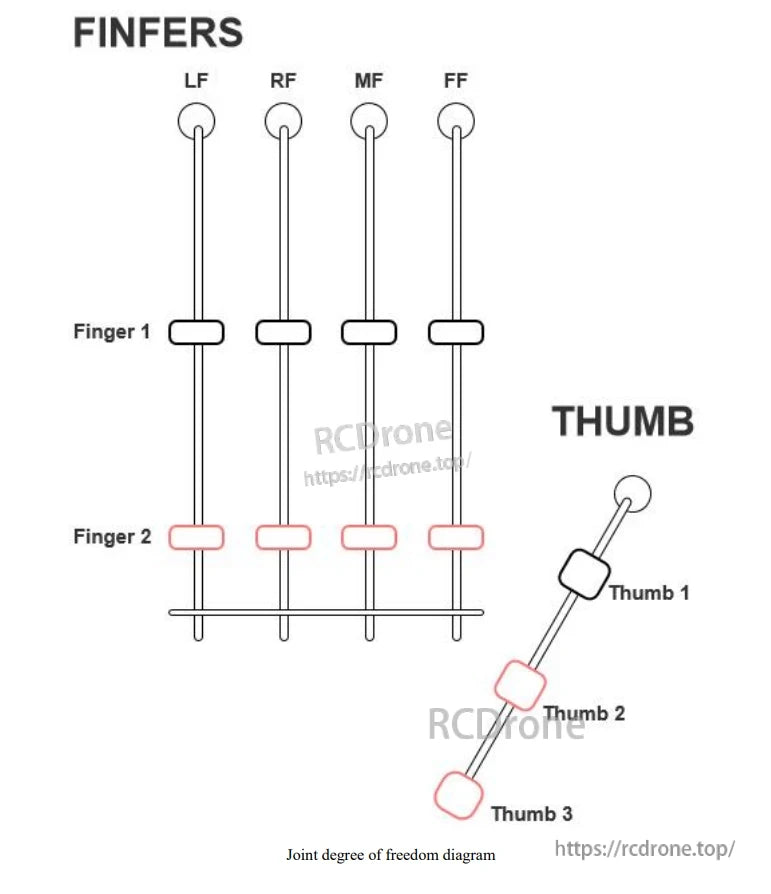
指と親指の関節自由度図
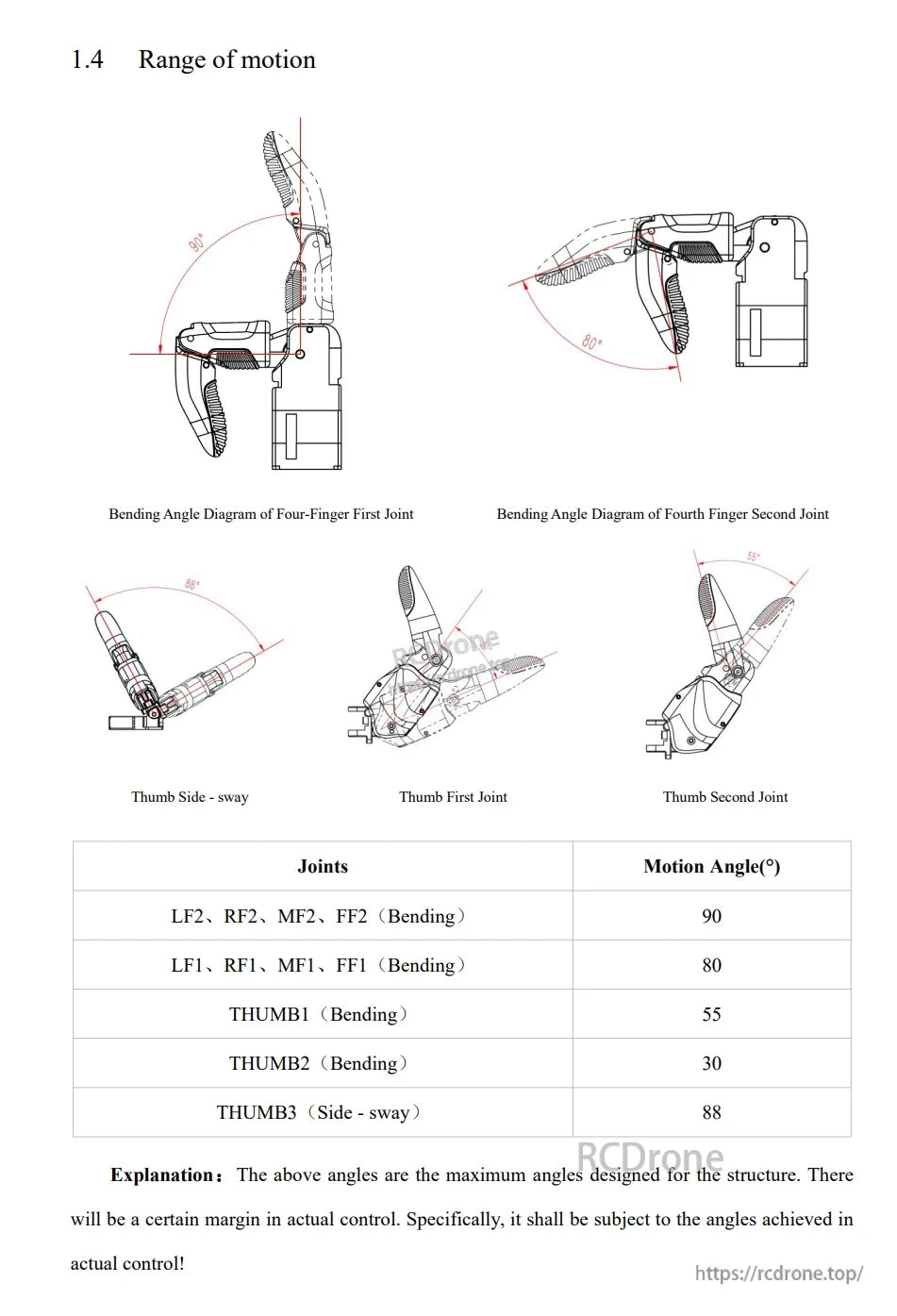
指は80〜90°曲がり、親指は30〜55°曲がり、横揺れは88°に達します。これらは設計上の最大角度であり、実際の制御は若干異なる場合があります。
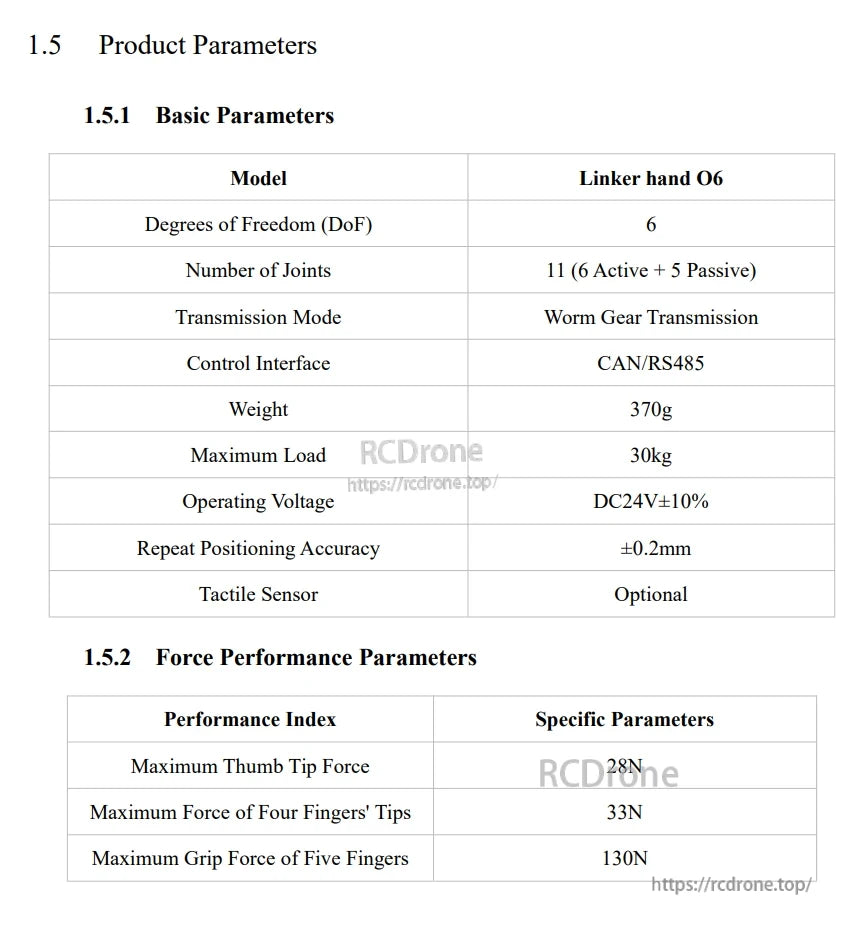
Linker Hand O6ロボットハンドは6自由度、11関節、ワームギア伝達、CAN/RS485制御を備え、重量は370g、最大荷重は30kg、動作電圧はDC24V±10%、精度は±0.2mmで、指定された力性能を持つオプションの触覚センサーを提供します。

器用な手の取り付け用アクセサリーリスト:USB-to-CANケーブル、XT30コネクタ、電源アダプタ、電源ケーブル—すべて数量は1です。







