MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN デジタル パワー モニター
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN デジタル パワー モニター
MATEKSYS
受取状況を読み込めませんでした
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN デジタル パワー モニターの仕様
使用: 乗り物とリモコンのおもちゃ
推奨年齢: 12+y,14+y
原産地: 中国本土
材質: 複合材料
ブランド名: MATEKSYS
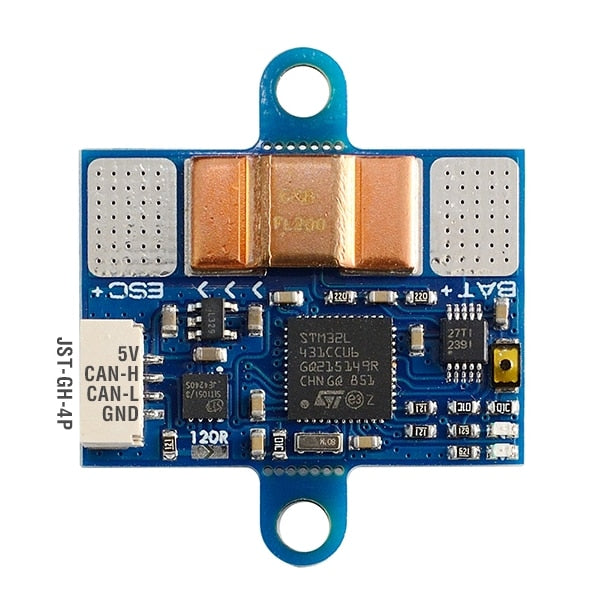
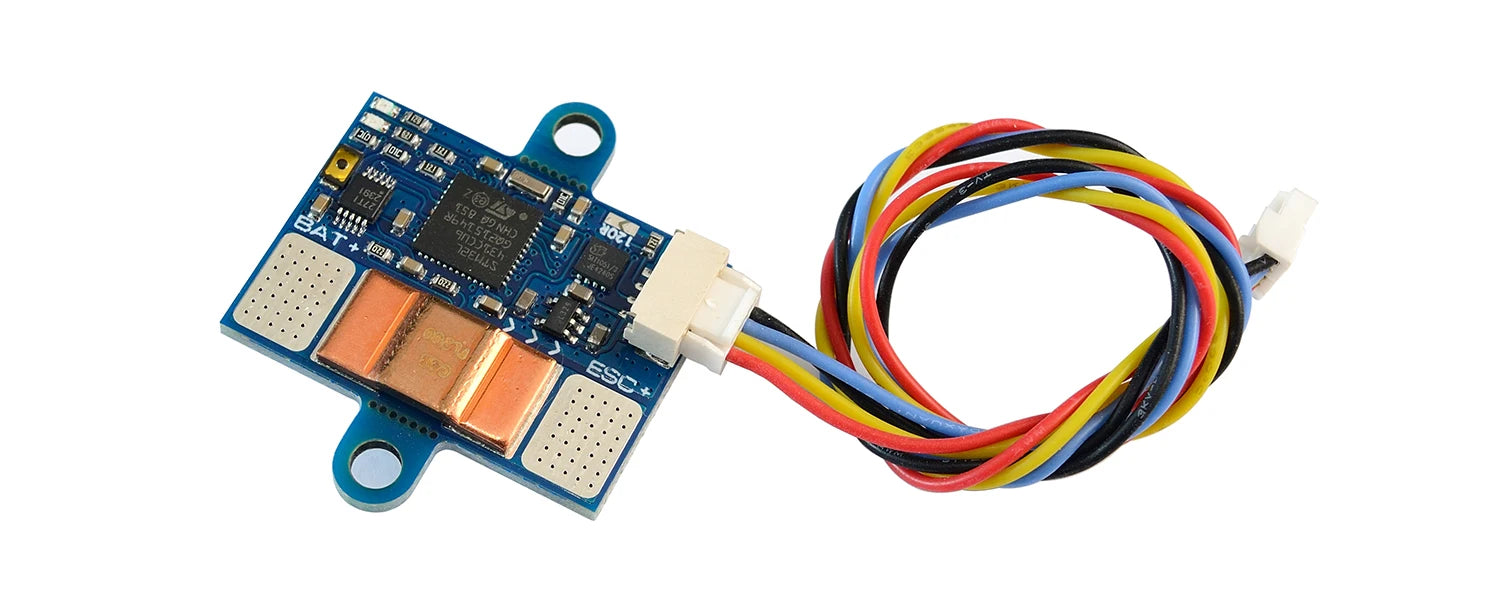
AP_PERIPH CAN デジタル パワー モニター、CAN-L4-BM
電流 0 ~ 204.8A、電圧 0 ~ 85V、CAN/DroneCAN プロトコル
-
CAN-L4-BM は、TI INA239 および ArudPilot AP_Periph ファームウェアに基づく超高精度デジタル パワー モニターです。
-
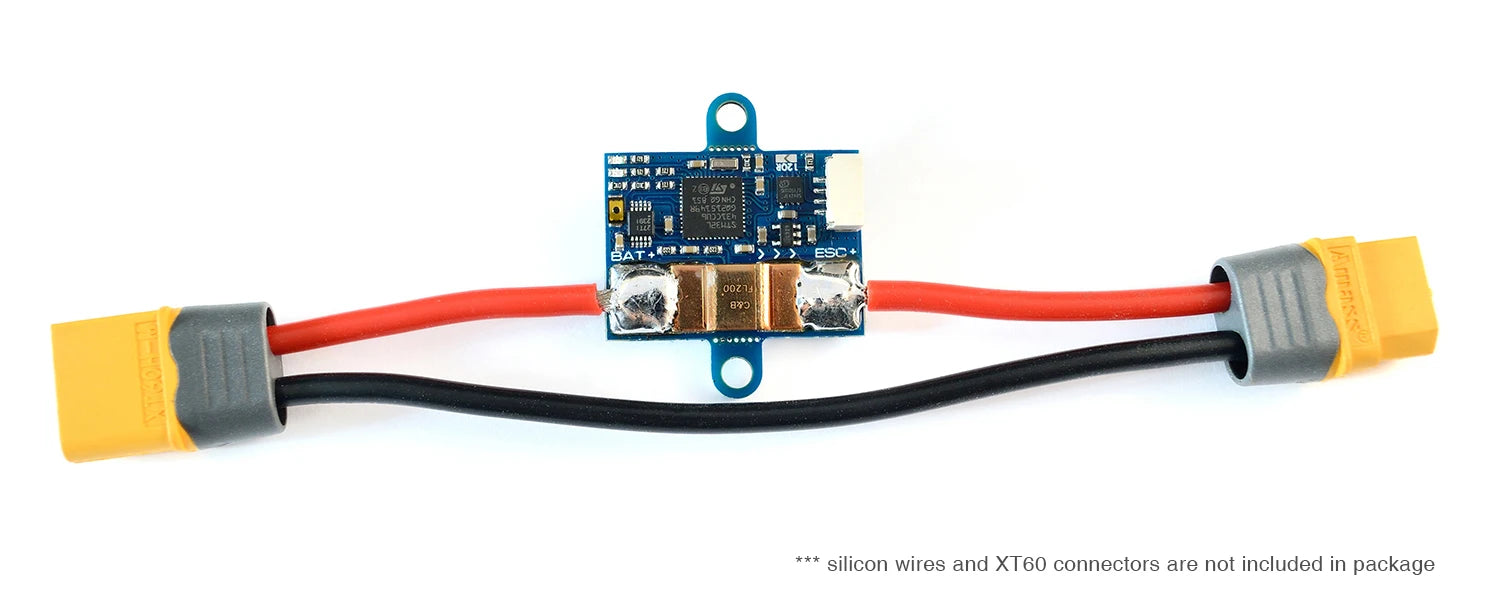
この導電パスの抵抗は標準 200 μΩ で、アプリケーションでの電力損失が低くなります。
-
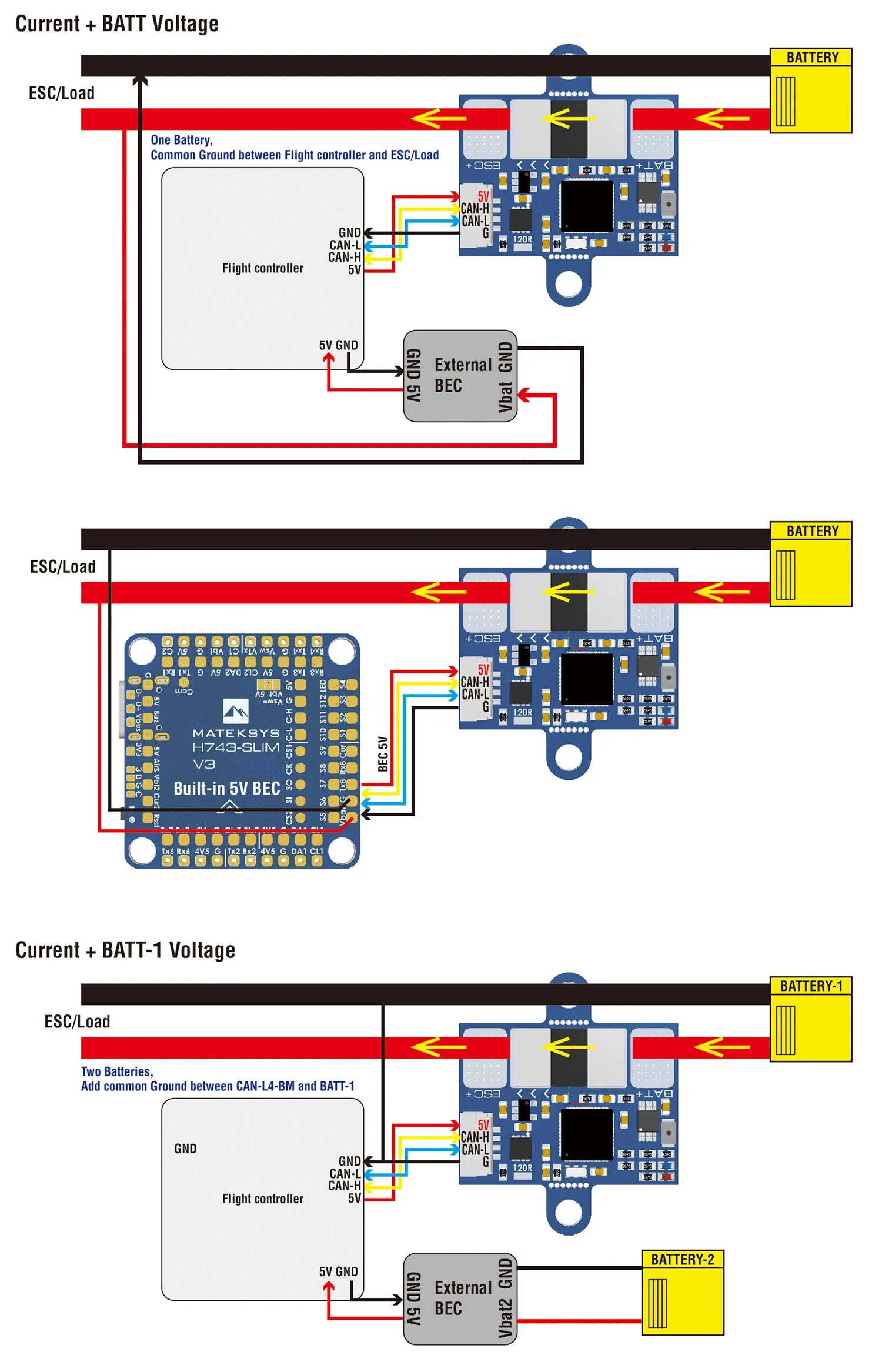
このデバイスを使用すると、キャリブレーションは必要ありません。DroneCAN プロトコルをサポートするフライト コントローラーは、CAN バス経由で正確な電流とバス電圧の読み取り値を簡単に取得できます。
仕様
-
MCU: STM32L431xC、256KB フラッシュ
-
INA239 85V、16 ビット、SPI インターフェイス付き高精度パワー モニタ IC
-
バッテリ電圧検出入力: 0 ~ 85V
-
電流検出範囲: 0~204.8A
-
電流検出抵抗の負荷電流: 150A(連続)、204.8A(バースト)
-
電圧精度: ± 0.1%
-
電流精度: ± 2%
-
インターフェース
-
CAN、DroneCAN プロトコル
-
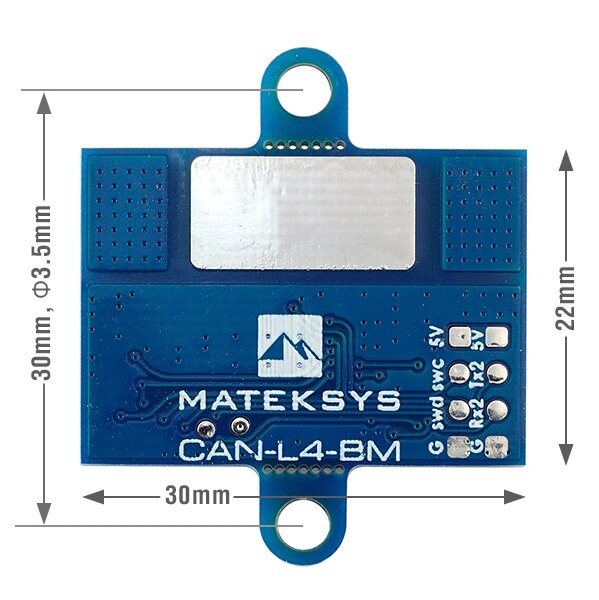
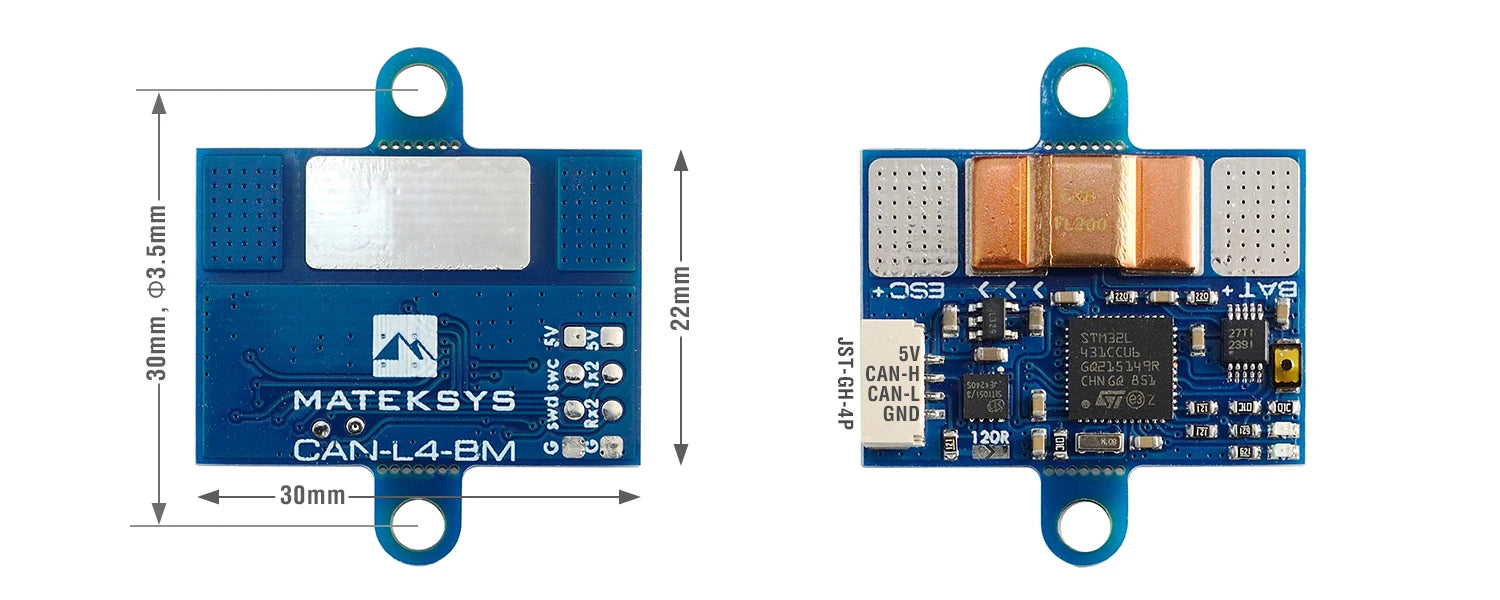
UART2、スペア、DFU
-
ST デバッグ、SWCLK および SWDIO
-
-
LED
-
青、高速点滅、起動中
-
青、ゆっくり点滅、動作中
-
赤色、3.3V インジケータ
-
CAN-L4-BM ボードの電源 : 4.5 ~ 5.5V @5V パッド/ピン
-
消費電力:10mA
-
動作温度: -40~85 °C
-
物理的
-
基板サイズ: 30mm*22mm*3mm。 4g
-
3D ファイル : CAN-L4-BM_STEP.zip
-
-
ファームウェア
-
ArduPilot AP_Periph MatekL431-BattMon
-
DroneCAN GUI ツール経由で更新
-
-
パラメータ
-
CAN バス 1 ポートに接続されている場合は CAN_P1_DRIVER = 1、CAN バス 2 ポートに接続されている場合は CAN_P2_DRIVER = 1
-
BATTx_MONITOR = 8 (DroneCAN-バッテリー情報)
-
梱包
-
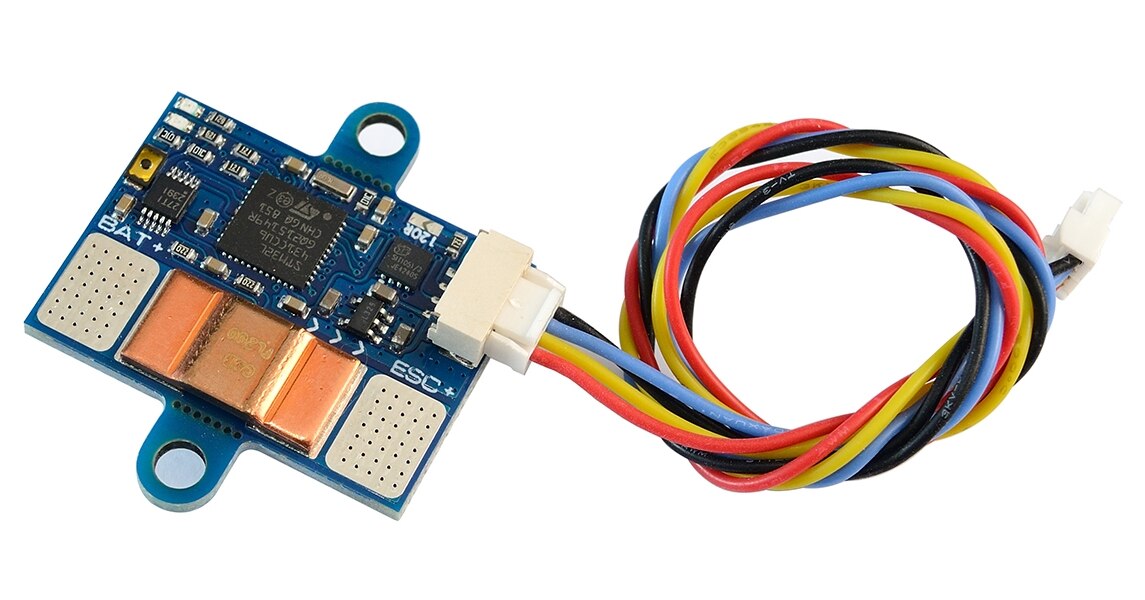
1x CAN-L4-BM ボード
-
1x JST-GH-4P to JST-GH-4P 20cm シリコン ワイヤ
ヒント
-
下側の大きなパッドはデッドパッドです。回線ネットワークがありません。
-
電流検出抵抗器の両側にできるだけ近くにプラス線をはんだ付けします。
-
取り付け用の2つの耳が必要ない場合は切り取ることができます。
-
CAN ワイヤが長すぎる場合は、「120R」ジャンパをブリッジします。
Related Collections