




LKMTECH MG5010E-i10-V3 モーター 24V 160W 1:10遊星ギア減速機、RS485/CAN、18ビットエンコーダ
LKMTECH MG5010E-i10-V3 モーター 24V 160W 1:10遊星ギア減速機、RS485/CAN、18ビットエンコーダ
LKMTECH
通常価格
$236.00 USD
通常価格
セール価格
$236.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
LKMTECH MG5010E-i10-V3 モーター は、ロボティクスおよびモーションコントロールアプリケーション向けのブラシレスモーターで、プラネタリーギアリデューサーと統合エンコーダーを備えています。24Vでの動作が指定されており、推奨ドライブを使用することでRS485またはCAN通信をサポートします。
主な特徴
- 高出力ブラシレスモーター + 高精度プラネタリーギアリデューサー
- 定格トルク 4 N.m; 最大トルク 7 N.m
- 減速比 1:10(リデューサータイプ: PG5110)
- 18ビット磁気エンコーダ(モーター側)
- 通信オプション: RS485またはCAN(推奨ドライブDG40E使用時)
- モーター温度: はい
- モーターとドライバーの温度をリアルタイムで監視するためのデュアル温度センサーインターフェース
- ドライブのハイライト: 入力電圧 7。4-32V; RS485またはCANバス通信; 電源オフ後のゼロポイントメモリを持つデュアルエンコーダ
仕様
| アイテム名 | MG5010E-i10-V3 |
| 定格電圧 | 24V |
| 最大速度 | 320RPM |
| 定格速度 | 235RPM |
| 定格トルク | 4 N.m |
| 最大トルク | 7 N.m |
| 定格電流 | 4.4A |
| 最大出力 | 160W |
| 速度定数 | 97.9 rpm/V |
| トルク定数 | 0.1 N.m/A |
| 回転数 | 13 |
| 巻き方タイプ | Y |
| 相抵抗 | 0.466Ω |
| 位相インダクタンス | 0.26mH |
| モーターポール | 28 |
| ローター慣性 | 850 gcm² |
| モーター温度 | はい |
| 減速機タイプ | PG5110 |
| 減速比 | 1:10 |
| バックラッシュ | 6 arcmin (≤8 arcminとも記載されています) |
| ベアリング定格荷重 | 1000N |
| モーター重量 | 420g |
| サイズ | Φ63*41.5 |
| 推奨ドライブ | DG40E |
| ドライブ入力電圧 | 7.4-32V |
| 通信 | RS485 または CAN |
| 通信周波数 | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| エンコーダ | 18ビット磁気エンコーダ |
| エンコーダボーレート (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| ボーレート (CAN) | 1M |
| 制御モード | トルクループ (32KHz) / スピードループ (8KHz) / ポジションループ (4KHz) |
| 加速曲線 | 台形加速 |
インターフェース定義
| インターフェース | 注意 |
|---|---|
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| V- | 負電源 |
| V+ | 正の電源 |
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン / ウェアラブルロボット
- 四足歩行ロボット / ロボット犬プラットフォーム
- AGV車両 / AGVカー
- ARUロボット
選定ガイダンスと統合サポートについては、https://rcdrone.top/までお問い合わせいただくか、メールで [email protected].
マニュアル
詳細

MG5010E-i10-V3は、ロボティクスとモーションコントロール用のコンパクトなアクチュエーターにブラシレスモーターとプラネタリーギアボックスを統合しています。

1:10のプラネタリーギアリデューサーは、ジョイントおよびホイールドライブビルドのために、より高いトルクと位置安定性を提供します。


モーター側の18ビット磁気エンコーダーは、正確なフィードバックをサポートします。一部のセットアップでは、補助リデューサー側エンコーダーも使用されます。
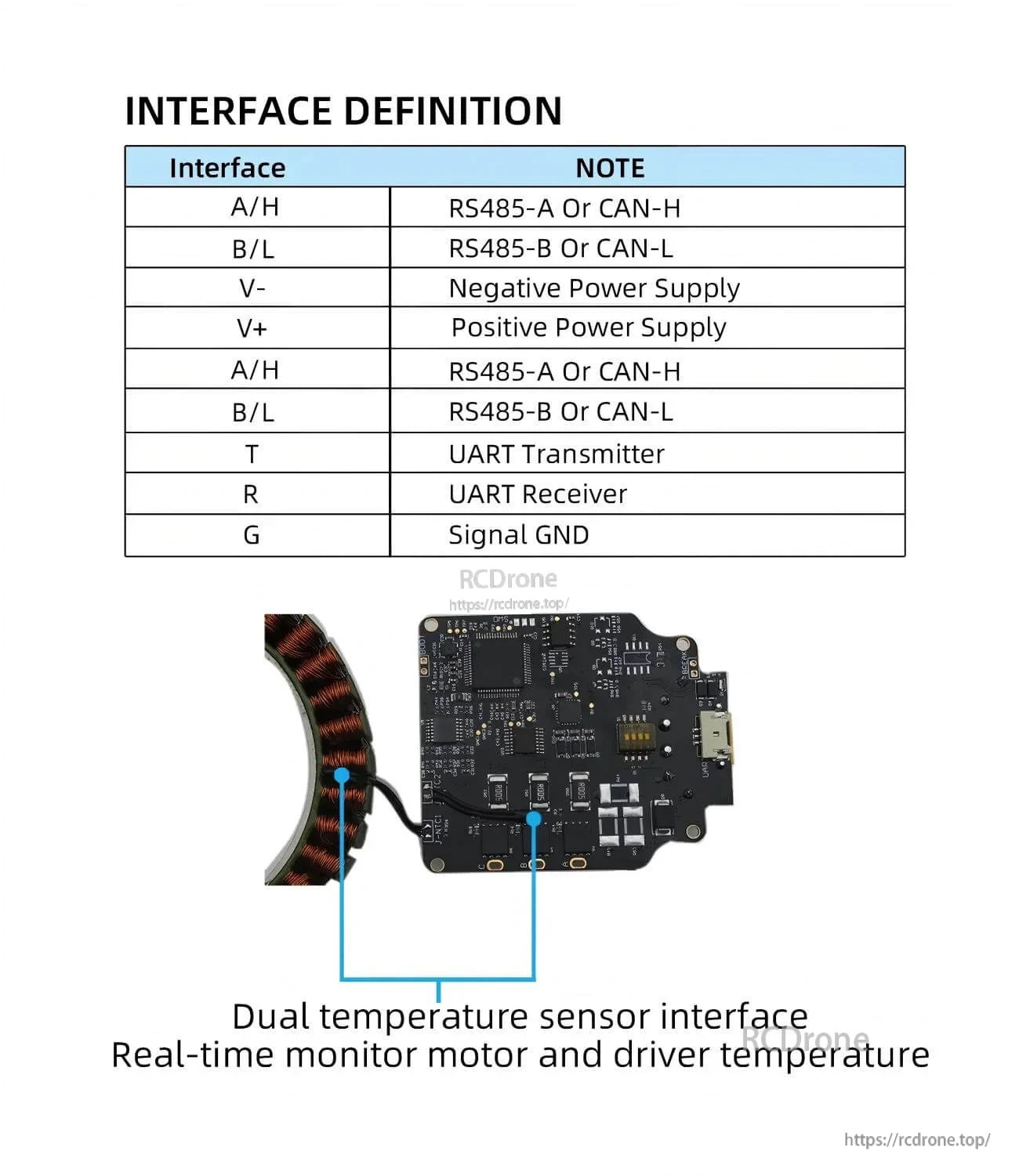
明確なピン定義とデュアル温度センサー入力により、配線が簡素化され、リアルタイムのモーター/ドライバーの熱監視が可能になります。
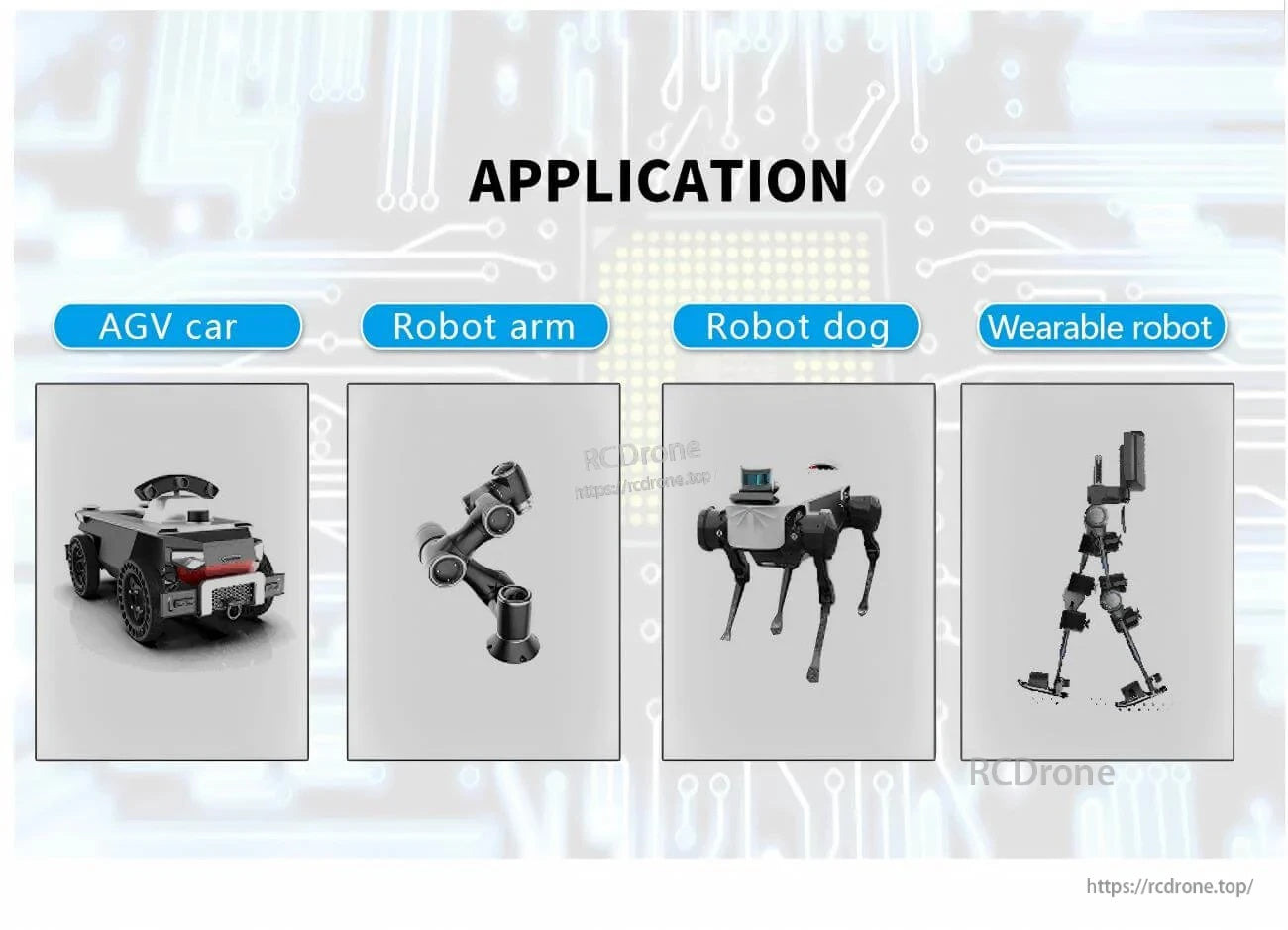 AGV、ロボットアーム、四足歩行ロボット、コンパクトなトルクが必要なウェアラブルロボットなどのプラットフォームに適しています。
AGV、ロボットアーム、四足歩行ロボット、コンパクトなトルクが必要なウェアラブルロボットなどのプラットフォームに適しています。
Related Collections




