




LKMTECH MG4010E-i36-V3 プラネタリーギアモーター 24V 1:36 RS485/CAN マグネティックエンコーダー ロボット用
LKMTECH MG4010E-i36-V3 プラネタリーギアモーター 24V 1:36 RS485/CAN マグネティックエンコーダー ロボット用
LKMTECH
通常価格
$411.00 USD
通常価格
セール価格
$411.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
このLKMTECH MG4010E-i36-V3 モーターは、惑星ギアモーター であり、ロボティクスおよびモーションコントロールアクチュエーター用に設計されています。ブラシレスモーター、惑星減速機、磁気エンコーダを組み合わせており、通信オプションはRS485またはCANとしてリストされています。
主な特徴
- 惑星ギアモーター (MG4010E-i36, V3)。
- ギア比: 1:36(「ギア比 1:36」とも表示されます)。
- ギアバックラッシュ: 7アークミニット(画像ラベル) / 12アークミニット(仕様表)。
- エンコーダ: 18ビット単回転絶対磁気エンコーダ(画像テキスト);また、18ビット(モーター) + 14ビット(減速機)磁気エンコーダ(仕様表)としてもリストされています。
- 通信: RS485またはCAN。
- ドライブ/FOCドライバー参照(画像テキスト: “高性能FOCドライバー”)。
- 内蔵ブレーキ(画像テキスト/UIラベル)。
- ホストパラメータ/テスト/ファームウェアアップグレードがサポートされています(画像テキスト)。
仕様
| アイテム名 | MG4010E-i36-V3 |
| 定格電圧 | 24V |
| 最大速度 | 90RPM |
| 定格速度 | 77RPM |
| 定格電流 | 2.4A |
| 最大出力 | 132W |
| 定格トルク | 6 N.m (仕様表) / 9 N.m (画像ラベル) |
| 最大トルク | 13 N.m (仕様表) / 18 N.m (画像ラベル) |
| 速度定数 | 3 rpm/V |
| トルク定数 | 2.58 N.m/A |
| 回転数 | 14 |
| 巻き線タイプ | Y |
| 相抵抗 | 0.68 Ω |
| 位相インダクタンス | 0.25 mH |
| モーターポール | 28 |
| ローター慣性 | 158 gcm² |
| モーター温度 | はい |
| 減速機タイプ | PG5336 |
| 減速比 | 1:36 |
| バックラッシュ | ≤12 arcmin (仕様表) / 6 arcmin (画像ラベル) |
| ベアリング定格荷重 | 1120 N |
| モーター重量 | 378 g |
| 推奨ドライブ | DG40E |
| ドライブ入力電圧 | 12-24V (仕様表) / 12-60V (画像ラベル) |
| 通信 | RS485 または CAN |
| 通信周波数 | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| エンコーダ | 18ビット(モーター)+ 14ビット(リデューサ)マグネティックエンコーダ |
| エンコーダボーレート(RS485) | 9600、19200、57600、115200、230400、406800、1M、2 Mbps |
| ボーレート(CAN) | 100K、125K、250K、500K、1M |
| 制御モード | トルクループ(24 KHz)/ スピードループ(8 KHz)/ ポジションループ(4 KHz) |
| 加速曲線 | 台形加速 |
| モーターサイズ | Φ 53*54。5 (画像ラベル) |
インターフェース定義
- IDスイッチ(画像ラベル:“ID SWITCH”)。
| ポート | 指示 |
|---|---|
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| V- | 負電源 |
| V+ | 正電源 |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
アプリケーションシナリオ
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足ロボット
- AGV車両 / AGVカー
- ARUロボット
- メカ犬
- サービスロボット
- ハンドヘルドライダー
- リハビリ訓練ロボット
- 検査ロボット
制御&ソフトウェアノート
- PC、MCU、PLC、ICP、RPiなどのオープンソース開発プラットフォームをサポートしています。
- モード一覧(画像テキスト):トルクモード、スピードモード、マルチターン制御モード、シングルターン位置 + 方向モード、インクリメンタル位置モード;スピード制限付きのバージョンも表示されています。
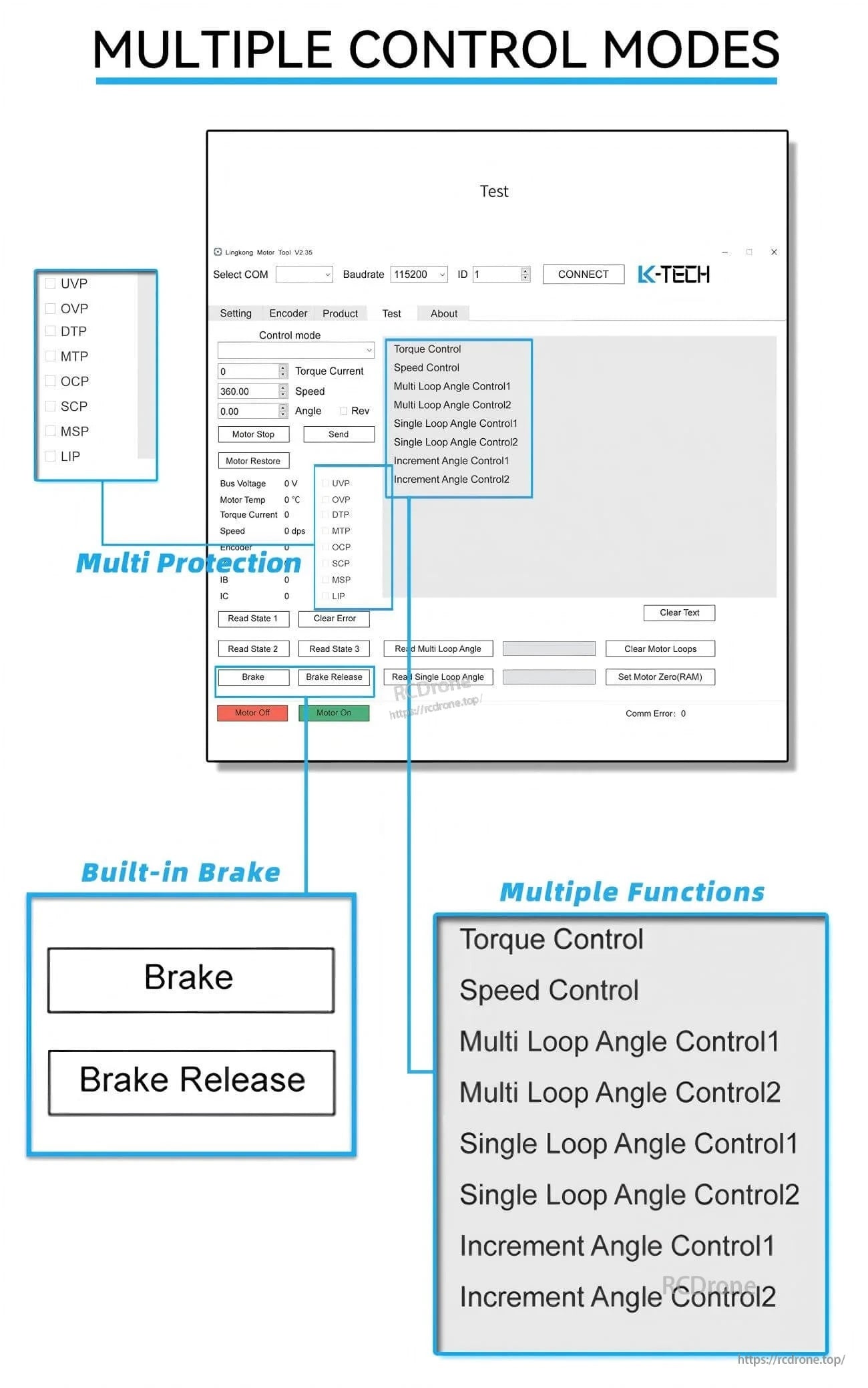
- UIに表示される複数の制御モード:トルク制御、スピード制御、マルチループ角度制御1、マルチループ角度制御2、シングルループ角度制御1、シングルループ角度制御2、インクリメント角度制御1、インクリメント角度制御2。
- 表示されるマルチ保護ラベル:UVP、OVP、DTP、MTP、OCP、SCP、MSP、LIP。
- 表示される内蔵ブレーキ制御:ブレーキ、ブレーキ解除。
販売前の互換性チェック(RS485/CAN統合、ボーレート選択)やファイルアクセスのヘルプについては、[email protected] orに連絡するか、https://rcdrone.top/. を訪問してください。
マニュアル / ドキュメント
詳細

MG4010E-i36-V3は、ブラシレスモーター、惑星ギア、磁気エンコーダを組み合わせたコンパクトなロボットアクチュエーターです。
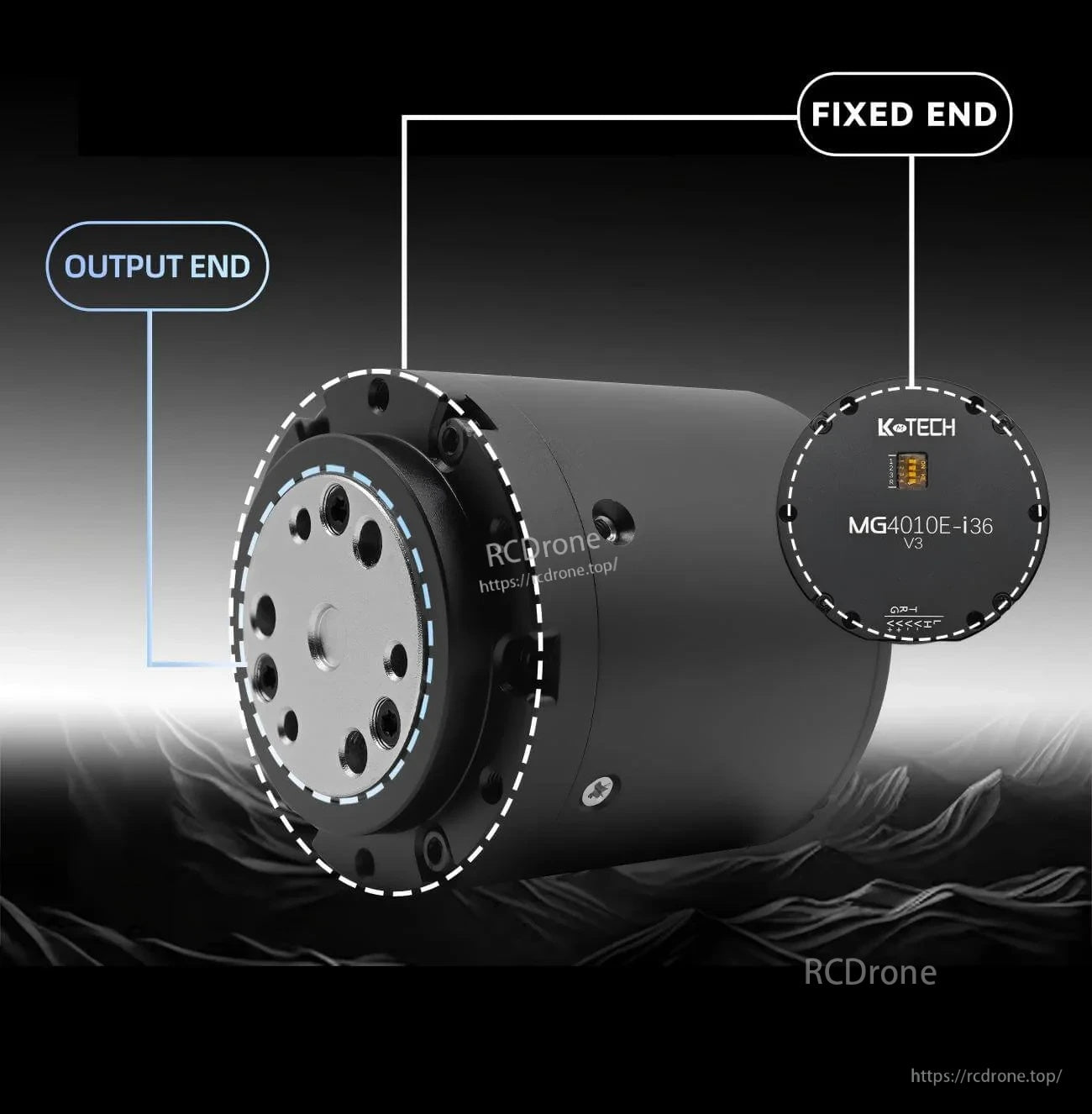
フランジスタイルの出力端と固定端のレイアウトにより、アーム、脚、その他のジョイントモジュールへの統合が容易になります。

RS485またはCAN通信は、FOCドライバーおよび絶対磁気エンコーダフィードバックと組み合わされ、安定したトルク、速度、位置制御を実現します。
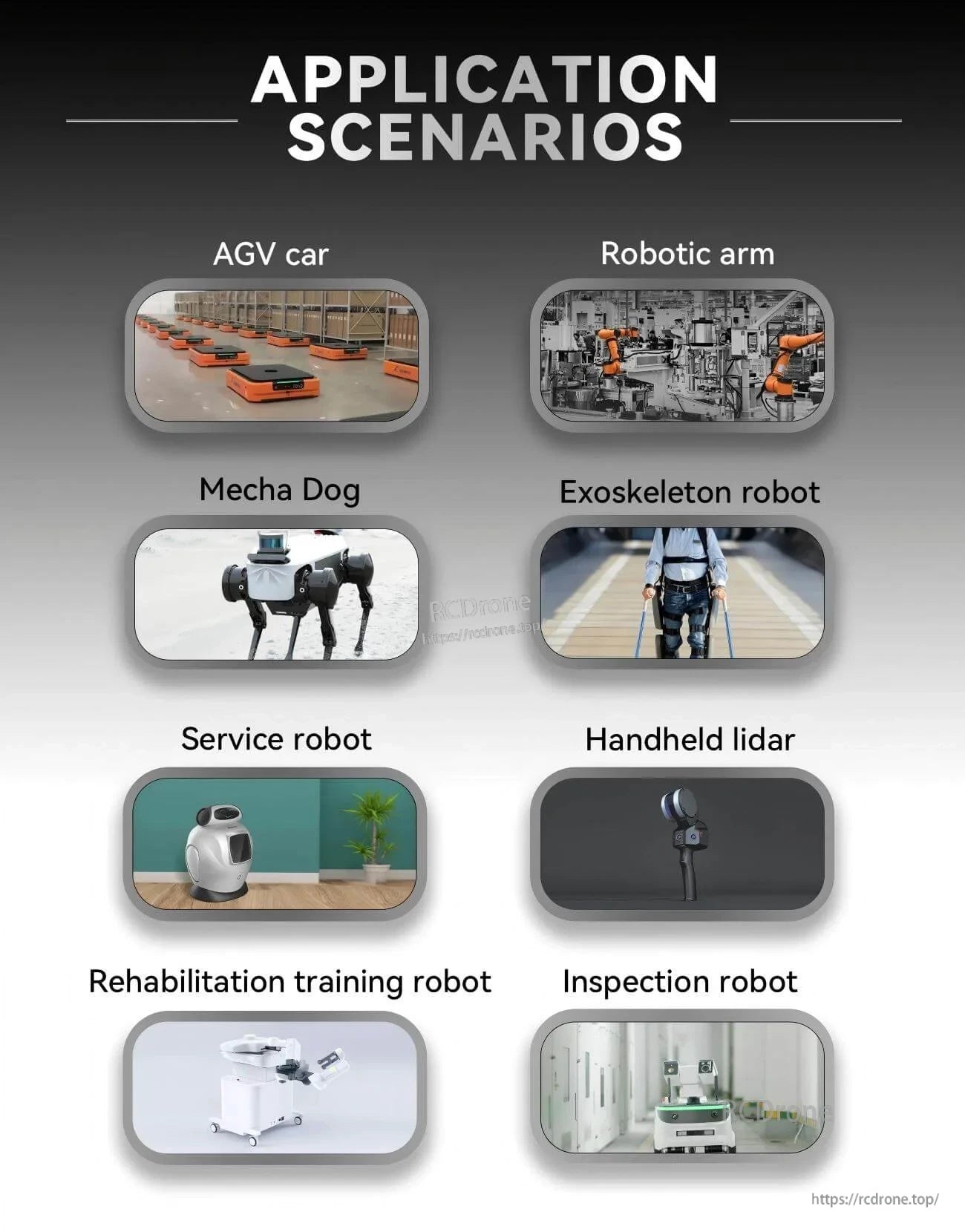
一般的な使用例には、AGV、ロボットアーム、四足プラットフォーム、外骨格、検査またはサービスロボットが含まれます。
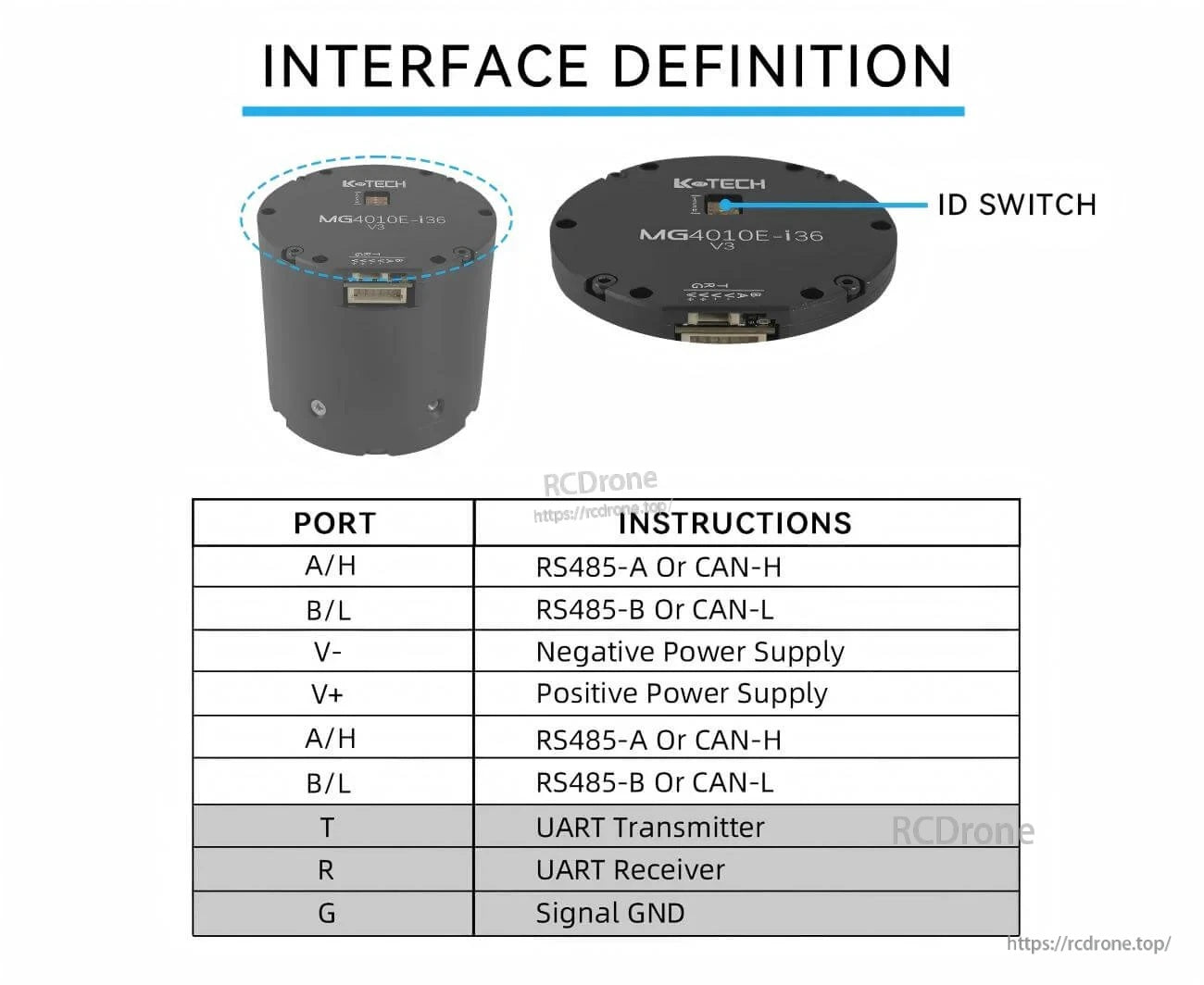
配線は、ラベル付きのRS485/CANバスピン、電源接続、UART Tx/Rx、信号グラウンド、およびオンボードIDスイッチにより簡素化されています。
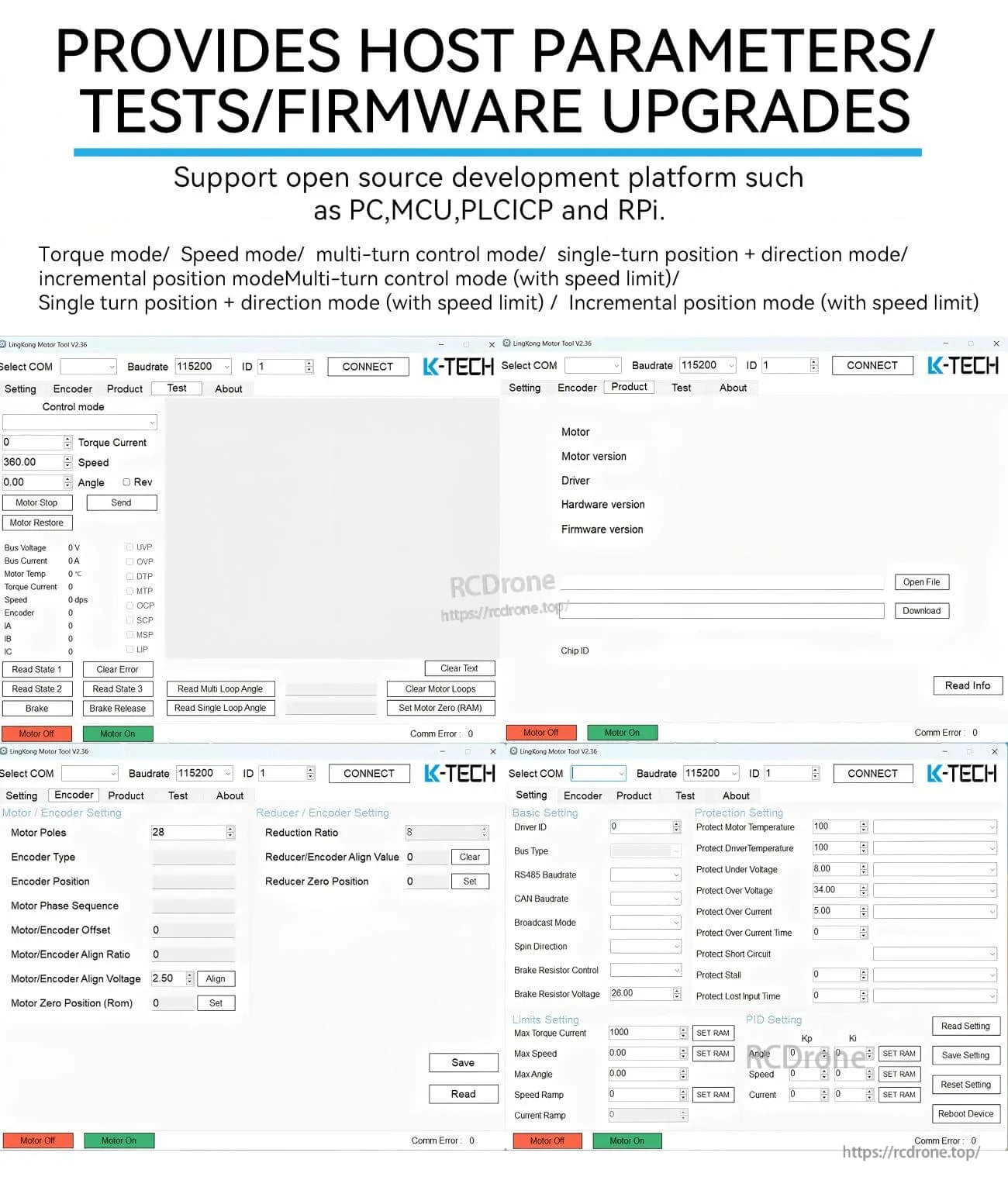
内蔵のブレーキ制御と複数の動作モードは、さまざまな動作制御タスクと安全要件に合わせて動作を調整するのに役立ちます。
Related Collections




