




LKMTECH MG4005E-i10-V3 プラネタリーギアモーター, 24V 1:10 PG4210, RS485/CAN デュアルエンコーダ
LKMTECH MG4005E-i10-V3 プラネタリーギアモーター, 24V 1:10 PG4210, RS485/CAN デュアルエンコーダ
LKMTECH
受取状況を読み込めませんでした
概要
このLKMTECH MG4005E-i10-V3 モーターは、コンパクトなギア、クローズドループフィードバック、およびバス通信を必要とするロボティックモーションおよびオートメーションジョイント用に設計されたプラネタリーギアモーター です。精密な制御のために、プラネタリーギアリデューサー(PG4210、1:10)とデュアル絶対磁気エンコーダー(モーター側 + リデューサー側)を統合しています。
主な特徴
- 惑星ギアモーター:高出力、大トルク、高精度
- ブラシレスモーター + 高精度惑星ギア減速機
- FOC制御(ドライブ/ドライバが必要)
- デュアルエンコーダー:18ビット単回転絶対磁気エンコーダー(モーター側) + 14ビット単回転絶対磁気エンコーダー(減速機側)
- 減速機側エンコーダーは単回転の絶対値出力をサポートし、電源オフ後にゼロポイントを記憶します
- RS485またはCANバス通信
- PCソフトウェアを介したパラメータ調整、テスト、ファームウェアアップグレードをサポート
- オープンソース開発プラットフォームをサポート:PC、MCU、PLC、産業用コンピュータ、Raspberry Pi
- 複数の制御モードをサポート:トルクモード、スピードモード、マルチターン制御モード、シングルターン位置 + 方向モード、インクリメンタル位置モード、マルチターン制御モード(スピード制限付き)、シングルターン位置 + 方向モード(スピード制限付き)、インクリメント位置モード(スピード制限付き)
- デュアル温度センサーインターフェースがモーターとドライブの温度をリアルタイムで監視します
- 予備ブレーキ機能(ブレーキ / ブレーキ解除)
- リストされたマルチ保護機能:UVP、OVP、DTP、MTP、OCP、SCP、MSP、LIP
統合サポートおよび販売前確認については、https://rcdrone.top/に連絡するか、 [email protected]にメールしてください.
仕様
| アイテム名 | MG4005E-i10-V3 |
| 定格電圧 | 24V |
| 最大速度 | 320RPM |
| 定格トルク | 1 N.m |
| 定格速度 | 255RPM |
| 定格電流 | 1.8A |
| 最大出力 | 65W |
| 最大トルク | 2.5 N.m |
| 速度定数 | 106.3rpm/V |
| トルク定数 | 0.06 N.m/A |
| 回転数 | 28 |
| 巻き線タイプ | Y |
| 相抵抗 | 1.4Ω |
| 相インダクタンス | 0.5mH |
| モーターポール | 28 |
| ローター慣性 | 140gcm² |
| モーター温度 | はい |
| リデューサータイプ | PG4210 |
| 減速比 | 1:10 |
| バックラッシュ | ≤10アークミニッツ |
| ベアリング定格荷重 | 1000N |
| モーター重量 | 183g |
| 推奨ドライブ | DG40E |
| ドライブ入力電圧 | 7.4-32V |
| 通信 | RS485またはCAN |
| 通信周波数 | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| エンコーダ | 18ビット(モーター)+ 14ビット(減速機)磁気エンコーダ |
| エンコーダボーレート(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| ボーレート(CAN) | 100K, 125K, 250K, 500K, 1M |
| 制御モード | トルクループ(24KHz)/ スピードループ(8KHz)/ ポジションループ(4KHz) |
| 加速曲線 | 台形加速 |
インターフェース定義
| インターフェース | 注意 |
|---|---|
| A/H | RS485-AまたはCAN-H |
| B/L | RS485-BまたはCAN-L |
| V- | 負電源 |
| V+ | 正電源 |
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン / ウェアラブルロボット
- 四足ロボット / ロボット犬
- AGV車両 / AGVカー
- ARUロボット
マニュアル / ファイル
詳細

MG4005E-i10-V3は、ロボットの関節や自動化軸用にコンパクトな形状でブラシレスモーターと惑星減速機を組み合わせています。

デュアルシングルターン絶対磁気エンコーダは、モーター側と出力側のフィードバックを提供し、バス設定用の専用IDスイッチを備えています。
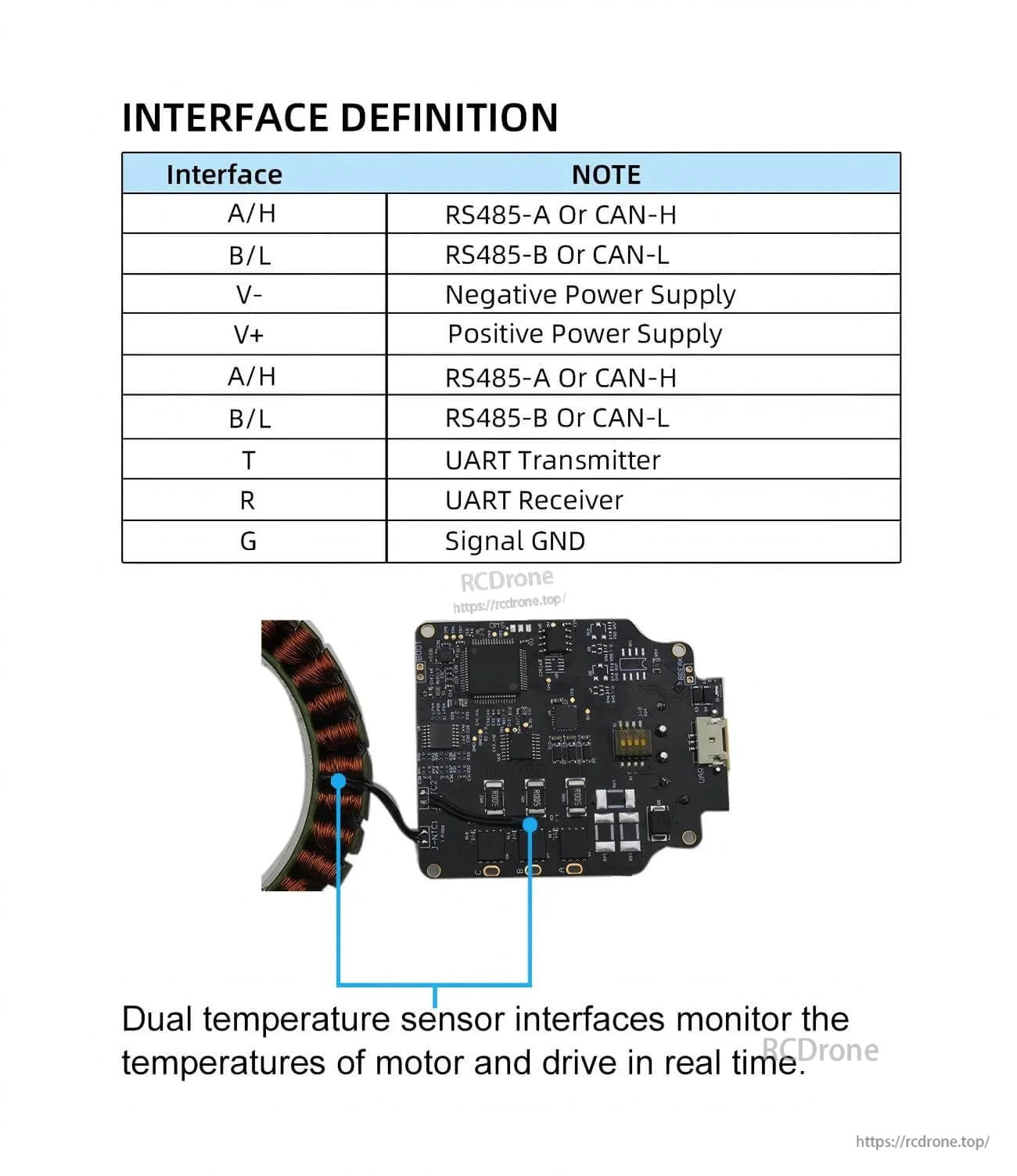
配線は、電源、RS485/CAN通信、およびUART信号接続のための明確に定義された端子で簡素化されています。
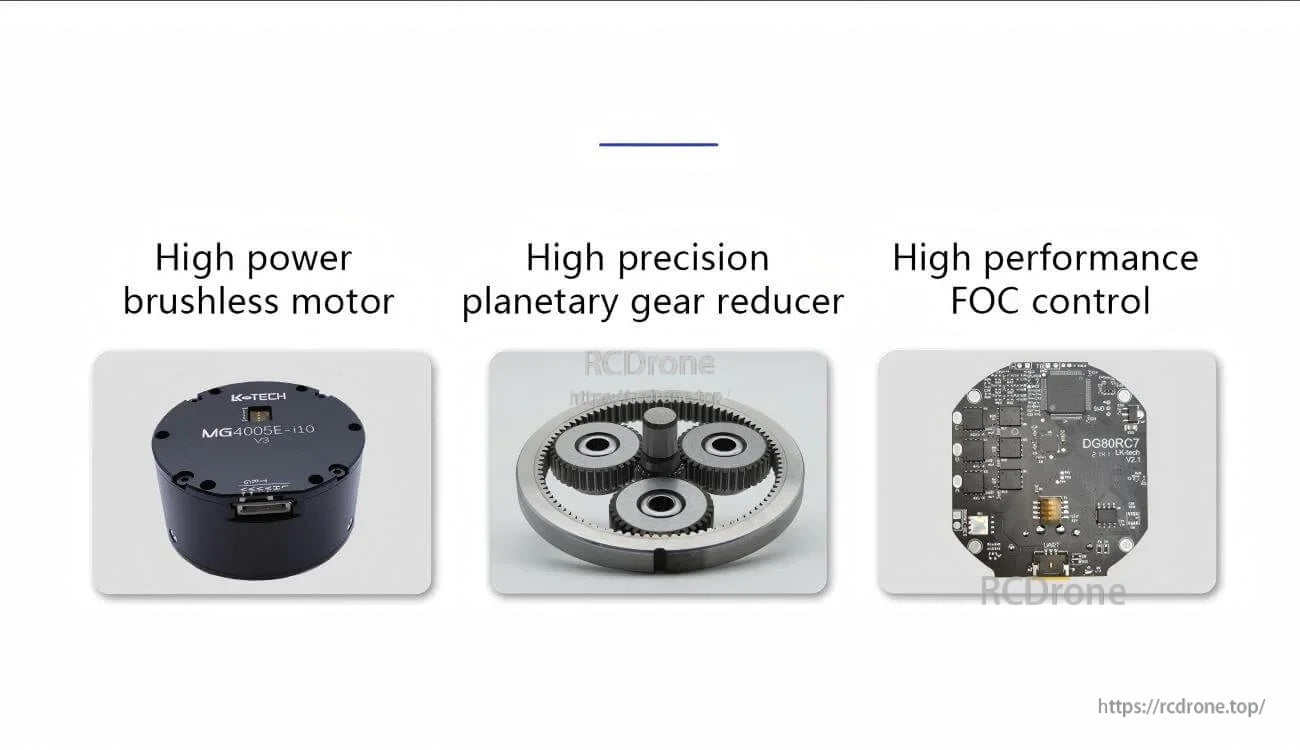
ブラシレスモーター、精密な惑星ギアリング、およびFOC制御により、スムーズなトルク供給と正確な動作制御がサポートされます。

ドライブは、RS485またはCAN通信をサポートし、柔軟な統合のための広い入力電圧範囲(7.4–32V)を提供します。
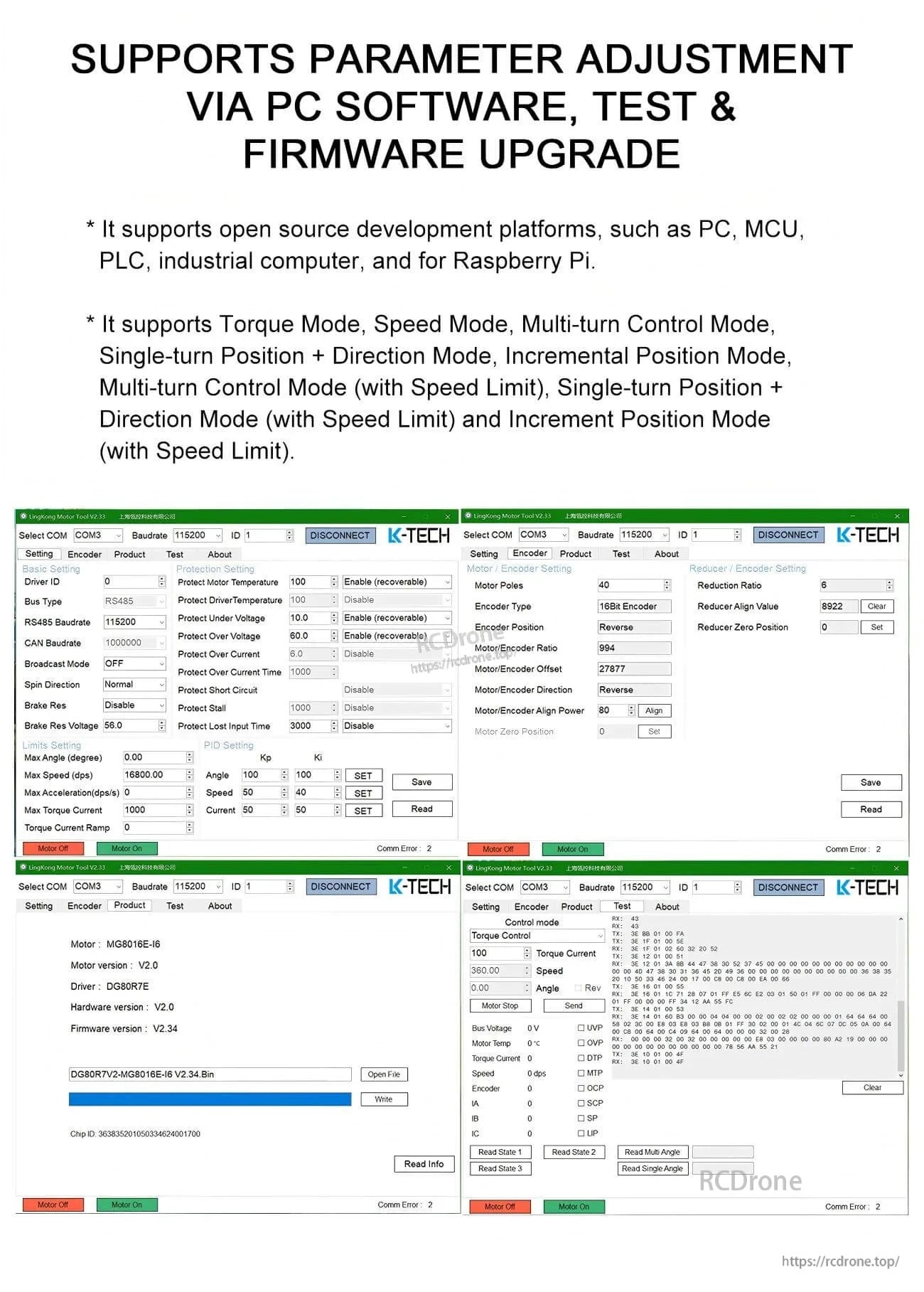
PCソフトウェアは、パラメータ調整、機能テスト、およびファームウェアのアップグレードを、立ち上げおよびメンテナンス中に可能にします。
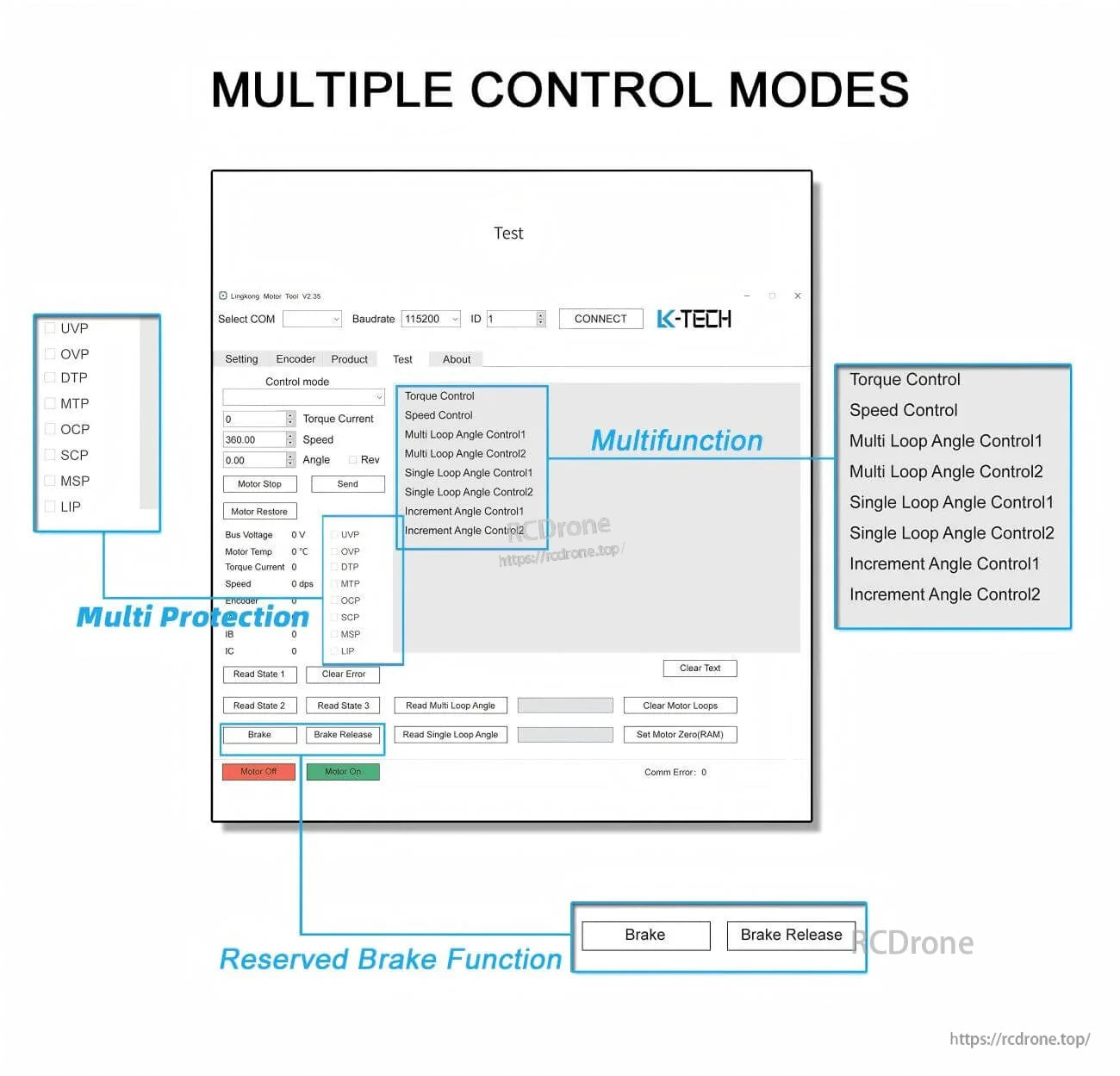
トルク、速度、位置制御などの複数の制御モードから選択でき、内蔵の保護状態監視機能があります。
モバイルロボット、アーティキュレートアーム、四足歩行ロボット、およびウェアラブルロボティクスにおけるコンパクトなアクチュエーションのために設計されています。
Related Collections




