




LKMTECH MG8016E-i6-V2 モーター 48V 670W 12N.m 定格トルク プラネタリー減速機 1:6 RS485/CAN
LKMTECH MG8016E-i6-V2 モーター 48V 670W 12N.m 定格トルク プラネタリー減速機 1:6 RS485/CAN
LKMTECH
通常価格
$495.00 USD
通常価格
セール価格
$495.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
このLKMTECH MG8016E-i6-V2 モーターは、ロボットの駆動および動作制御アプリケーション向けのブラシレスモーターで、統合された惑星ギアと磁気エンコーダを備えています。48Vでの動作が指定されており、互換性のあるドライブと使用することで、RS485またはCANを介した制御と通信をサポートします。
主な特徴
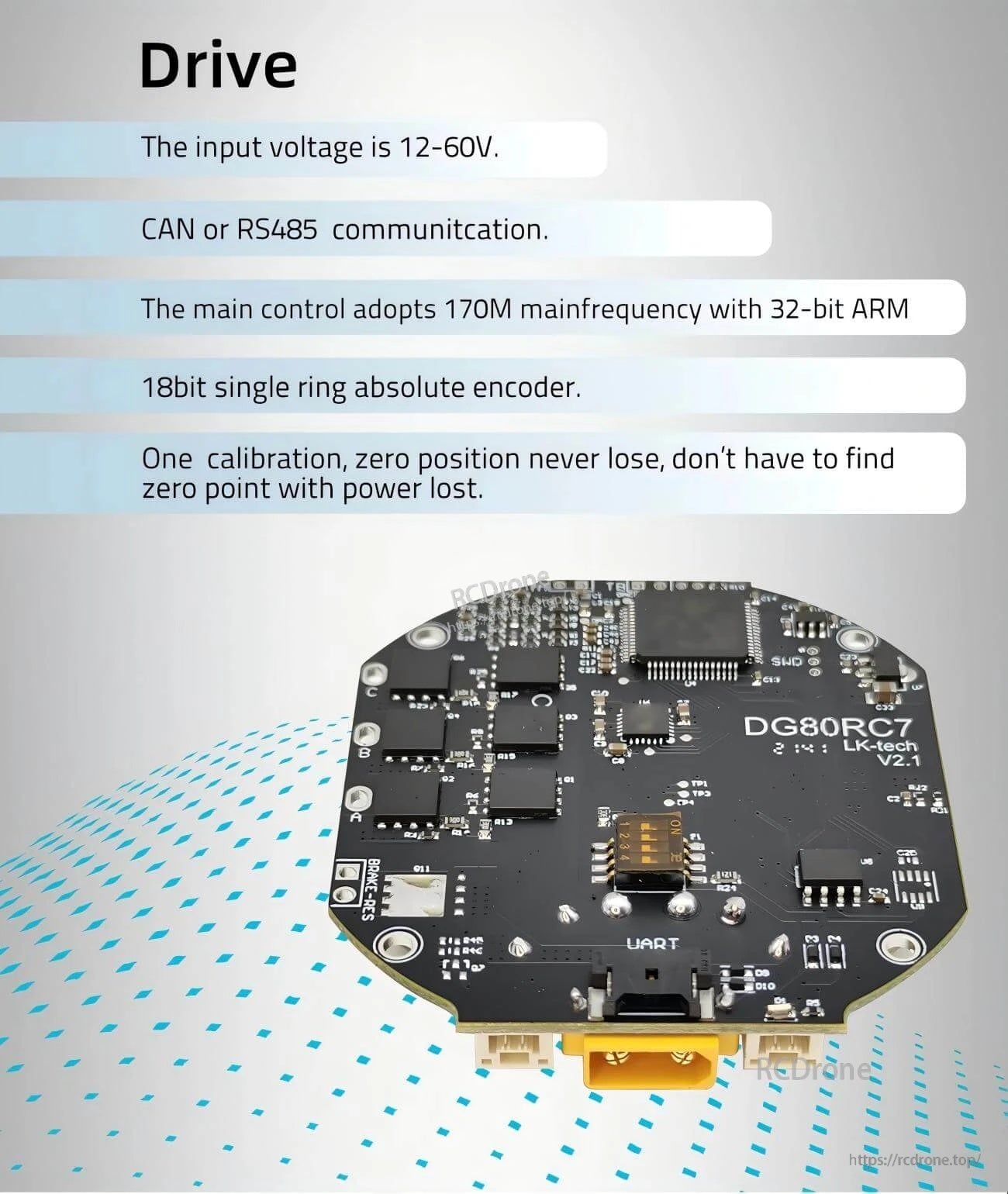
- 高出力、トルクが大きい、高精度
- 高出力ブラシレスモーター
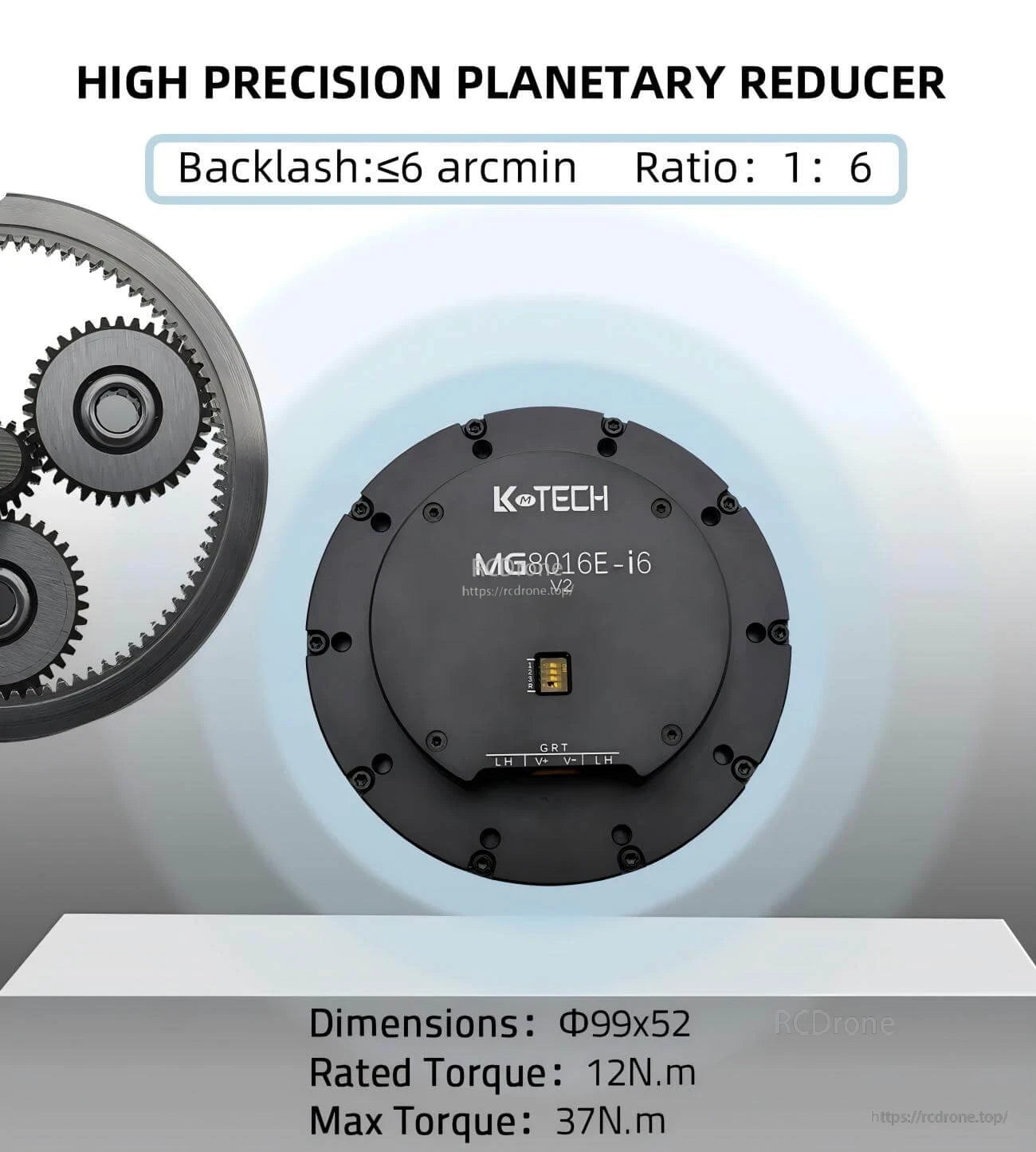
- 高精度プラネタリーレデューサー(バックラッシュ ≤6 アーク分、比率 1:6)
- 磁気エンコーダー:18ビット(モーター)および14ビット(レデューサー)
- 絶対位置認識(単一回転);1回のキャリブレーションで、電源喪失後もゼロ位置が失われない
- 通信:RS485またはCAN(指定された通信周波数で)
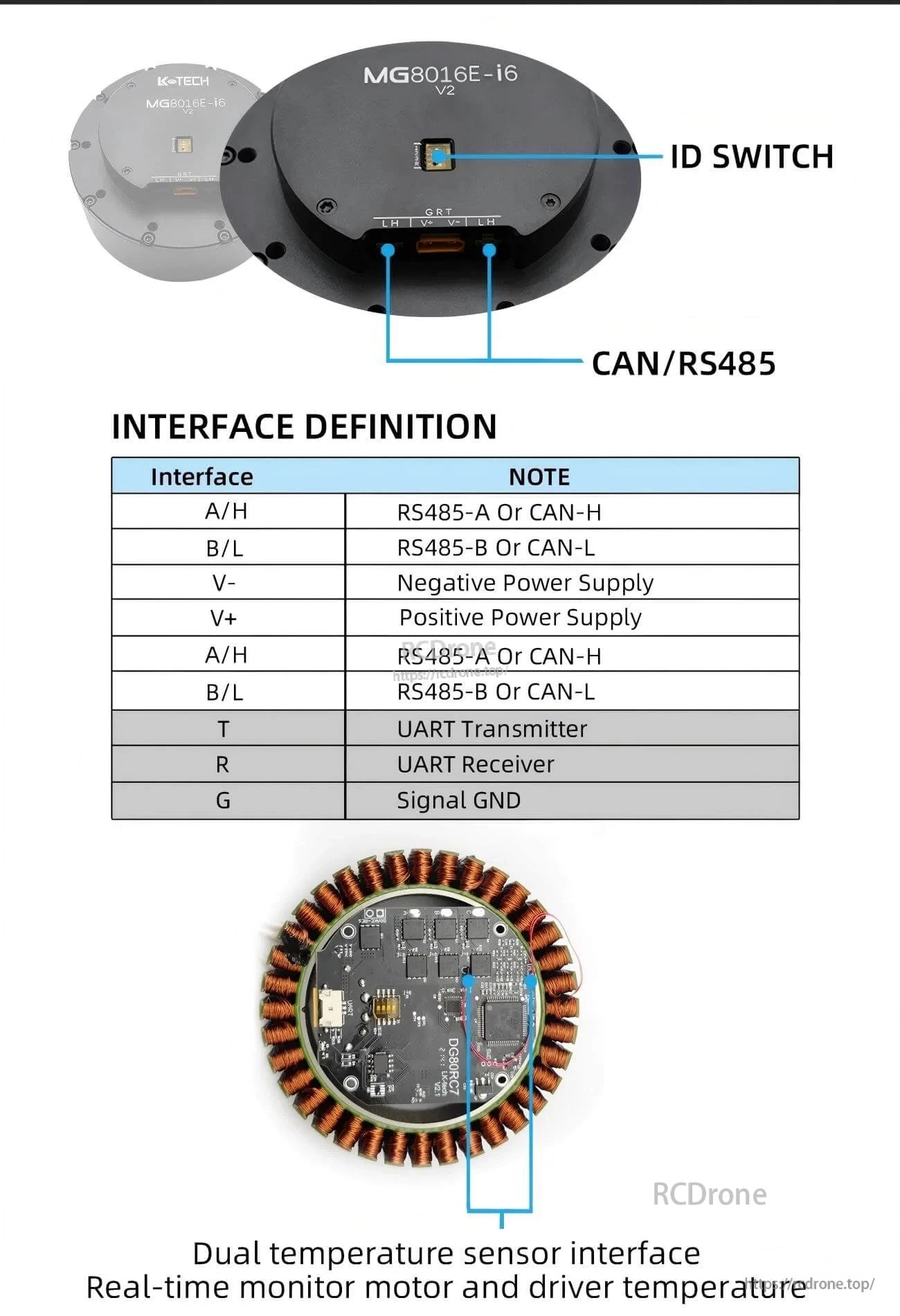
- モーターおよびドライバーの温度をリアルタイムで監視するためのデュアル温度センサーインターフェース
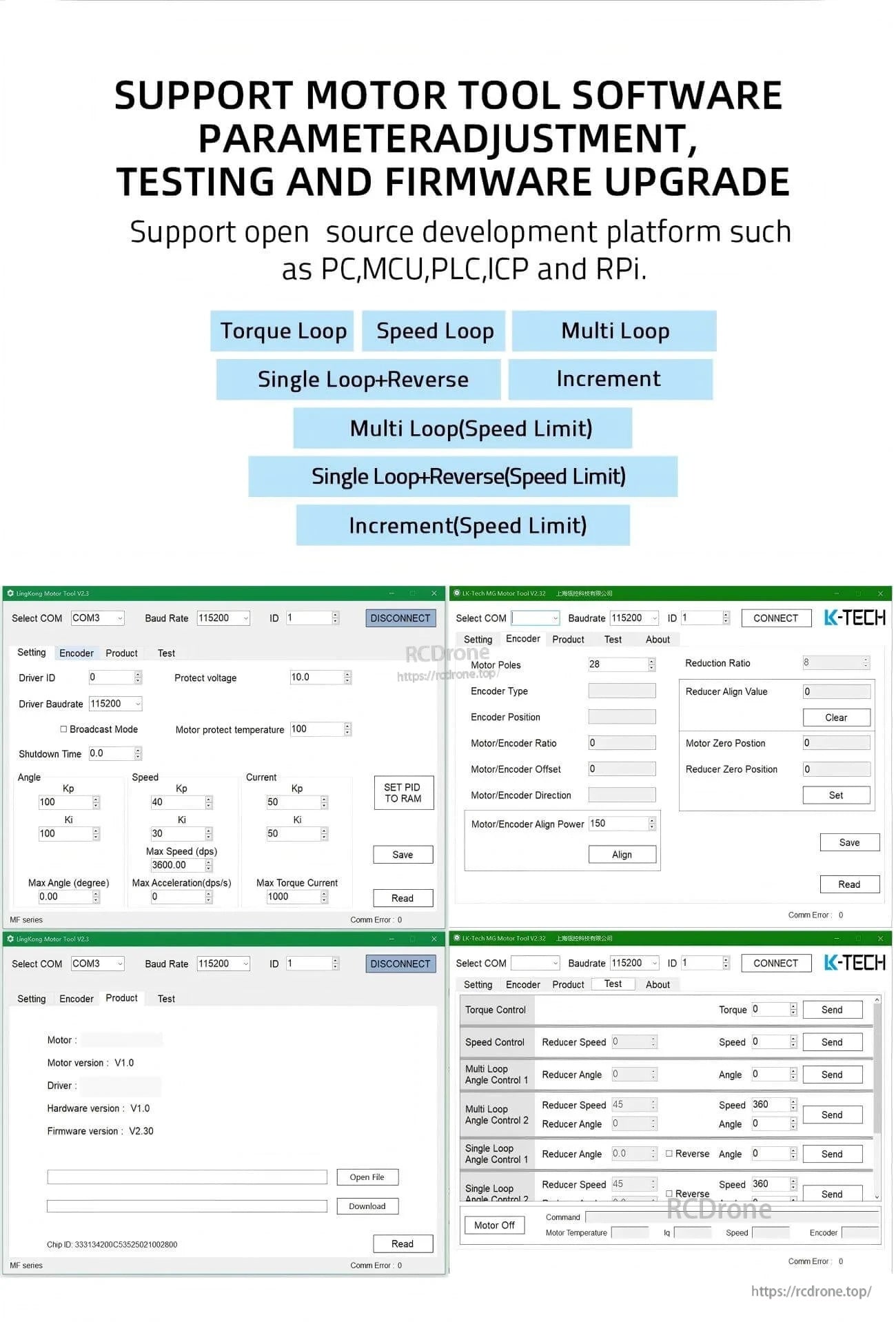
- パラメータ調整、テスト、ファームウェアアップグレードのためのモーターツールソフトウェアをサポート;PC、MCU、PLC、ICP、RPiなどのオープン開発プラットフォームをサポート
販売前の互換性チェックおよび統合サポートについては、https://rcdrone.top/ に連絡するか、[email protected]にメールしてください.
仕様
| アイテム名 | MG8016E-i6-V2 |
| 定格電圧 | 48V |
| 最大速度 | 300RPM |
| 定格トルク | 12N.m |
| 定格速度 | 258RPM |
| 定格電流 | 8.4A |
| 最大出力 | 670W |
| 最大トルク | 37N.m |
| 速度定数 | 41.7rpm/V |
| トルク定数 | 0.24N.m/A |
| 回転数 | 17 |
| 巻き方タイプ | Δ |
| 相抵抗 | 0.6Ω |
| 相インダクタンス | 0.6mH |
| モーターポール | 40 |
| ローター慣性 | 2570gcm² |
| モーター温度 | はい |
| 減速機タイプ | PG5506 |
| 減速比 | 1:6 |
| バックラッシュ | ≤6 arcmin |
| ベアリング定格荷重 | 1120N |
| モーター重量 | 759g |
| 寸法 | Φ99x52 |
| 推奨ドライブ | DG60E |
| ドライブ入力電圧 | 12-60V |
| 通信 | RS485またはCAN |
| 通信周波数 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| エンコーダ | 18ビット(モーター)&14ビット(リデューサー)マグネティックエンコーダ |
| エンコーダボーレート(RS485) | 9600、19200、57600、115200、230400、406800、1M、2Mbps |
| ボーレート(CAN) | 1M |
| 制御モード | トルクループ(32KHz)/スピードループ(8KHz)/ポジションループ(4KHz) |
| 加速曲線 | 台形加速 |
インターフェース定義
| A/H | RS485-AまたはCAN-H |
| B/L | RS485-BまたはCAN-L |
| V- | 負電源 |
| V+ | 正電源 |
| A/H | RS485-AまたはCAN-H |
| B/L | RS485-BまたはCAN-L |
| T | UARTトランスミッター |
| R | UART受信機 |
| G | 信号GND |
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン / ウェアラブルロボット
- 四足ロボット(ロボット犬)
- AGV車両(AGVカー)
- ARUロボット
マニュアル
詳細




Related Collections




