



LKMTECH MF9010-V2 モーター 24V 統合型高トルクサーボモーター 18ビットエンコーダー搭載、RS485/CAN、DF70v2ドライブ
LKMTECH MF9010-V2 モーター 24V 統合型高トルクサーボモーター 18ビットエンコーダー搭載、RS485/CAN、DF70v2ドライブ
LKMTECH
通常価格
$198.20 USD
通常価格
セール価格
$198.20 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
このLKMTECH MF9010-V2モーターは、軽量設計、高い制御精度、および高トルク出力を必要とするアプリケーション向けに設計された統合モーターソリューションです。MF9010 v2には、エンコーダ解像度が14ビットから18ビットにアップグレードされた製品更新、コギングトルクの最適化、PWM入力のサポート、さまざまなボーレートでのCAN/RS485通信が含まれています。
主な特徴
- 統合設計; 軽量設計; 高精度制御; 高トルク出力
- エンコーダ解像度: 14ビットから18ビットにアップグレード
- コギングトルク最適化
- PWM入力をサポート
- CANおよびRS485通信はさまざまなボーレートをサポート
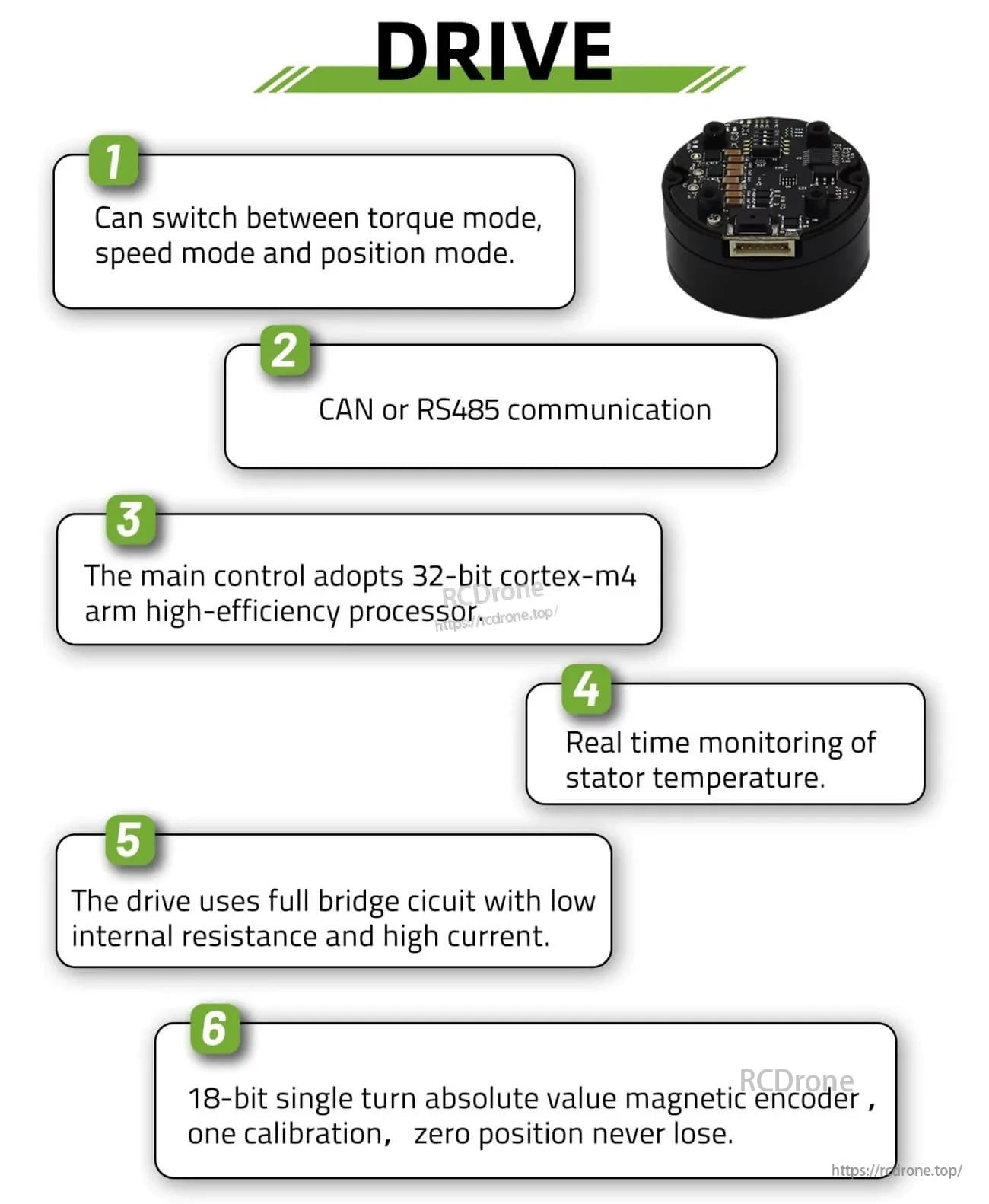
- ドライブはトルクモード、速度モード、位置モードの切り替えが可能
- メインコントロールは32ビットCortex-M4 ARM高効率プロセッサを採用
- ステータ温度のリアルタイム監視
- ドライブは低内部抵抗と高電流のフルブリッジ回路を使用
- 18ビット単回転絶対値磁気エンコーダ; 一度のキャリブレーション; ゼロ位置は決して失われない
- パラメータ調整、テスト、アップグレード用のプログラムソフトウェアを提供
- PC、MCU、PLC、ICP、RPiなどのオープンソース開発をサポート
アプリケーション
- ヒューマノイドロボット
- ロボティックアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
- カメラPTZ
- レーザーライダー
- 電力ステーション検査ロボット
- 産業検査
技術仕様
| パラメータ | MF9010v2 (17回転) | MF9010v2 (35回転) |
|---|---|---|
| アイテム名 | MF9010v2 | MF9010v2 |
| 回転数 | 17 | 35 |
| 定格電圧 | 24V | 24V |
| 最大速度 | 1465RPM | 690RPM |
| 定格トルク | 1.09N.m | 1.07N.m |
| 定格速度 | 1080RPM | 450RPM |
| 定格電流 | 6.66A | 3.27A |
| 最大出力 | 215W | 128W |
| 最大トルク | 2.2N.m | 4.1N.m |
| 速度定数 | 45rpm/V | 18.8rpm/V |
| トルク定数 | 0.16N.m/A | 0.33N.m/A |
| 巻線タイプ | Y | Y |
| 相抵抗 | 0.29Ω | 1.15Ω |
| 相インダクタンス | 0.53mH | 3mH |
| モーターポール | 28 | 28 |
| ローター慣性 | 2860gcm² | 2860gcm² |
| モーター温度 | はい | はい |
| ベアリング定格荷重 | 650N | 650N |
| モーター重量 | 525g | 525g |
| 推奨ドライブ | DF70v2 | DF70v2 |
| ドライブ入力電圧 | 7.4-32V | 7.4-32V |
| 通信 | RS485 または CAN | RS485 または CAN |
| 通信周波数 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| エンコーダ | 18ビット磁気エンコーダ | 18ビット磁気エンコーダ |
| エンコーダボーレート(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| ボーレート(CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| 制御モード | トルクループ(24KHz)/スピードループ(8KHz)/ポジションループ(8KHz) | トルクループ(24KHz)/スピードループ(8KHz)/ポジションループ(8KHz) |
| 加速曲線 | 台形加速 | 台形加速 |
モーター特性曲線(参考)
- モーター特性曲線の凡例:入力直流電流、効率、出力電力、出力トルク
- 表示されている曲線ラベル:MF9010-17TおよびMF9010-35T
マニュアル / ドキュメント
選択ガイダンスと統合サポートについては、[email protected] orに連絡するか、https://rcdrone.top/ .
詳細

MF9010 V2は、コンパクトな構造で正確で高トルクのモーションコントロールが必要なために、モーター、エンコーダー、ドライブ準備済みの統合を組み合わせています。
複数の制御モードとCAN/RS485接続により、アクチュエーターをさまざまなロボット関節や自動化軸に合わせて調整しやすくなります。
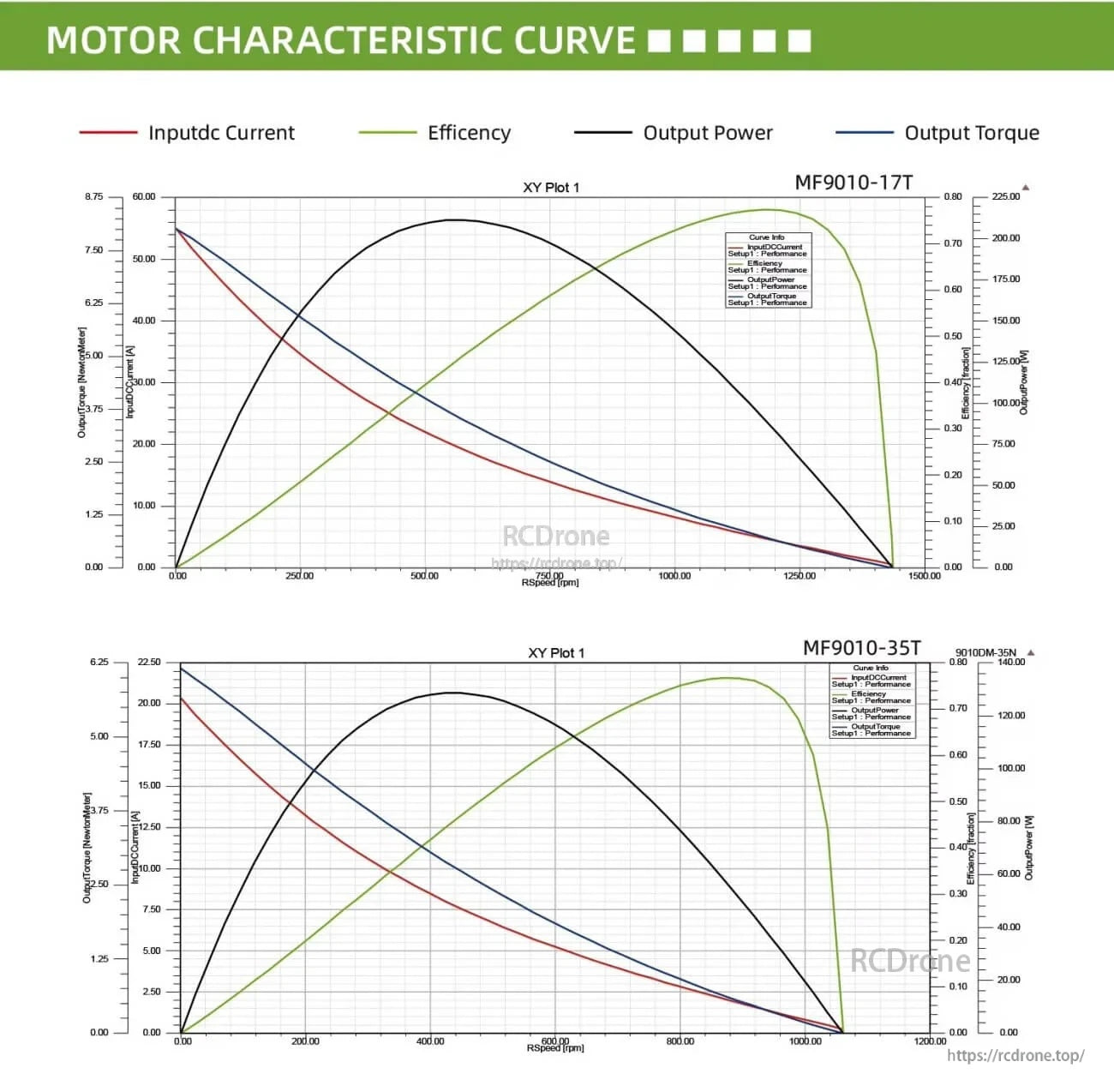
性能曲線は、ターゲット速度、トルク、および効率範囲に対して17ターンおよび35ターンの巻線を比較するのに役立ちます。
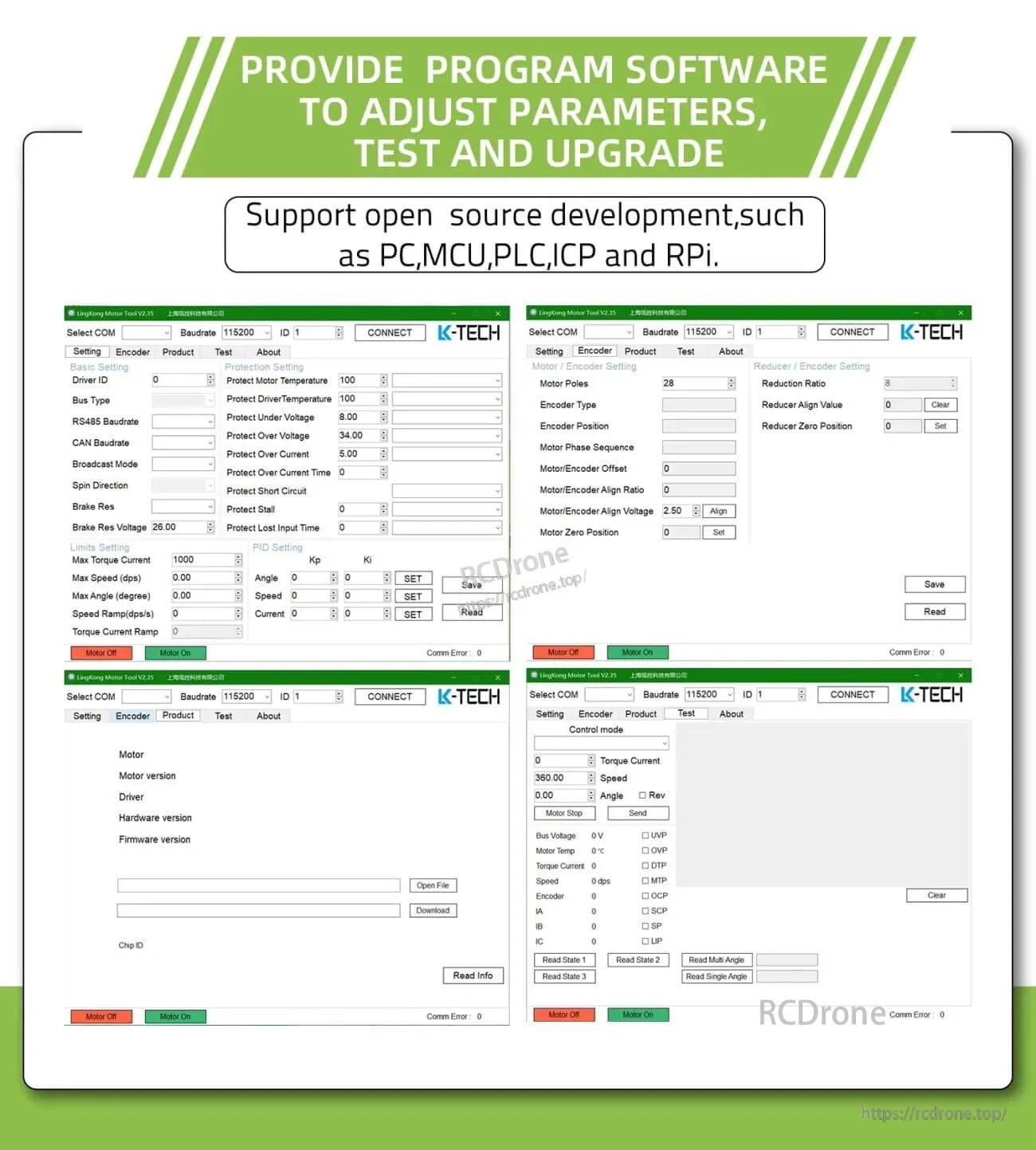
構成ソフトウェアは、パラメータ調整、テスト、および立ち上げやメンテナンス中のアップグレードのために提供されます。
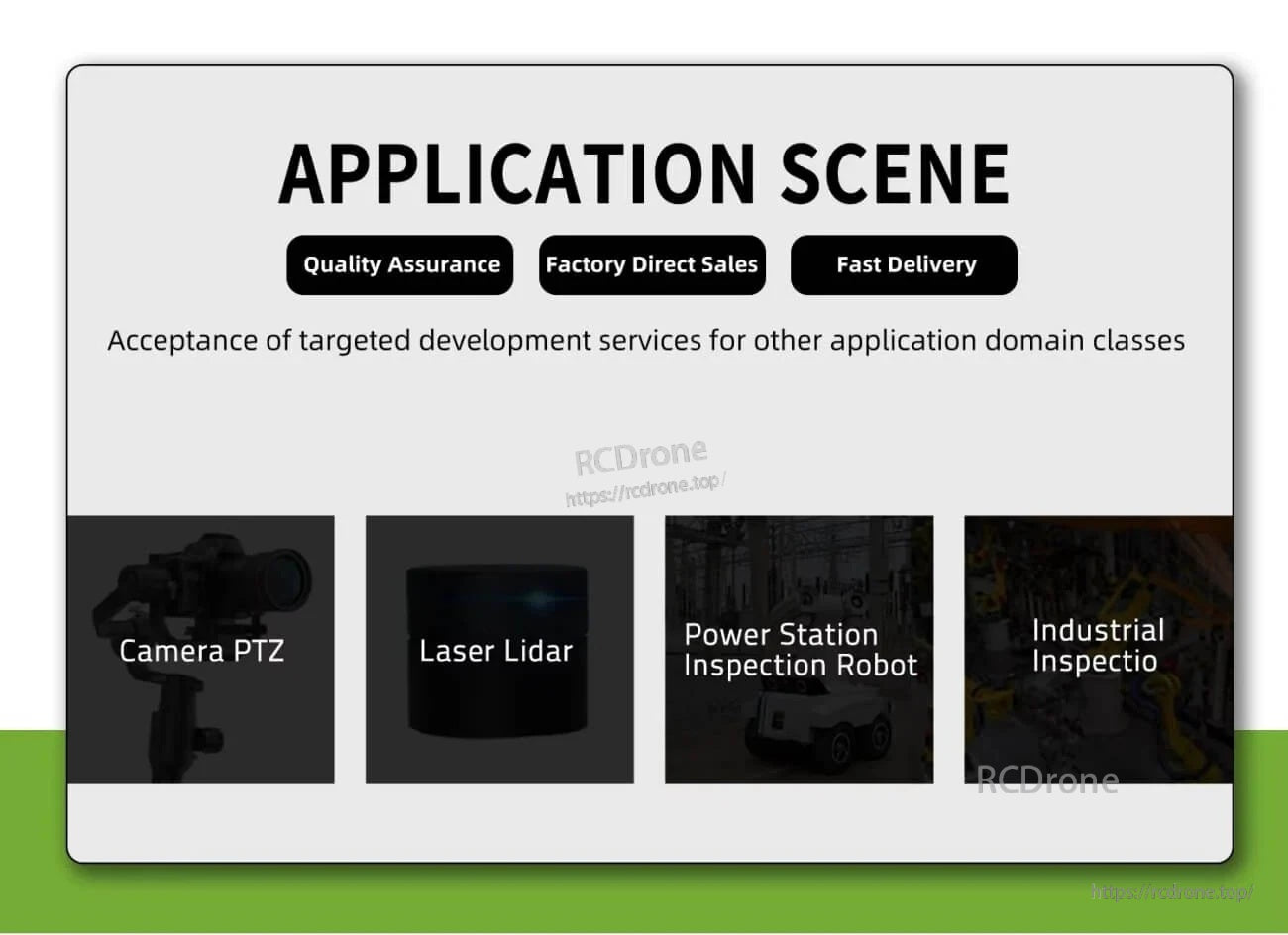
一般的な使用例には、PTZおよびライダーシステム、さらに検査ロボットやその他のモバイル自動化プロジェクトが含まれます。
Related Collections



