




LKMTECH MG8015E-i9-V3 モーター 48V 670W 216RPM 14N.m プラネタリー減速機 1:9 RS485/CAN エンコーダ
LKMTECH MG8015E-i9-V3 モーター 48V 670W 216RPM 14N.m プラネタリー減速機 1:9 RS485/CAN エンコーダ
LKMTECH
受取状況を読み込めませんでした
概要
LKMTECH MG8015E-i9-V3モーターは、ロボティクスおよび自動化ジョイント向けの高出力、大トルク、高精度のモーターソリューションで、惑星ギア減速機とFOC制御ドライブオプションを備えています。RS485またはCANバス通信、デュアルエンコーダー(モーター + 減速機)、およびモーターとドライバーの温度をリアルタイムで監視するためのデュアル温度センサーインターフェースをサポートしています。
主な特徴
- 高出力ブラシレスモーター
- 高精度プラネタリーギアリデューサー
- 高性能FOC制御(ドライブ)
- 18ビット単回転絶対磁気エンコーダー
- デュアルエンコーダー; 電源オフ後にゼロポイントを記憶
- 入力電圧(ドライブ):12-60V
- RS485またはCANバス通信
- デュアル温度センサーインターフェース; モーターとドライバーの温度をリアルタイムで監視
- モーターツールソフトウェアのパラメータ調整、テスト、ファームウェアアップグレードをサポート
- PC、MCU、PLC、ICP、RPiなどのオープンソース開発プラットフォームをサポート
- マルチコントロールモード:トルク制御 / スピード制御 / マルチループ角度制御1 / マルチループ角度制御2 / シングルループ角度制御1 / シングルループ角度制御2 / インクリメント角度制御1 / インクリメント角度制御2
- マルチ保護:UVP、OVP、DTP、MTP、OCP、SCP、MSP、LIP
- リザーブブレーキ機能: ブレーキ / ブレーキ解除
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両 / AGVカー
- ARUロボット
- ロボット犬
- ウェアラブルロボット
仕様
| アイテム名 | MG8015E-i9-V3 |
| 定格電圧 | 48V |
| 最大速度 | 216RPM |
| 定格トルク | 14N. |
| 定格速度 | 177RPM |
| 定格電流 | 6.8A |
| 最大出力 | 670W |
| 最大トルク | 28N.m |
| 速度定数 | 40.5rpm/V |
| トルク定数 | 1.35N.m/A |
| 回転数 | 16 |
| 巻線タイプ | Y |
| 相抵抗 | 0.3Ω |
| 相インダクタンス | 0.32mH |
| モーターポール | 42 |
| ローター慣性 | 2570gcm² |
| モーター温度 | はい |
| 減速機タイプ | PG5509 |
| 減速比 | 1:9 |
| バックラッシュ | ≤6アーク分 |
| ベアリング定格荷重 | 1120N |
| モーター重量 | 705g |
| サイズ | Φ98*49.5 |
| 推奨ドライブ | DG60E |
| ドライブ入力電圧 | 12-60V |
| 通信 | RS485またはCAN |
| 通信周波数 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| エンコーダ | 18ビット(モーター) & 14ビット(減速機) 磁気エンコーダ |
| エンコーダボーレート(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| ボーレート(CAN) | 100000, 125000, 250000, 500000, 1M |
| 制御モード | トルクループ(32KHz)/スピードループ(8KHz)/位置ループ(4KHz) |
| 加速曲線 | 台形加速 |
インターフェース定義
| インターフェース | 注意 |
|---|---|
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| V- | 負の電源 |
| V+ | 正の電源 |
| A/H | RS485-A または CAN-H |
| B/L | RS485-B または CAN-L |
| T | UART 送信機 |
| R | UART 受信機 |
| G | 信号 GND |
マニュアル
統合に関する質問(RS485/CAN 設定、ボーレート選択、またはドライブマッチング)については、サポートに連絡してください https://rcdrone.top/ またはメール [email protected] .
詳細

MG8015E-i9-V3は、高トルクモーターとプラネタリーレデューサーをコンパクトなジョイント対応パッケージに組み合わせて、自動化を実現します。

モーターを12–60V入力とRS485またはCANバス制御をサポートするFOCドライブオプションと組み合わせることで、簡単に統合できます。

モーターとレデューサーに搭載されたデュアル絶対エンコーダーは、位置参照を保持し、電源オフ後の繰り返し可能なジョイント制御をサポートします。
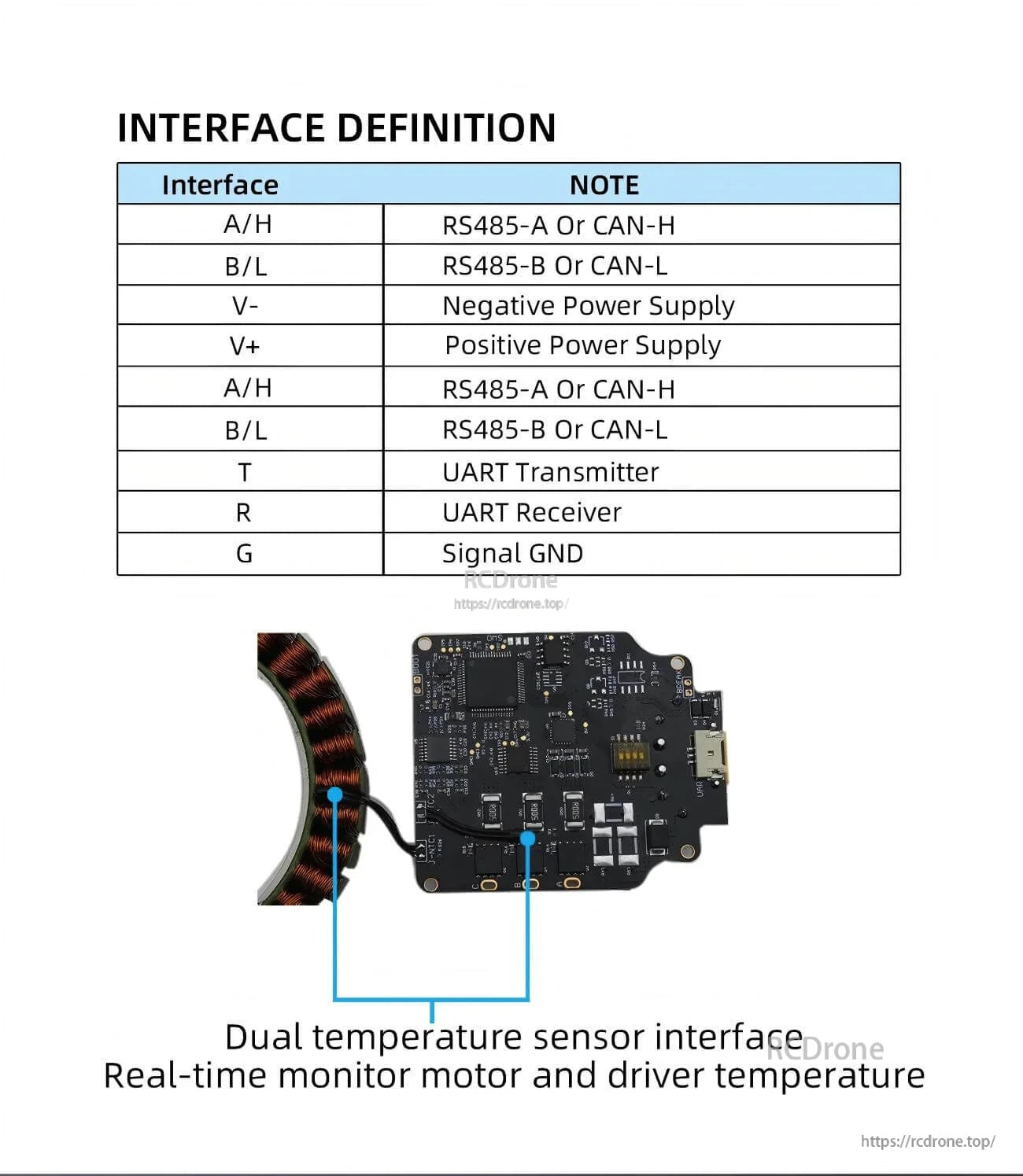
明確なピンマッピングとデュアル温度センサー入力により、配線が簡素化され、リアルタイムの熱監視が可能になります。

バックラッシュの少ない1:9プラネタリーレデューサーは、ロボットジョイントのスムーズな動作と安定したトルク出力をサポートします。
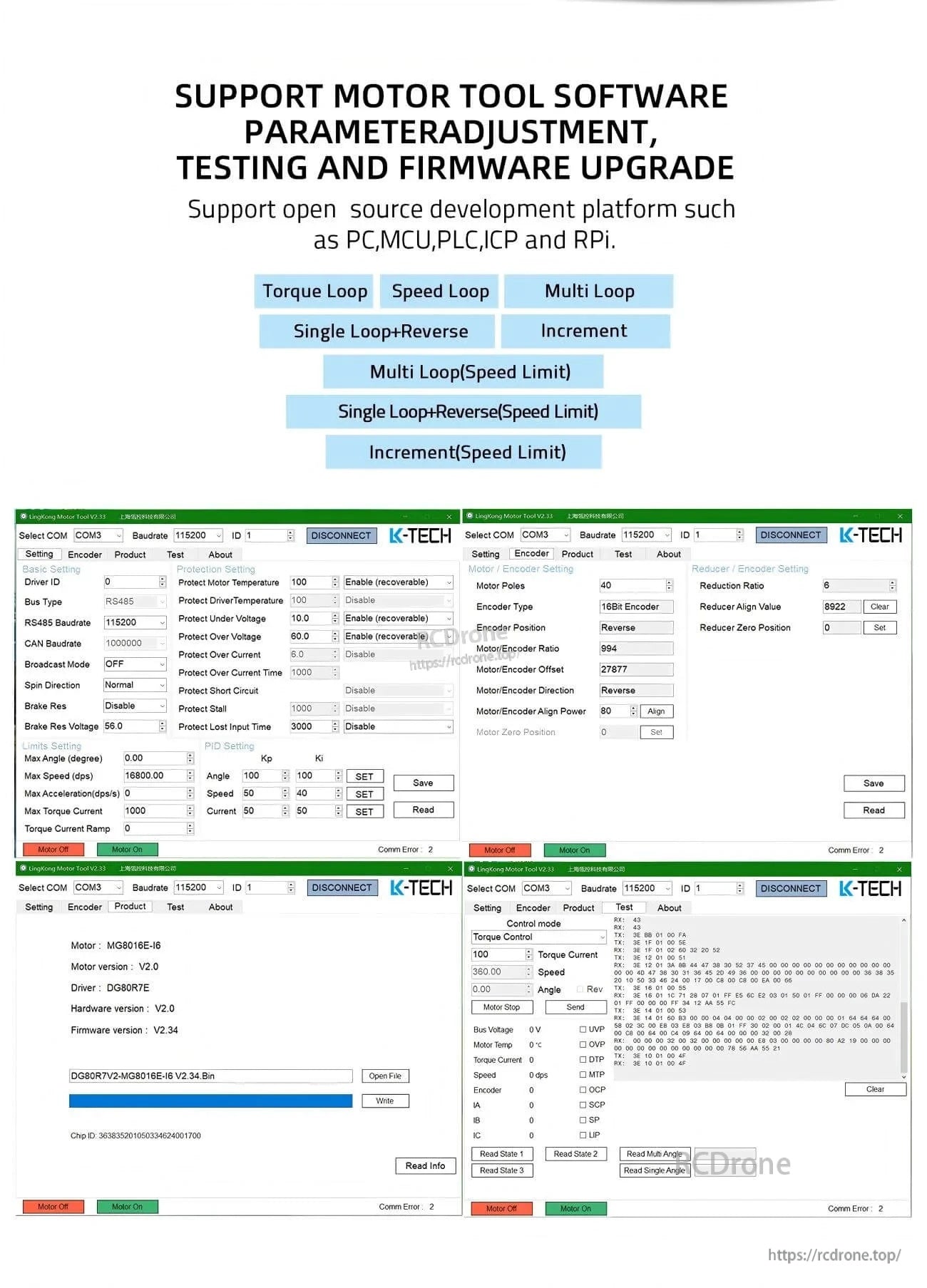
モーターツールソフトウェアは、セットアップおよび調整中のパラメータ調整、テスト、ファームウェアのアップグレードをサポートします。
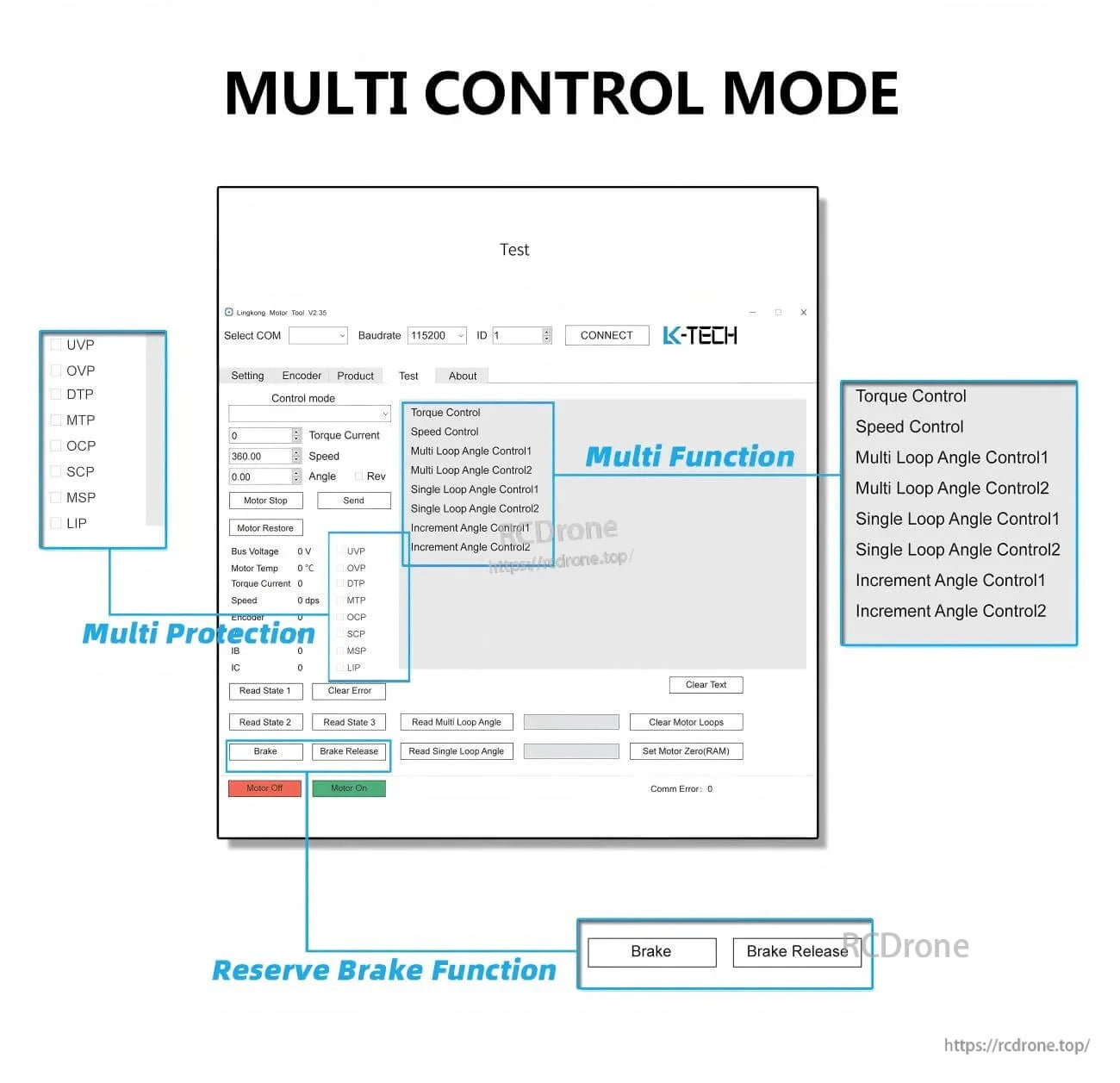
複数の制御モードに加え、保護機能やブレーキコマンドが柔軟な動作制御戦略をサポートします。
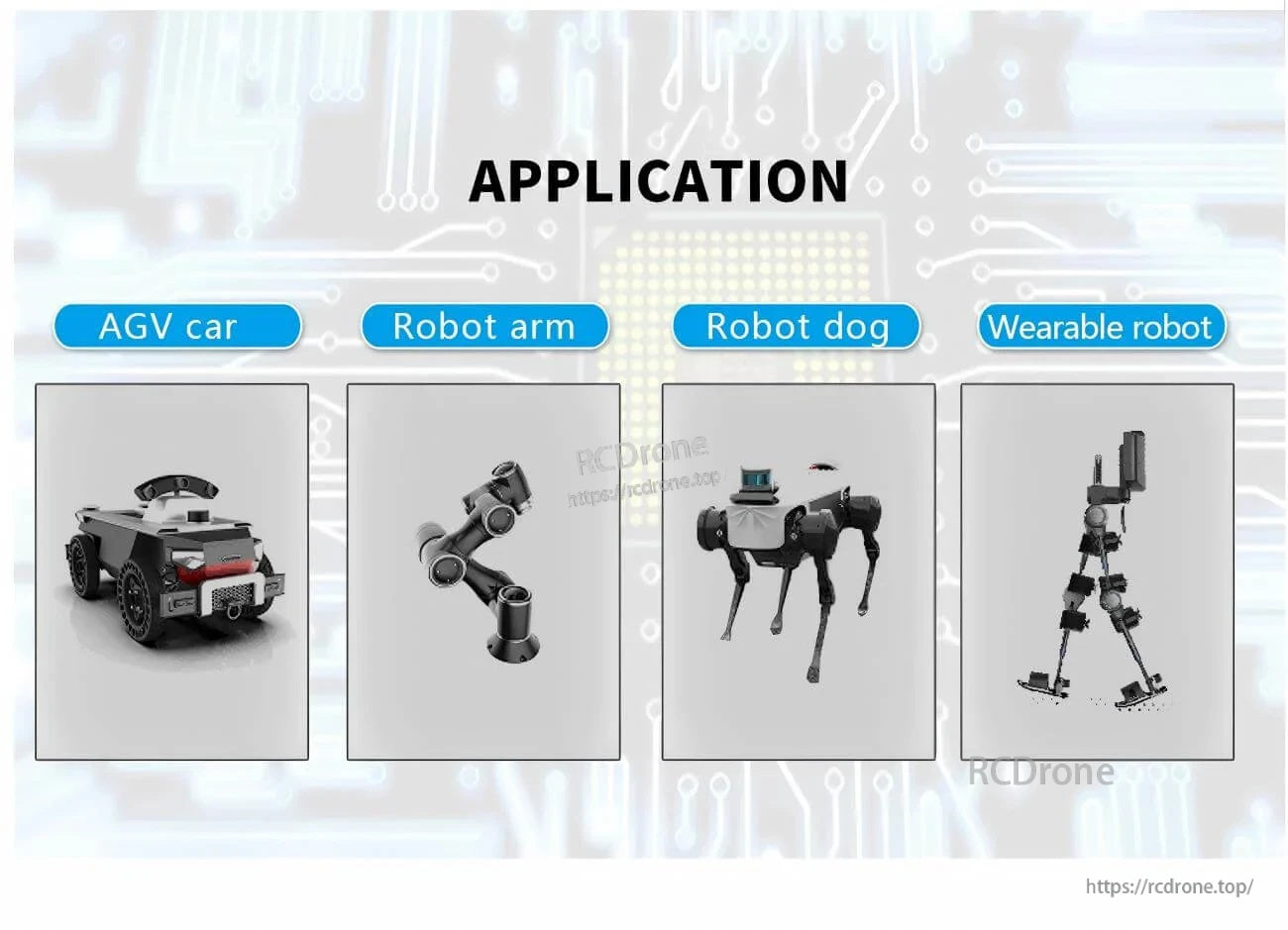
AGVやロボットアーム、四足歩行ロボット、ウェアラブルロボットなどのロボティクスおよびモビリティプラットフォーム向けに設計されています。
Related Collections




