




LKMTECH MG4010E-i36B-V3 モーター 24V 1:36遊星ギアモーター(ブレーキ付)、RS485/CAN、磁気エンコーダ
LKMTECH MG4010E-i36B-V3 モーター 24V 1:36遊星ギアモーター(ブレーキ付)、RS485/CAN、磁気エンコーダ
LKMTECH
通常価格
$467.00 USD
通常価格
セール価格
$467.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
LKMTECH MG4010E-i36B-V3 モーターは、プラネタリーギアモーター で、ブレーキとエンコーダーフィードバックを統合しており、正確なトルク/速度/位置制御とコンパクトな統合が求められるロボティクスアクチュエーション用に設計されています。RS485またはCAN通信をサポートし、PG4210リデューサー(1:36)とデュアルマグネティックエンコーダー(18ビットモーター + 14ビットリデューサー)を指定しています。
主な特徴
- プラネタリーリデューサー: PG4210、減速比 1:36、バックラッシュ ≤12アークミニ
- エンコーダー: 18ビット(モーター) + 14ビット(リデューサー)マグネティックエンコーダー
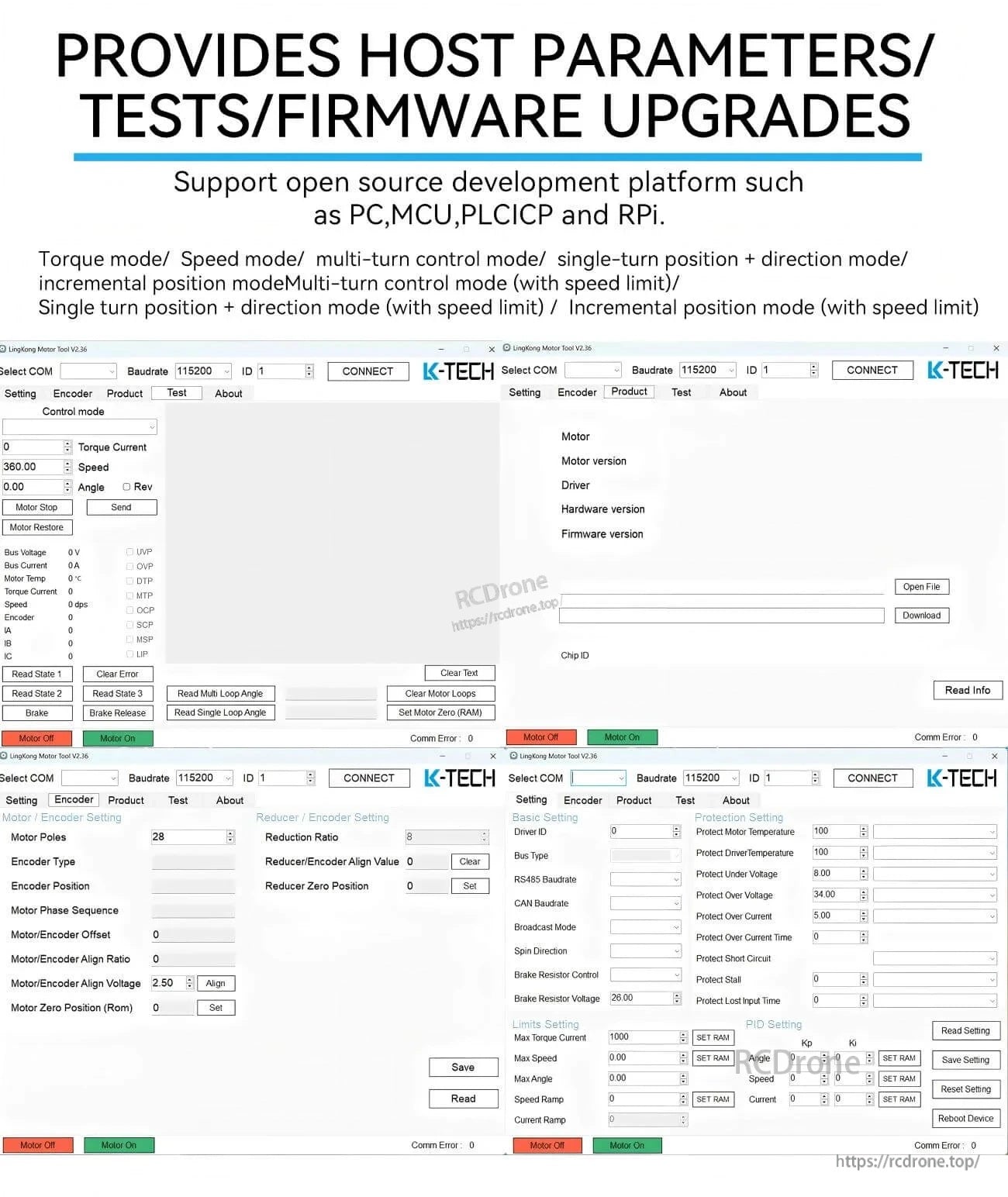
- 通信: RS485またはCAN
- 制御ループ: トルクループ (32KHz) / 速度ループ (8KHz) / 位置ループ (4KHz)
- 加速曲線: 台形加速
- ブレーキ: BG4906、ブレーキトルク 0.6N.m
- モーター温度: はい
技術仕様
| アイテム名 | MG4010E-i36B-V3 |
| 定格電圧 | 24V |
| 最大速度 | 90RPM |
| 定格速度 | 77RPM |
| 定格トルク | 6N.m |
| 最大トルク | 13N.m |
| 定格電流 | 2.4A |
| 最大出力 | 132W |
| 速度定数 | 3rpm/V |
| トルク定数 | 2.58N.m/A |
| 回転数 | 14 |
| 巻き方タイプ | Y |
| 相抵抗 | 0.68Ω |
| 相インダクタンス | 0.25mH |
| モーターポール | 28 |
| ローター慣性 | 158gcm² |
| モーター温度 | はい |
| 減速機タイプ | PG4210 |
| 減速比 | 1:36 |
| バックラッシュ | ≤12 arcmin |
| ベアリング定格荷重 | 1120N |
| モーター重量 | 542.5g |
| ブレーキタイプ | BG4906 |
| ブレーキトルク (N.m) | 0.6N.m |
| 起動電圧 (V) | 24V |
| 保持電圧 (V) | 7V |
| 保持電力 (W) | 1.4W |
| 推奨ドライブ | DG40E |
| ドライブ入力電圧 | 7.4-32V |
| 通信 | RS485またはCAN |
| 通信周波数 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| エンコーダ | 18ビット(モーター)+14ビット(減速機) 磁気エンコーダ |
| エンコーダボーレート (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| ボーレート (CAN) | 100K, 125K, 250K, 500K, 1M |
| 制御モード | トルクループ(32KHz)/スピードループ(8KHz)/位置ループ(4KHz) |
| 加速曲線 | 台形加速 |
インターフェース定義 (ポート)
このモーターシリーズのポートの意味:
- A/H: RS485-AまたはCAN-H
- B/L: RS485-BまたはCAN-L
- V-: 負電源
- V+: 正電源
- T: UARTトランスミッタ
- R: UARTレシーバー
- G: 信号GND
- IDスイッチ
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
マニュアル / ドキュメント
統合サポートおよび事前販売互換性チェックについては、[email protected] orに連絡し、 https://rcdrone.top/. を訪問してください。
詳細

コンパクトな惑星ギアモーター本体は、ブレーキとオンボードインターフェースを単一のアクチュエーターパッケージに統合しています。
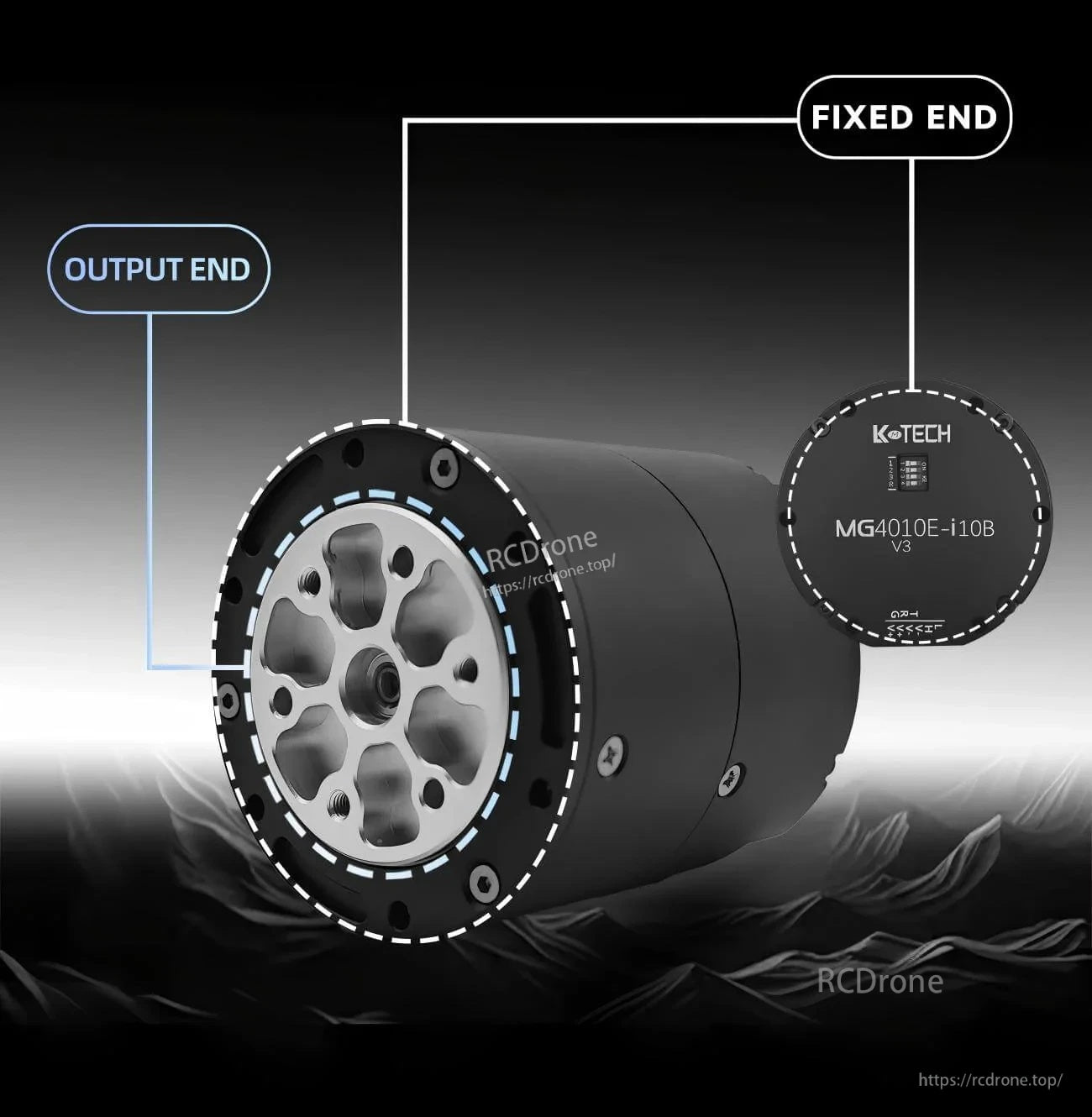
明確に定義された出力端と固定端は、アセンブリにおける機械的統合と整列を簡素化します。

エンコーダーフィードバックとバス通信は、ロボティクスジョイントの安定したトルク、速度、位置制御をサポートします。
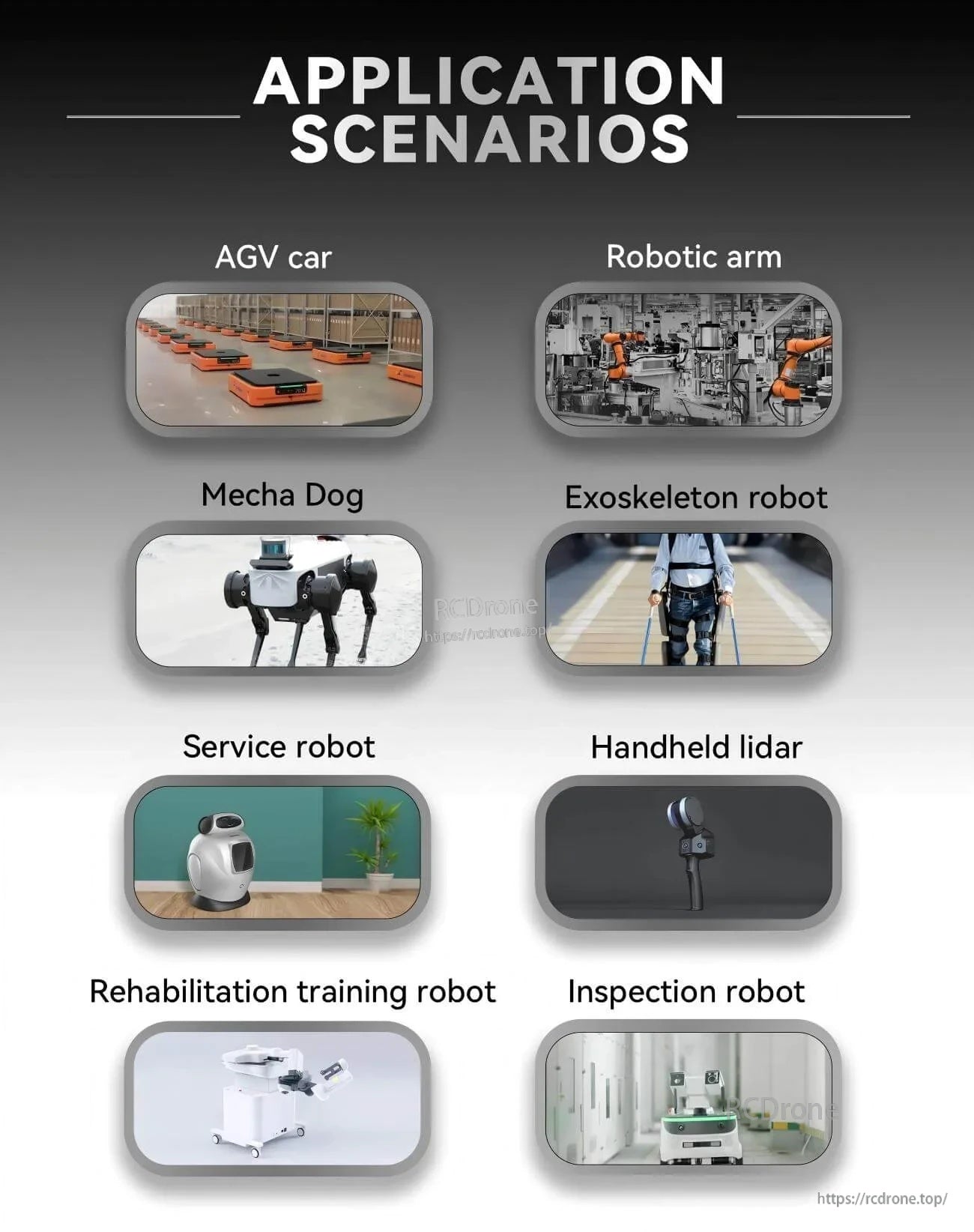
AGVやロボットアームから脚付きロボットや外骨格システムまで、ロボットアクチュエーションタスクのために設計されています。
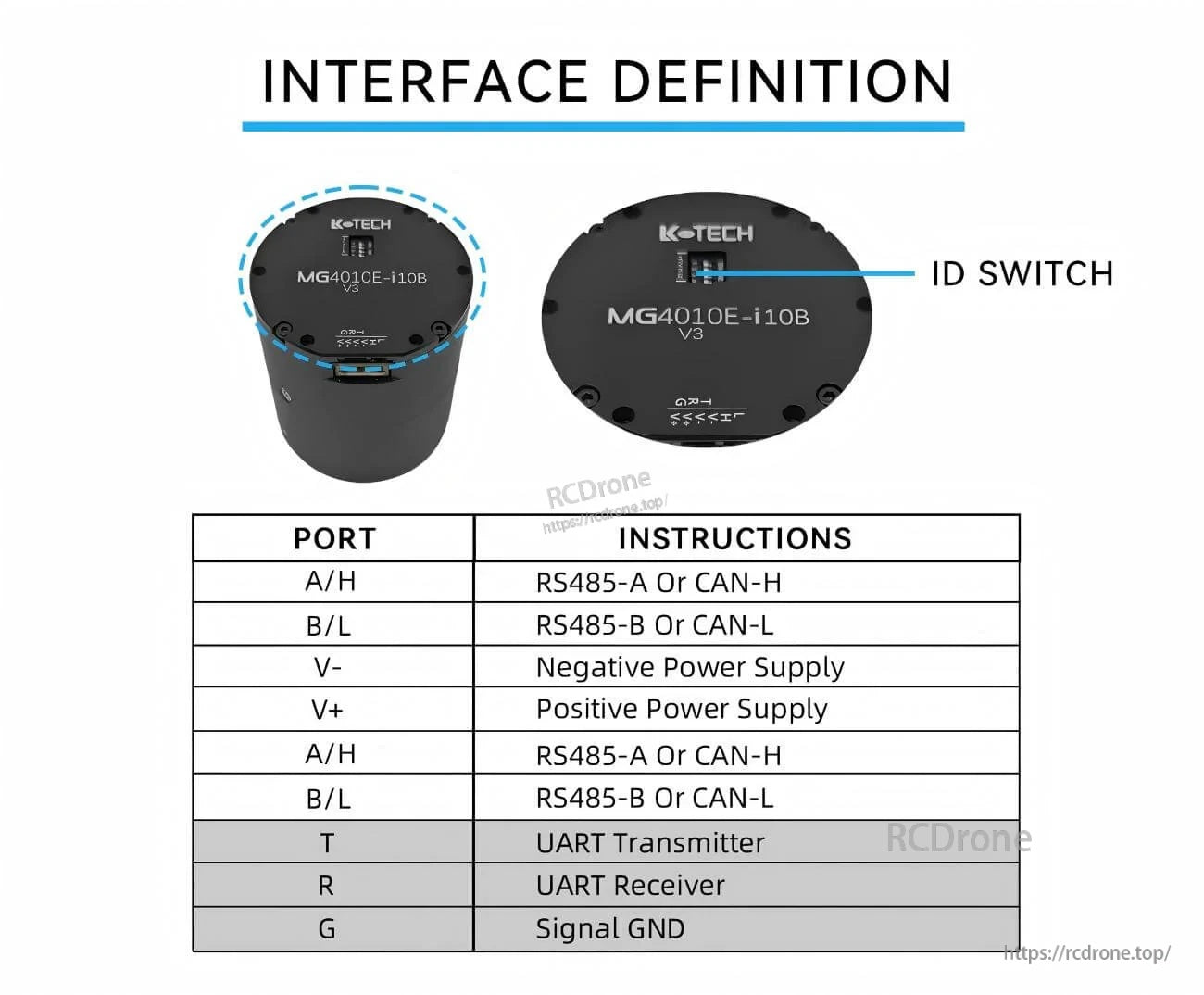
ポート定義は、電源、RS485/CAN配線、およびUARTピンをカバーし、アドレッシング用のオンボードIDスイッチを備えています。

Related Collections




