




MagicLab P110モーター 360N·mピークトルク、デュアルエンコーダ、CAN/EtherCATジョイントドライブ(ヒューマノイドロボット用)
MagicLab P110モーター 360N·mピークトルク、デュアルエンコーダ、CAN/EtherCATジョイントドライブ(ヒューマノイドロボット用)
MagicLab
通常価格
$5,283.00 USD
通常価格
セール価格
$5,283.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
MagicLab P110モーターは、ロボット関節用に設計された高トルクジョイントドライブモーターで、デュアルエンコーダーシステムと高速通信オプション(CAN / EtherCAT)を備えています。これは、フルサイズのヒューマノイドロボットや産業用の大型四足ロボットにおける高負荷ジョイント、例えば脚アクチュエーターに適しています。
主な特徴
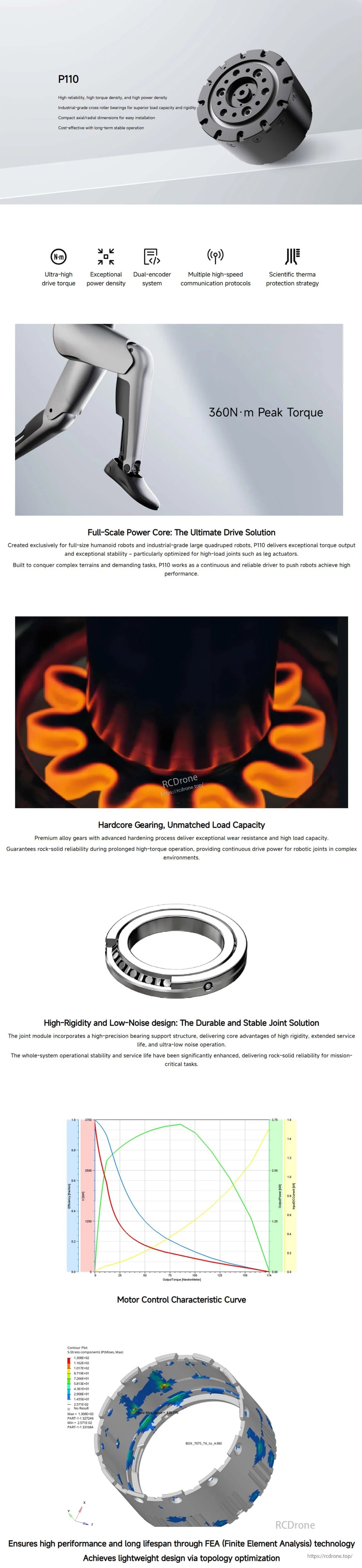
- 最大トルク 360 N·m
- 超高ドライブトルクと卓越したパワー密度
- デュアルエンコーダーシステム(モーターエンコーダー解像度:15ビット)
- 通信インターフェース:CAN / EtherCAT(複数の高速通信プロトコル)
- 科学的熱保護戦略
- 負荷容量のためのハードコアギアリング(先進的な硬化プロセスを施したプレミアム合金ギア)
- 高剛性、低騒音設計と高精度ベアリング支持構造
- 高性能と長寿命のためのFEA(有限要素解析)技術;強度を維持しながら軽量設計
用途
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
仕様
| 最大速度 | 20 rpm (24V電源) |
| モジュール重量 | 1900g |
| 定格トルク | 90 N·m |
| ピークトルク | 360 N·m |
| 寸法 | Φ112*71.5 |
| 動作電圧 | 48V - 54V |
| ピーク電流 | 137 A |
| 通信インターフェース | CAN / EtherCAT |
| エンコーダー設定 | デュアルエンコーダー |
| モーターエンコーダー解像度 | 15 ビット |
| 制御周波数 | 25,000 Hz |
| 推奨動作環境 | -5°C ~ 40°C |
統合、インターフェース、または設定に関する質問は、[email protected] orに連絡するか、 https://rcdrone.top/.
詳細
高負荷のヒューマノイドおよび四足歩行関節のために設計されたMagicLab P110は、360 N·mのピークトルクをデュアルエンコーダーフィードバックとCAN/EtherCAT通信と組み合わせ、正確で応答性の高いアクチュエーションを実現します。
Related Collections




