Matek AP Periph CANノード CAN-G474 DroneCANアダプターボード、STM32G474CE 512KB、CANFD 5Mbit/s
Matek AP Periph CANノード CAN-G474 DroneCANアダプターボード、STM32G474CE 512KB、CANFD 5Mbit/s
MATEKSYS
通常価格
$39.00 USD
通常価格
セール価格
$39.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
このAP Periph CANノード、Matek AP Periph CANノード CAN-G474は、5Mbit/s CANトランシーバーとSTM32G474 MCUを使用して、DroneCANバスに周辺機器を追加するために設計されたArduPilot AP_Periphアダプターノードです。これにより、ArduPilotがサポートするセンサーやGPIOベースの周辺機器(PWM出力やLED通知モジュールなど)をDroneCANを通じて統合することが可能になります。
主な特徴
- ArduPilot AP_Periphファームウェアに基づくアダプターノード
- 512KBフラッシュを搭載したSTM32G474CE MCU
- 1Mbitから5MbitのCAN/CANFDサポートを持つCANFD対応ハードウェア
- 2x CANバス
- GNSS、レンジファインダー、近接、EFI、RC入力(受信機)用の4x UART; GNSS、コンパス、気圧計用にTX3でデフォルトでMSPが有効
- I2C周辺機器用の2x I2Cバス(エアスピードセンサー、気圧計、コンパス)
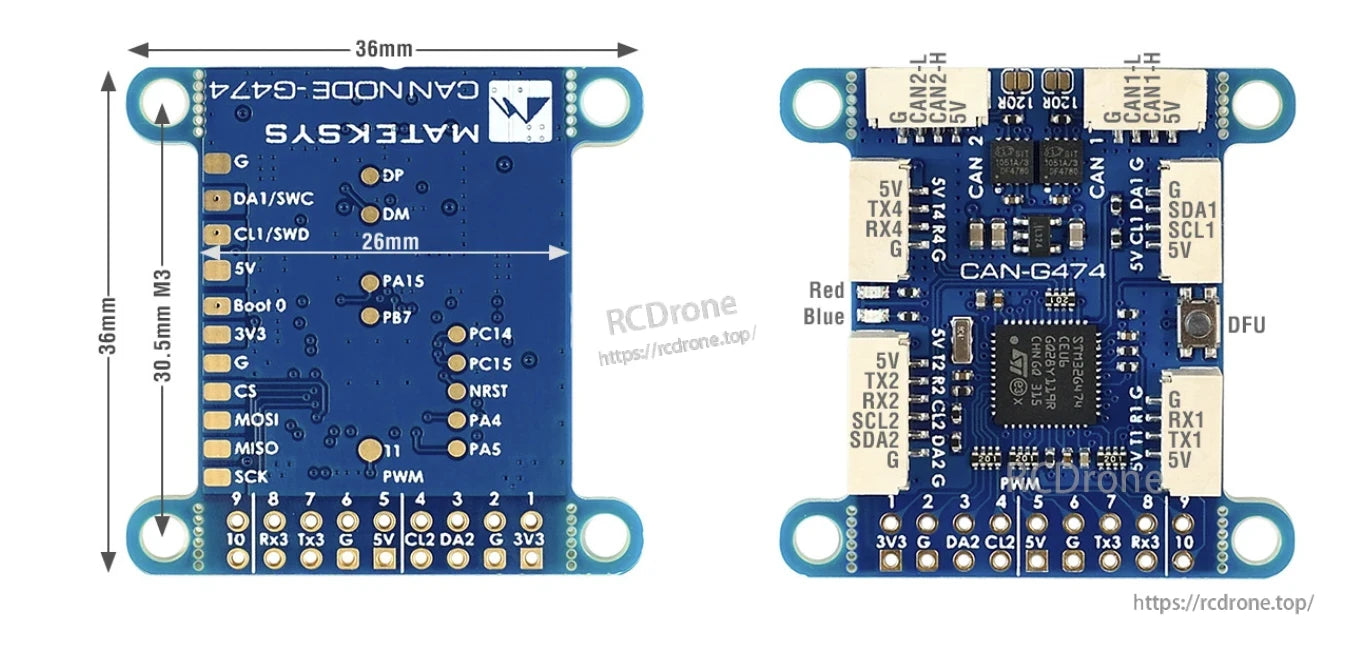
- RM3100用の1x SPI(底面に「CS、MOSI、MISO、SCK」のシルク印刷付きSPIパッド)
- サーボとESC用の11x PWM出力; すべてのPWMはDMA/DShotをサポート(PWM1-10はDuPont 2に接続)54mmの穴; 下側に「11」のシルク印刷が施されたPWM11パッド
- DroneCAN GUIツール / ミッションプランナー(DroneCANタブ)およびSTM32CubeProgrammer DFUモード(UART1)を介したファームウェア更新サポート
仕様
| MCU | STM32G474CE |
| フラッシュ | 512KB |
| CANトランシーバーデータレート | 最大5Mbit/s |
| CAN / CANFDサポート | 1Mbit ~ 5Mbit CAN/CANFD |
| CANバス | 2x |
| UART | 4x(デフォルトでTX3でMSPが有効) |
| I2C | 2x |
| SPI | 1x(RM3100用) |
| PWM出力 | 11x(PWM1-10はDuPont 2にあります)54mmの穴; PWM11パッドは底面にあります) |
| デバッグ | STデバッグ、SWC & SWD(底面に) |
| ファームウェア更新(DFU) | UART1(TX1、RX1) |
| LEDインジケーター | 青の早い点滅: ブート中; 青の遅い点滅: フライトコントローラーと通信中; 赤: 3.3Vインジケーター |
| 入力電圧範囲 | 4.5~5.5V @5Vパッド/ピン& |
| 消費電力 | 62mA |
| 動作温度 | -30~85 °C |
| コネクタ | 5x JST-GH-4P (SM04B-GHS-TB) for CAN1, CAN2, I2C1, UART1, UART4; 1x JST-GH-6P (SM06B-GHS-TB) for UART3+I2C2 |
| スルーホール | 18x DuPont 2.54mmの穴 |
| ボードサイズ | 36mm*36mm*6mm |
| 重量 | 5.2g |
| 取り付け | 30.5mm 4x直径3mm |
内容物
- 1x CAN-G474 ボード
- 2x JST-GH-4P to JST-GH-4P 20cm シリコンワイヤー
- 1x JST-GH-6P to JST-GH-6P 20cm シリコンワイヤー
カスタマーサービス: https://rcdrone.top/ または [email protected]
アプリケーション
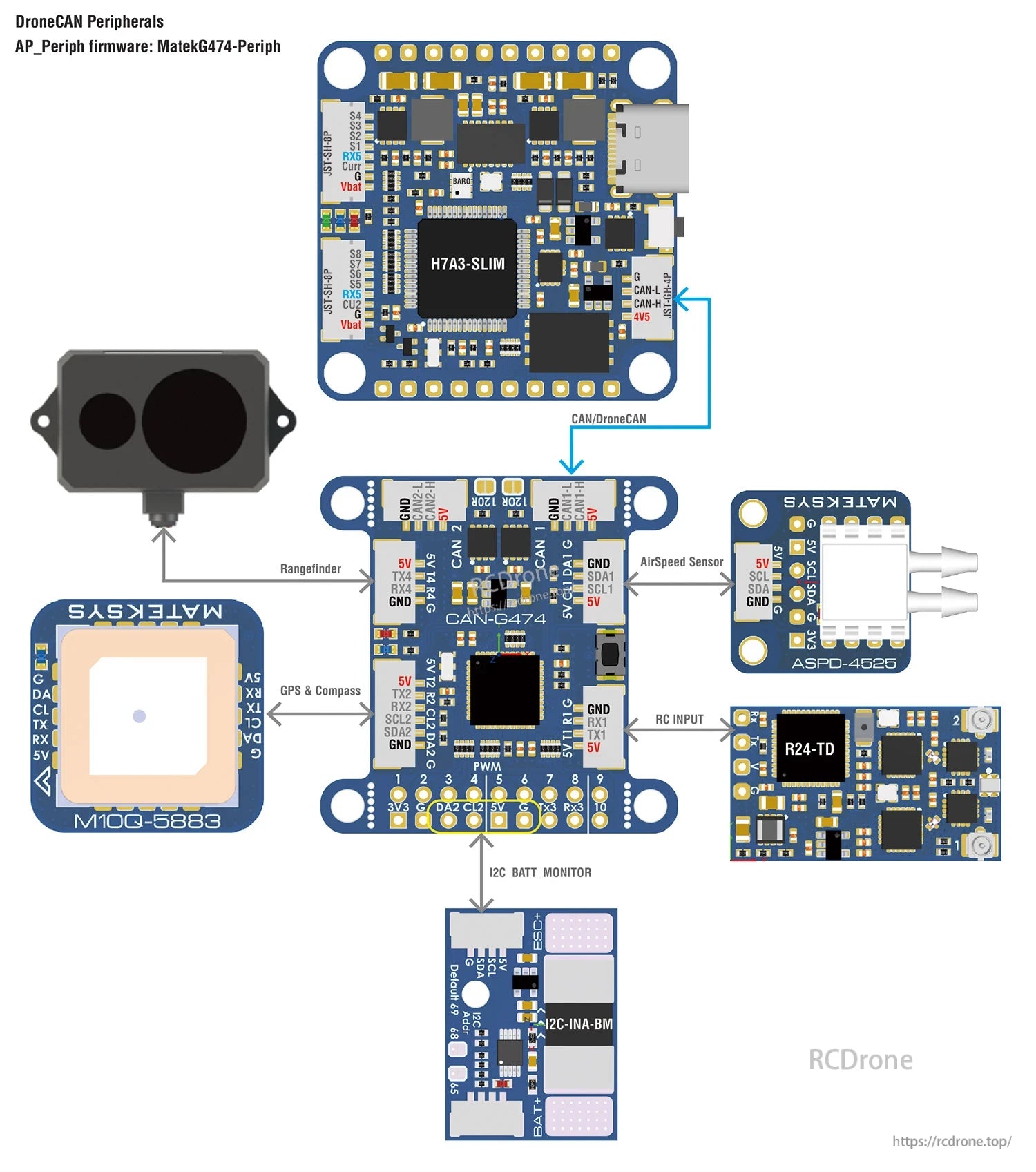
- ArduPilot対応の周辺機器をDroneCANバス周辺機器に変換(GNSS、コンパス、気圧計、空気速度センサー、距離計、近接センサー、電子燃料噴射装置)
- DroneCAN上のGPIOベースの周辺機器、PWMおよびLED通知モジュールを含む
- 接続例: 距離計、GPS & コンパス、空気速度センサー、RC入力、I2Cバッテリーモニター
- 冗長性オプション: フライトコントローラーに1つのCANバスを接続するか、両方を接続する
マニュアル
- ファームウェアダウンロード(ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Periph(周辺センサー用)
- MatekG474-DShot(DroneCAN-PWM出力用)
- 更新方法
- DroneCAN GUIツールまたはMission Planner – DroneCANタブで「AP_Periph.bin」を読み込む
- STM32CubeProgrammer DFUモード:USB-TTLモジュールをUART1に接続し、DFUボタンを押しながらUSBを接続し、「AP_Periph_with_bl.hex」を読み込む
- 3Dファイル:CAN-G474_STEP.zip
- チュートリアル:PWMおよびDShot用のMatekL431アダプタの使用
詳細
Matek CAN-G474ボードは、一般的な自動操縦周辺機器を接続するためのUART、I2C、およびPWMパッドに加えて、DroneCAN/CANポートを提供します。Matek CAN-G474ボードは、CAN/DroneCANバスに接続し、サーボやESC用の最大10のPWM出力を分岐します。
Related Collections