




LKMTECH MG4010E-i10-V3 モーター 24V 320RPM 2.5N.m プラネタリーギア減速機 1:10 RS485/CAN エンコーダ
LKMTECH MG4010E-i10-V3 モーター 24V 320RPM 2.5N.m プラネタリーギア減速機 1:10 RS485/CAN エンコーダ
LKMTECH
通常価格
$187.00 USD
通常価格
セール価格
$187.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
このLKMTECH MG4010E-i10-V3 モーターは、ブラシレスモーター で、惑星ギア減速機と絶対磁気エンコーダーを備えており、高精度、大トルク、安定したクローズドループ制御を必要とするロボットおよび自動化アクチュエーター向けに設計されています。RS485またはCANバス通信をサポートし、推奨されるDG40Eドライブ(入力電圧7.4-32V)と連携します。
主な特徴
- 高標準デザイン;高出力、大トルク、高精度
- 高出力ブラシレスモーター + 高精度プラネタリーギア減速機
- 高性能FOC制御(駆動関連機能)
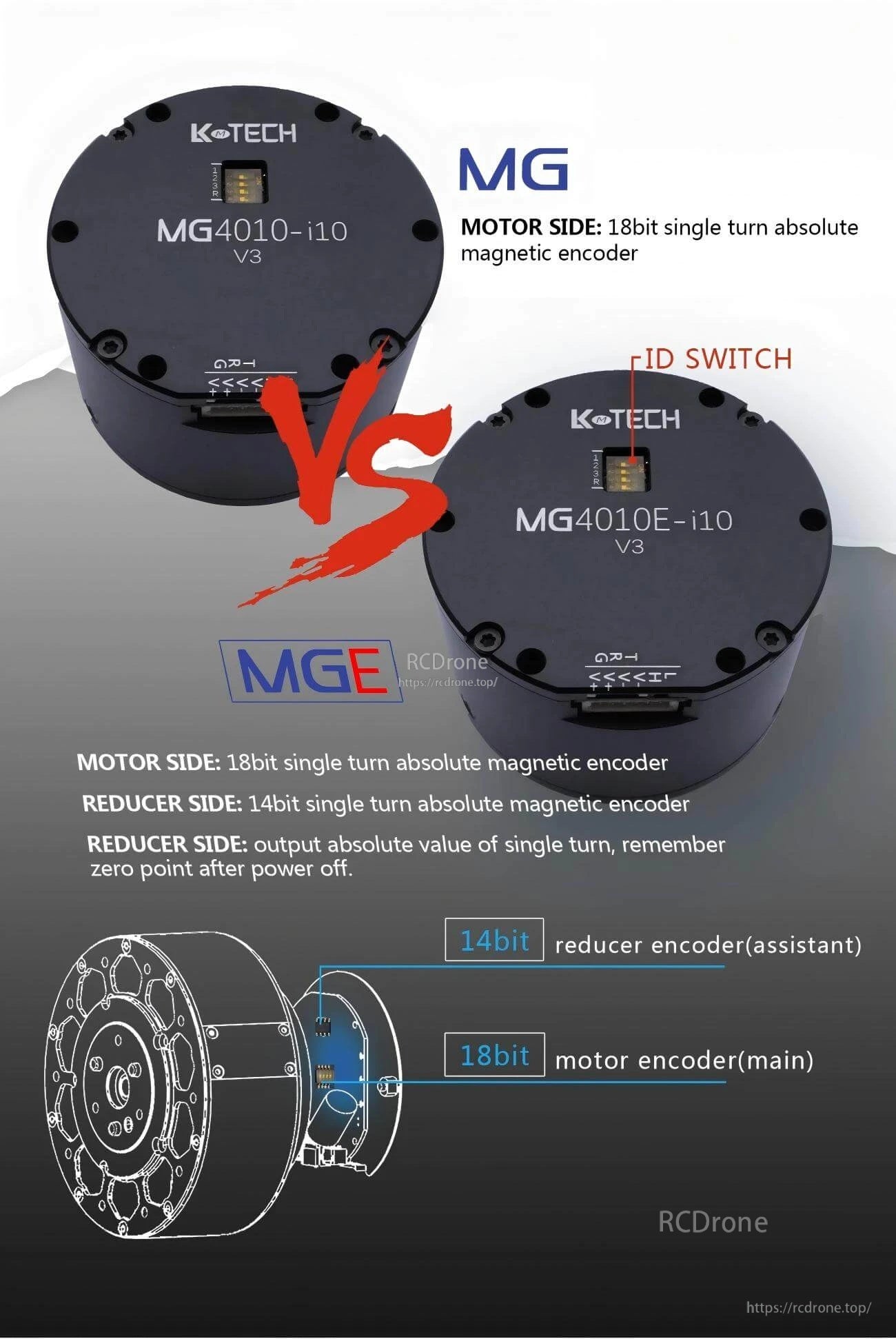
- デュアルエンコーダー;電源オフ後にゼロポイントを記憶(単回転の絶対値出力)
- モーター側エンコーダー:18ビット単回転絶対磁気エンコーダー
- 減速機側エンコーダー:14ビット単回転絶対磁気エンコーダー
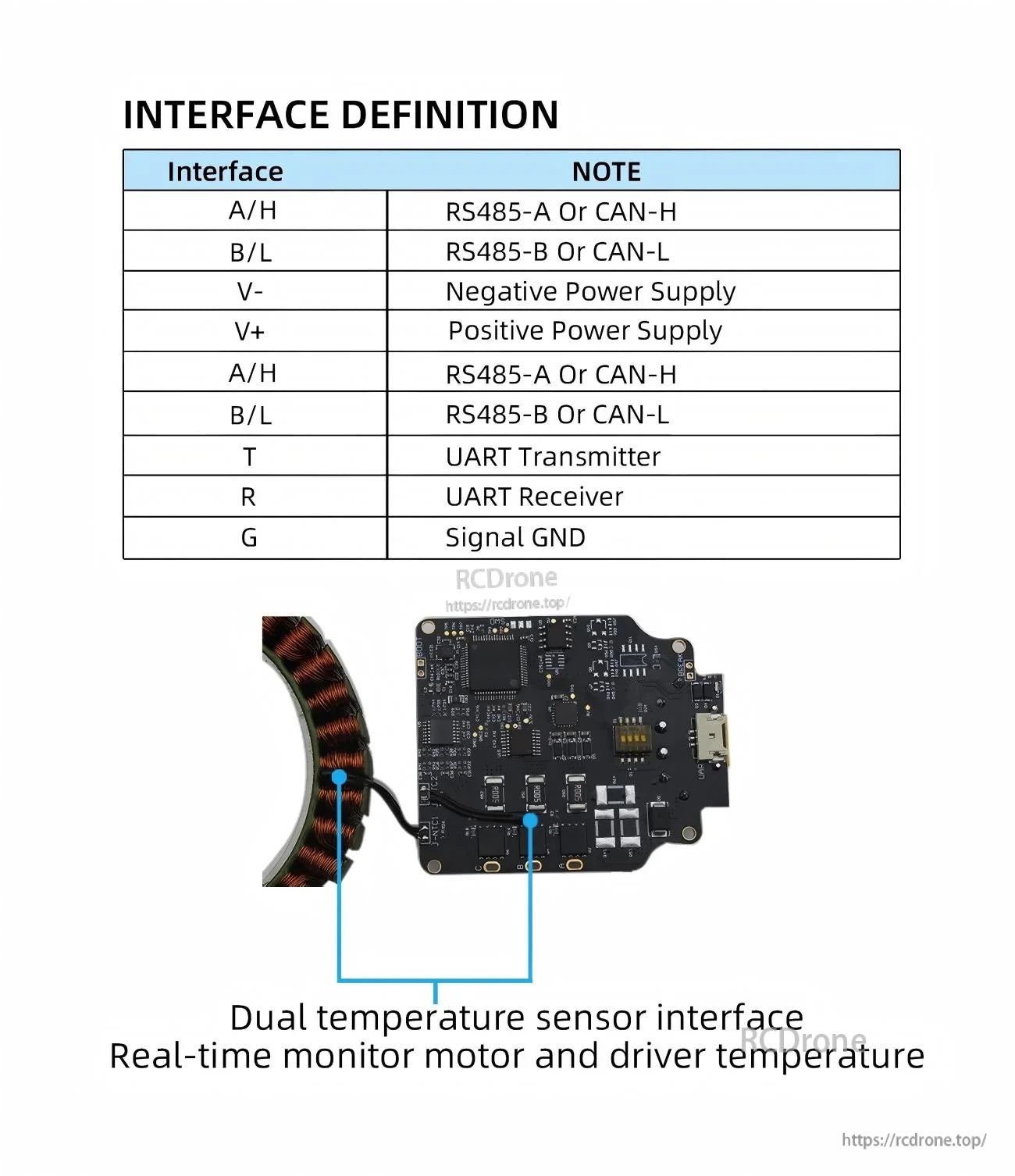
- モーターとドライバーの温度をリアルタイムで監視するためのデュアル温度センサーインターフェース(モーター温度:はい)
- IDスイッチ(モーターケースに表示)
仕様
| 商品名 | MG4010E-i10-V3 |
| 定格電圧 | 24V |
| 最大速度 | 320RPM |
| 定格速度 | 260RPM |
| 定格トルク | 2.5N.m |
| 最大トルク | 4.5N.m |
| 定格電流 | 3.5A |
| 最大出力 | 140W |
| 速度定数 | 108.3rpm/V |
| トルク定数 | 0.07N.m/A |
| 回転数 | 14 |
| 巻き方タイプ | Y |
| 相抵抗 | 0.604Ω |
| 相インダクタンス | 0.28mH |
| モーターポール | 28 |
| ローター慣性 | 202gcm² |
| モーター温度 | はい |
| リデューサータイプ | PG4210 |
| 減速比 | 1:10 |
| バックラッシュ | ≤8アークミニット(画像テキストにも記載:ギアバックラッシュ6アークミニット) |
| ベアリング定格荷重 | 1000N |
| モーター重量 | 250g |
| サイズ | Φ53*41 |
| 推奨ドライブ | DG40E |
| ドライブ入力電圧 | 7.4-32V |
| 通信 | RS485 または CAN |
| 通信周波数 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| エンコーダ | 18ビット(モーター)+14ビット(減速機)磁気エンコーダ |
| エンコーダボーレート (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| ボーレート (CAN) | 100K, 125K, 250K, 500K, 1M |
| 制御モード | トルクループ(24KHz)/スピードループ(8KHz)/位置ループ(4KHz) |
| 加速曲線 | 台形加速 |
インターフェース定義
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| V- | 負電源 |
| V+ | 正の電源 |
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| T | UART 送信機 |
| R | UART 受信機 |
| G | 信号 GND |
アプリケーションシナリオ
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV 車両 / AGV 車
- ARU ロボット
- ロボット犬
- ウェアラブルロボット
統合に関する質問(RS485/CAN 設定、エンコーダボーレート選択、またはドライブマッチング)については、[email protected] orに連絡するか、https://rcdrone.top/. を訪問してください。
マニュアル
詳細

高トルク、高精度、安定したクローズドループ制御が必要なロボティクスアクチュエーター向けに設計されています。

RS485またはCANバス通信は、一般的なロボットコントローラーやドライブとの柔軟な統合をサポートします。
デュアル絶対エンコーダー(モーター + リデューサー)は、電源オフ後にゼロポイントを保持し、繰り返し位置決めを可能にします。
ピン定義により、統合中に電源の配線やRS485/CAN通信の選択が容易になります。

1:10の惑星リデューサーは、狭いアクチュエータースペースでのコンパクトなトルク出力に最適化されています。
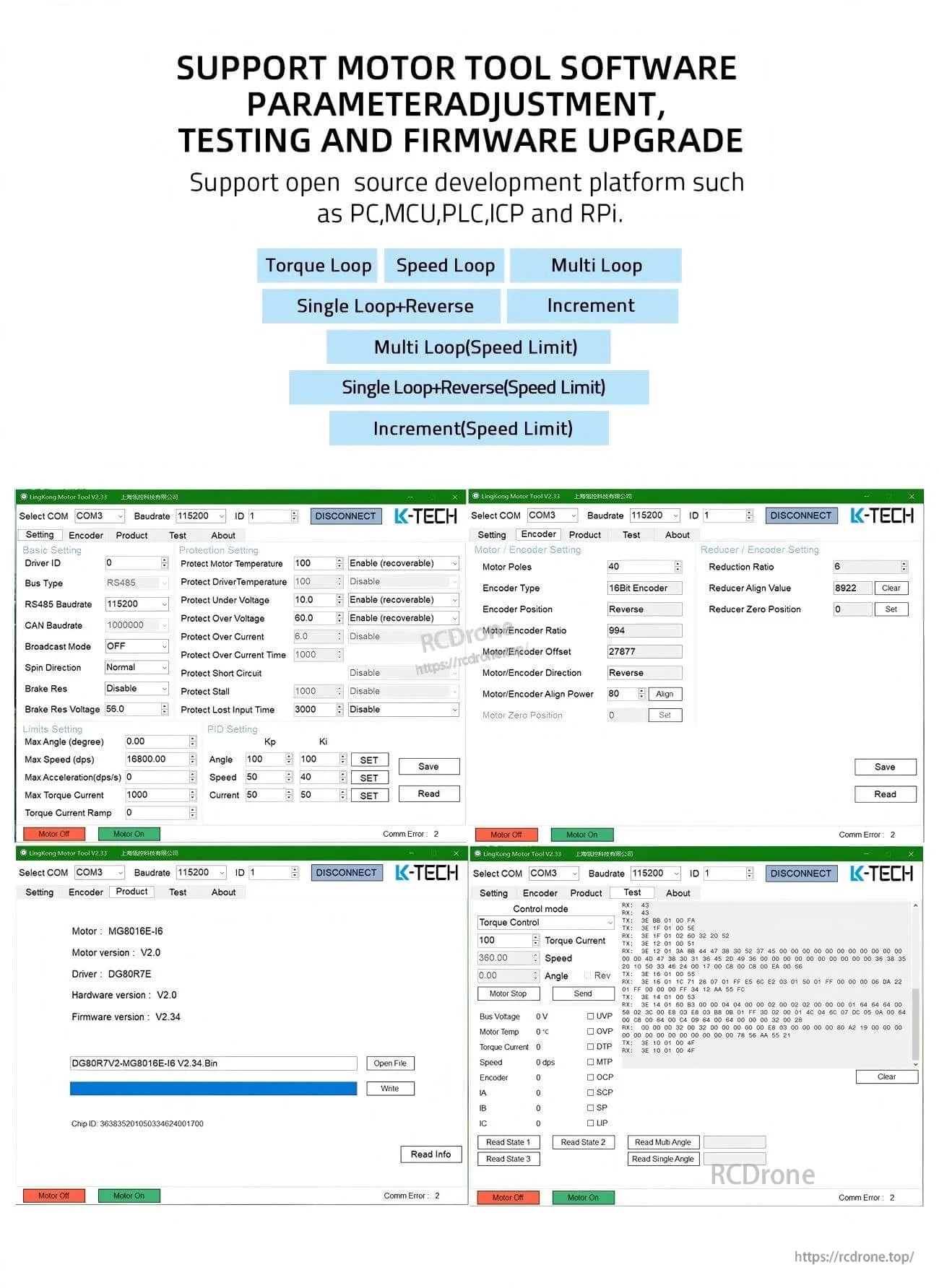
PCツールソフトウェアは、パラメータ調整、機能テスト、ファームウェアのアップグレードをサポートします。
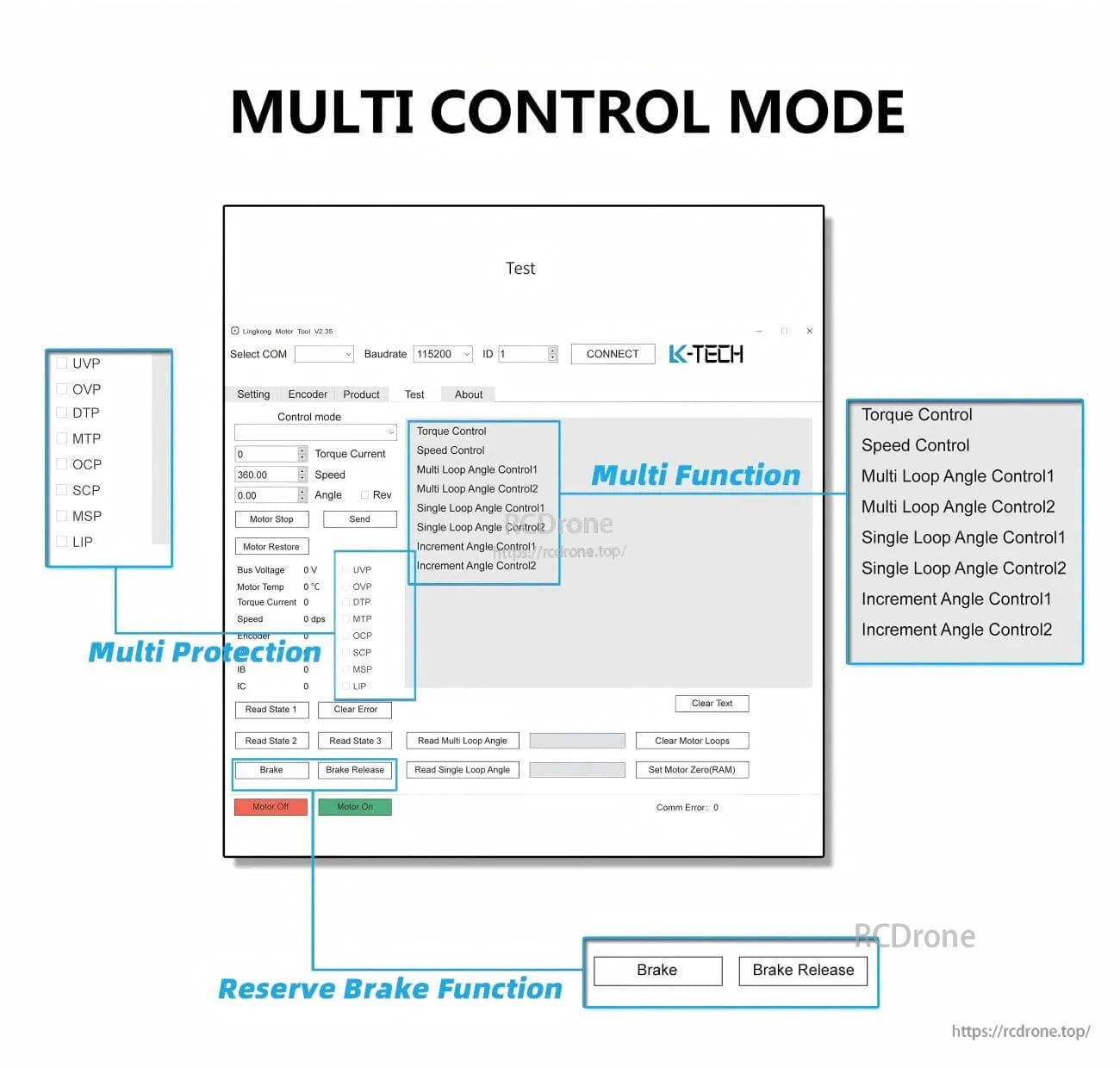
複数の制御モードと保護オプションがトルク、速度、位置ループのワークフローをサポートします。
正確なギアリングとフィードバックが必要なAGV、ロボットアーム、四足歩行ロボット、ウェアラブルロボットジョイントに適しています。
Related Collections




