




LKMTECH MG4010E-i10B-V3 プラネタリーギアモーター(ブレーキ付)、24V 320RPM、RS485/CAN、18ビットエンコーダ
LKMTECH MG4010E-i10B-V3 プラネタリーギアモーター(ブレーキ付)、24V 320RPM、RS485/CAN、18ビットエンコーダ
LKMTECH
通常価格
$348.00 USD
通常価格
セール価格
$348.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
LKMTECH MG4010E-i10B-V3モーターは、プラネタリーギアモーター で、ブレーキを備えており、コンパクトなサイズ、ギアトルク出力、フィールドバス通信(RS485またはCAN)を必要とするロボティクスおよび自動化アクチュエーター向けに設計されています。18ビットの磁気エンコーダを使用し、トルク、速度、位置制御ループをサポートしています。
主な特徴
- ブレーキ付き二段プラネタリーギアモーター(MG4010E-i10Bシリーズ)
- ギア比:1:10; ギアバックラッシュ:8アークミニット(≤8アークミニットとも指定)
- 18ビット単回転絶対磁気エンコーダ(18ビット磁気エンコーダ)
- 通信:RS485またはCAN
- 制御モード/ループ:トルクループ(32KHz)/速度ループ(8KHz)/位置ループ(4KHz)
- 加速曲線:台形加速
- 内蔵ブレーキ; ブレーキタイプBG4906; ブレーキトルク3。2 N.m
- インターフェース機能: IDスイッチ
- ドライブ関連のテキスト: 内蔵ブレーキ; RS485またはCANバス通信; デュアルエンコーダー、電源オフ後にゼロポイントを記憶; 入力電圧 12-60V
仕様
| アイテム名 | MG4010E-i10B-V3 |
| 定格電圧 | 24V |
| 最大速度 | 320RPM |
| 定格速度 | 260RPM |
| 定格トルク | 2.5N.m |
| 最大トルク | 4.5N.m |
| 定格電流 | 3.5A |
| 最大出力 | 140W |
| 速度定数 | 108.3rpm/V |
| トルク定数 | 0.07N.m/A |
| 回転 | 14 |
| 巻きタイプ | Y |
| 相抵抗 | 0.604Ω |
| 相インダクタンス | 0.28mH |
| モーターポール | 28 |
| ローター慣性 | 202gcm² |
| モーター温度 | はい |
| 減速機タイプ | PG4210 |
| 減速比 | 1:10 |
| バックラッシュ | ≤8 arcmin |
| ベアリング定格荷重 | 1000N |
| モーター重量 | 392g |
| ブレーキタイプ | BG4906 |
| ブレーキトルク (N.m) | 3.2N. |
| 起動電圧 (V) | 24V |
| 維持電圧 (V) | 7V |
| 維持電力 (W) | 1.4W |
| 推奨ドライブ | DG40 |
| ドライブ入力電圧 | 7。4-32V |
| 通信 | RS485またはCAN |
| 通信周波数 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| エンコーダ | 18ビット磁気エンコーダ |
| エンコーダボーレート(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| ボーレート(CAN) | 100K, 125K, 250K, 500K, 1M |
| 制御モード | トルクループ(32KHz)/スピードループ(8KHz)/ポジションループ(4KHz) |
| 加速曲線 | 台形加速 |
| モーターサイズ | Φ 59*37 |
| ギアバックラッシュ | 8アークミニット |
インターフェース定義
- IDスイッチ
| ポート | 説明書 |
|---|---|
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| V- | 負の電源 |
| V+ | 正の電源 |
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| T | UART 送信機 |
| R | UART 受信機 |
| G | 信号 GND |
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- 外骨格 / 外骨格ロボット
- 四足ロボット / メカ犬
- AGV 車両 / AGV 車
- ARU ロボット
- サービスロボット
- ハンドヘルドライダー
- リハビリ訓練ロボット
- 検査ロボット
マニュアル
統合サポートおよびプレセールスに関する質問は、[email protected] orに連絡するか、https://rcdrone.top/. をご覧ください。
詳細

統合ブレーキ、1:10の減速比、及び≤8アークミニバックラッシュを備えたコンパクトなMG4010E-i10B-V3プラネタリーギアモーターモーターは、精密なロボットジョイントに最適です。
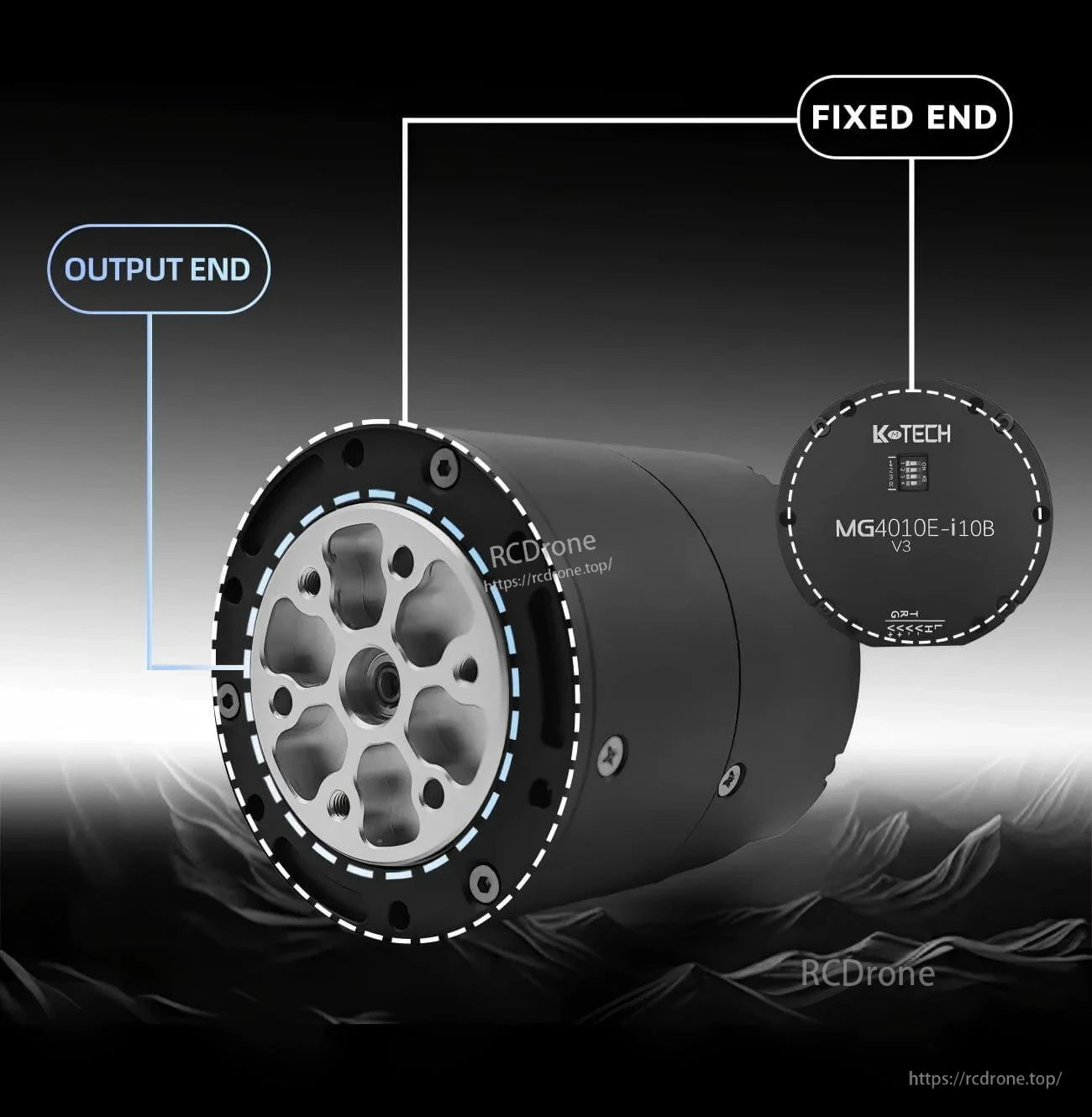
出力端と固定端の明確な識別は、統合時の機械レイアウトと配線の向きを簡素化するのに役立ちます。

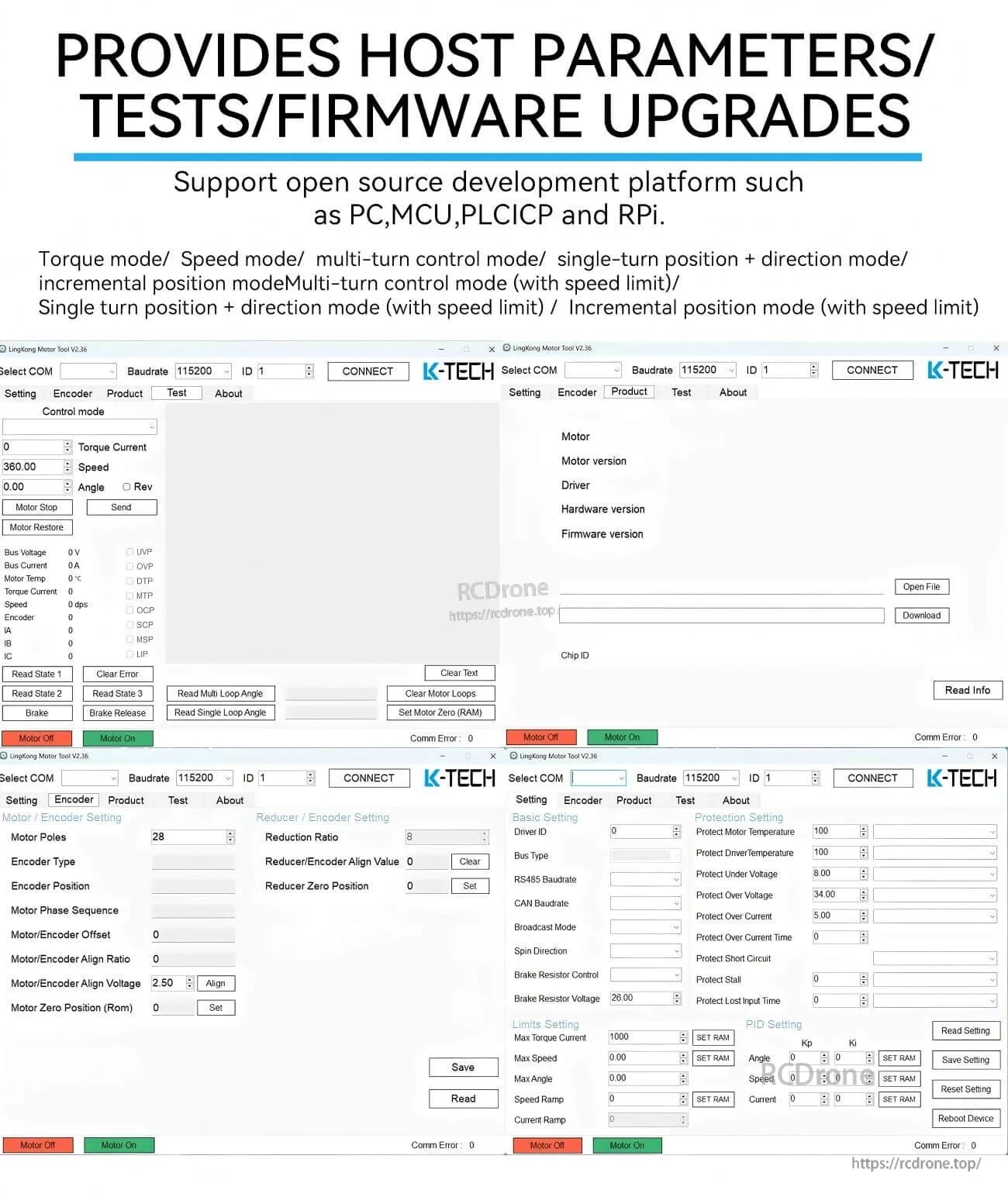
18ビットのシングルターン絶対磁気エンコーダとRS485/CANバスは、自動化アクチュエーターのトルク、速度、位置制御をサポートします。
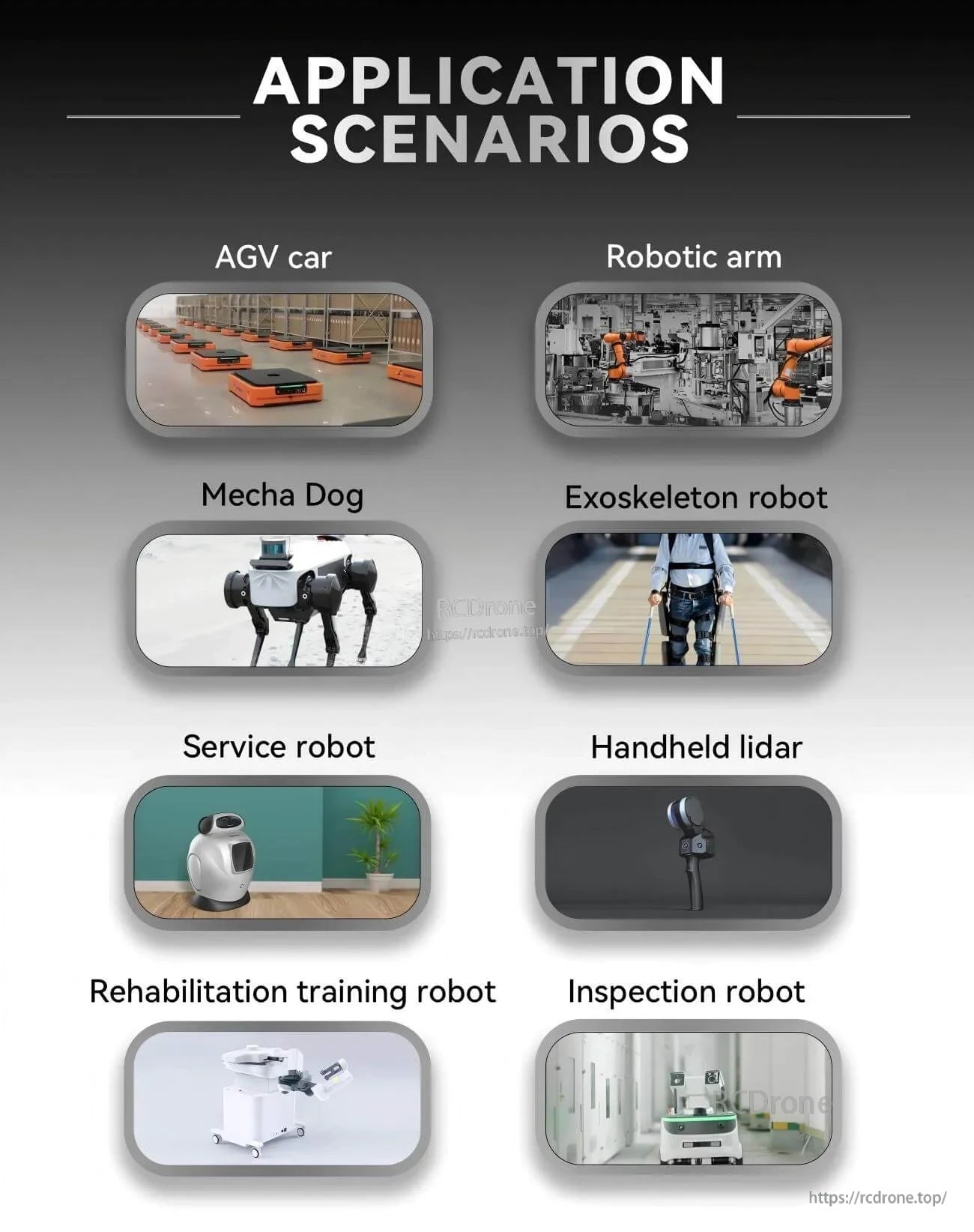
AGV、ロボットアーム、四足歩行ロボット、外骨格、検査プラットフォームなど、ロボティクスと自動化のユースケース向けに設計されています。
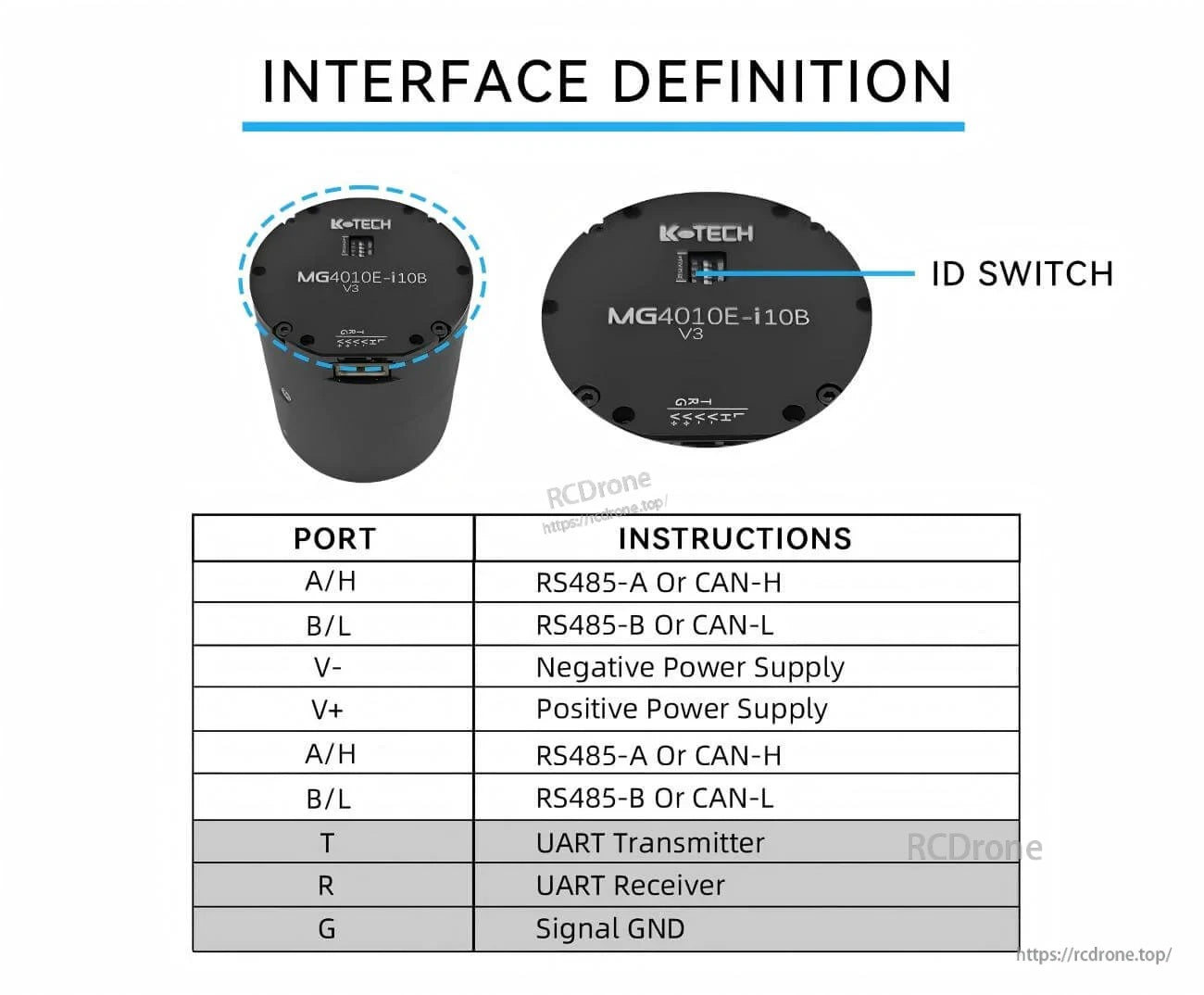
ポートマッピングには、RS485-A/CAN-HおよびRS485-B/CAN-L、さらに電源、UART TX/RX、信号グラウンド、オンボードIDスイッチが含まれます。

Related Collections




