MATEK M10-L4-3100 GPS モジュール - Mateksys AP_PERIPH GNSS ユーブロックス MAX-M10S RM3100
MATEK M10-L4-3100 GPS モジュール - Mateksys AP_PERIPH GNSS ユーブロックス MAX-M10S RM3100
MATEKSYS
受取状況を読み込めませんでした
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS 仕様
使用: 乗り物とリモコンのおもちゃ
推奨年齢: 12+y,14+y,6-12y
原産地: 中国本土
材質: 複合材料
ブランド名: MATEKSYS
AP_PERIPH GNSS M10-L4-3100
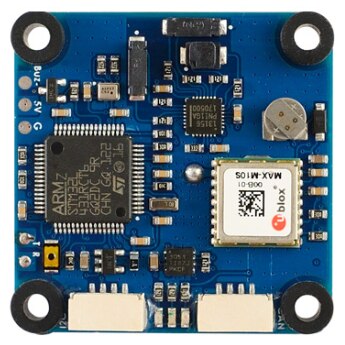
AP_Periph L431 CAN ノード、MAX-M10S、RM3100、SPL06-001、DroneCAN プロトコルおよび UART_MSP
-
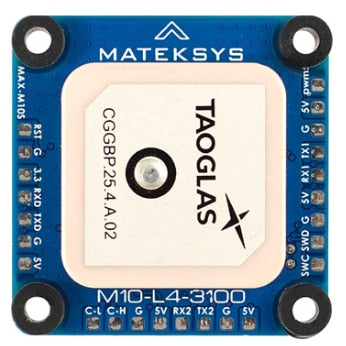
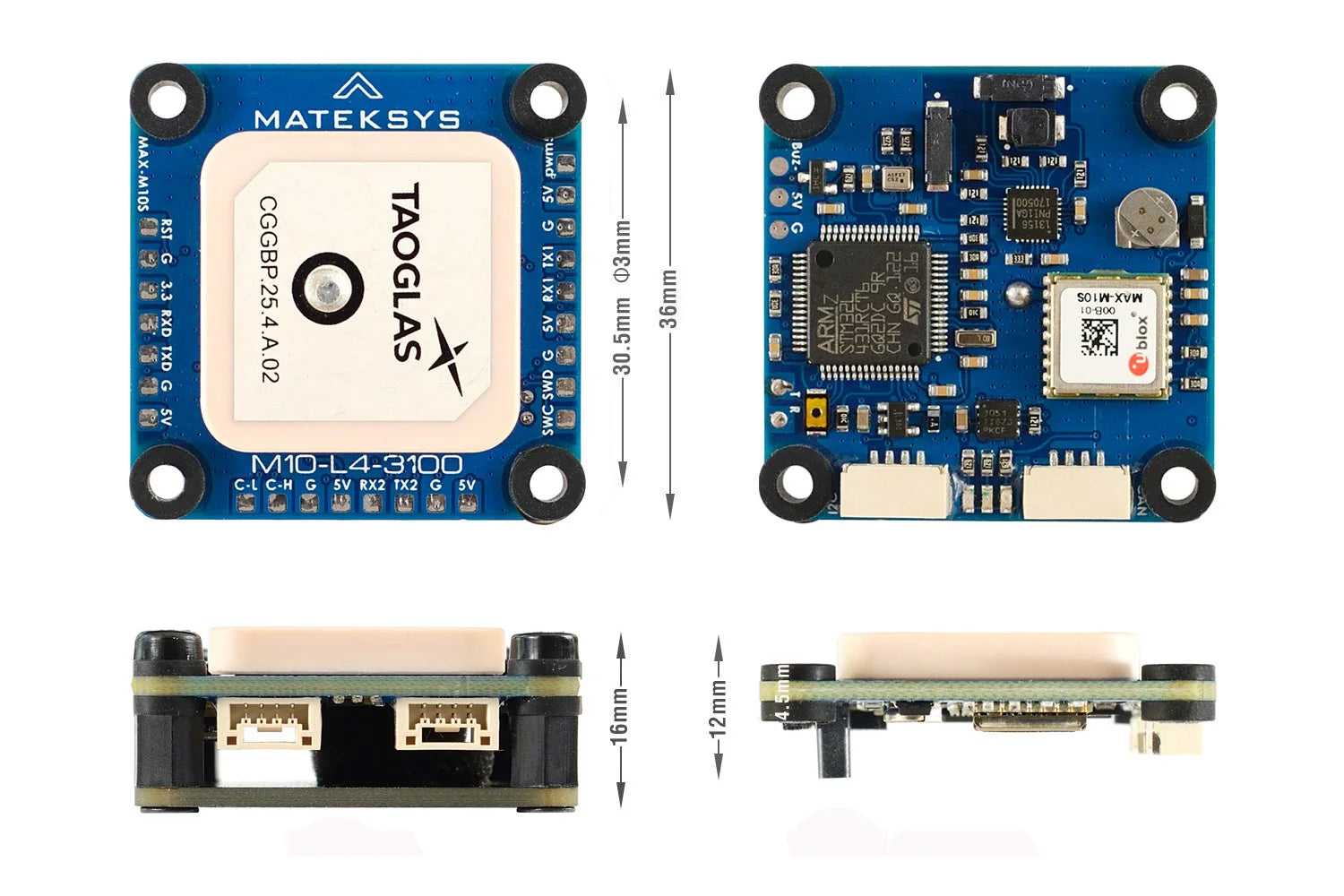
M10-L4-3100 は ArudPilots の AP_Periph ファームウェアに基づいており、CAN/DroneCAN および UART/MSP インターフェイスを備えた GNSS+COMPASS+BAROMETER ペリフェラルです。
-
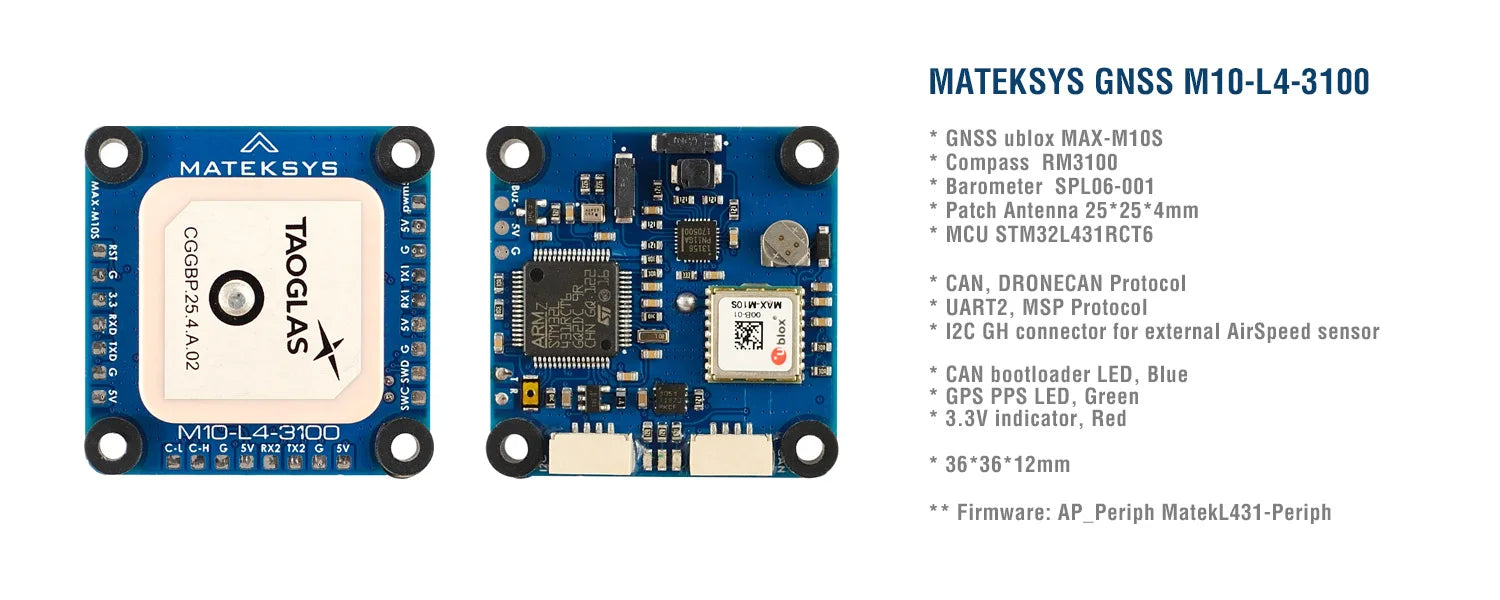
M10-L4-3100 は、u-blox MAX-M10S を搭載したマルチコンステレーション GNSS を使用します。MAX-M10S は、複数の GNSS システムを受信して追跡できる同時 GNSS 受信機です。マルチバンド RF フロントエンド アーキテクチャにより、GPS、Galileo、GLONASS、BeiDou の 4 つの主要な GNSS コンステレーションをすべて同時に受信できます。
-
M10-L4-3100 は、高分解能、低消費電力、ヒステリシスなし、広いダイナミック レンジ、および高いサンプリング レートを提供する産業グレードのコンパス PNI RM3100 を統合しています。
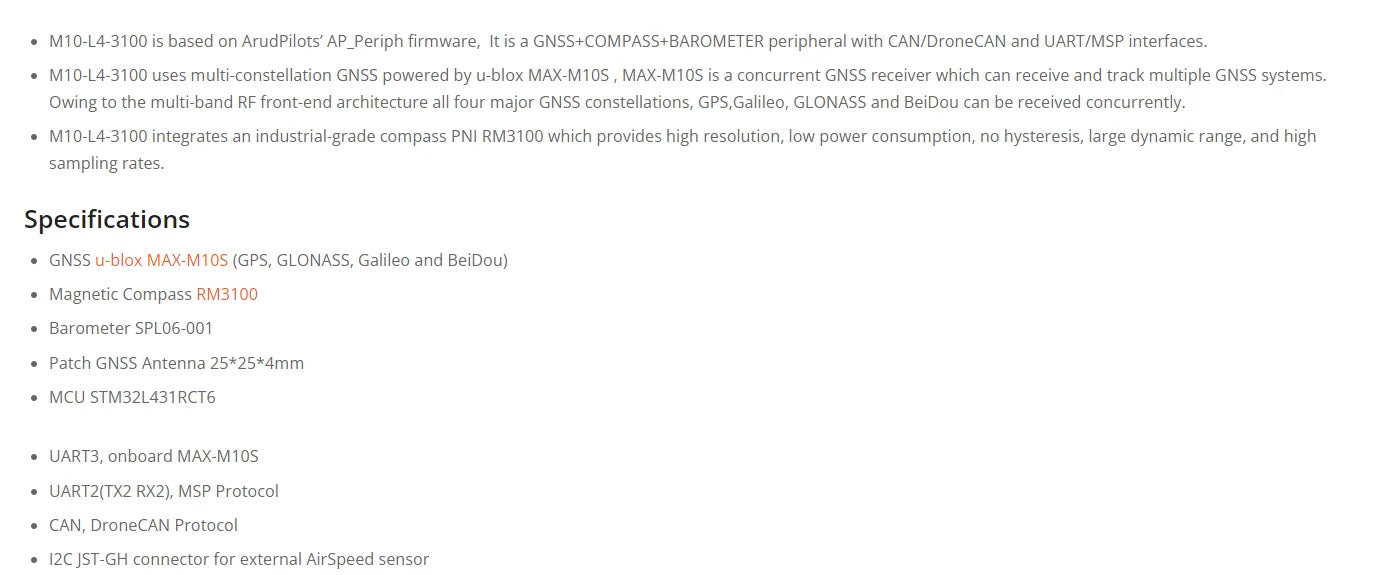

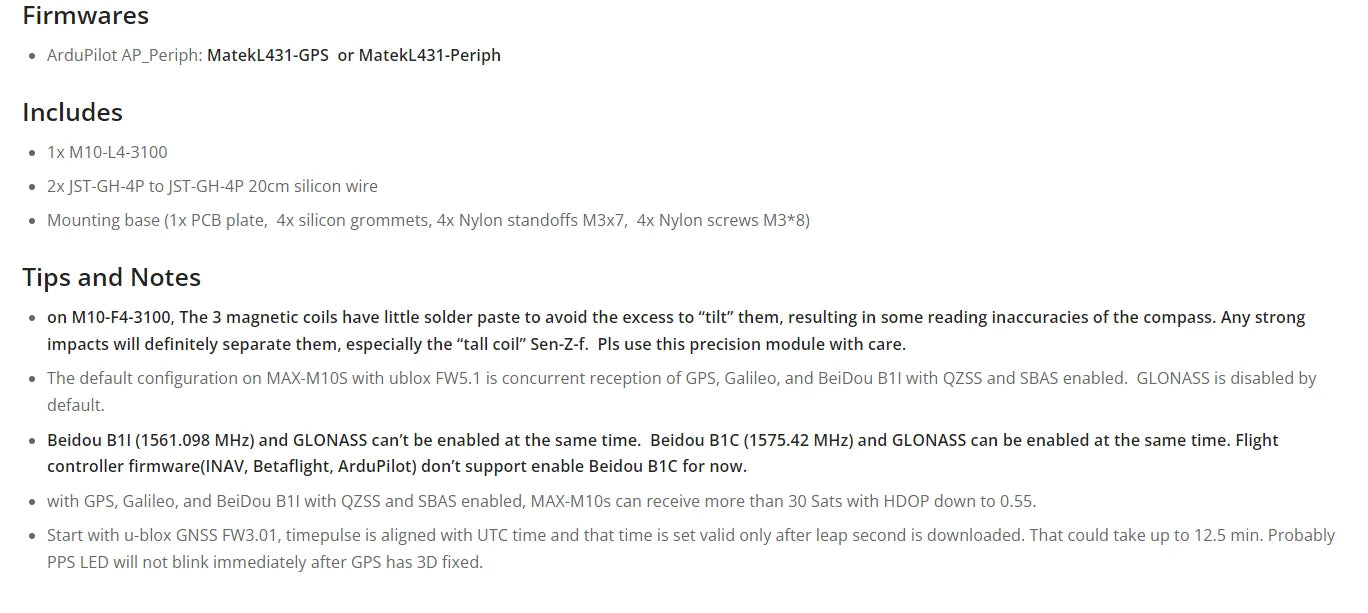
ublox FWS を使用した MAX-M1OS のデフォルト構成。 QZSS と SBAS を有効にした場合の GPS、Galileo、および BeiDou BI の同時受信です。 GLONASS はデフォルトでは無効になっており、Beidou B1I (1575.42 MHz) を同時に有効にすることはできません。
CAN (UAVCAN プロトコル) 接続
-
M10-L4-3100 5V — FC 4.5V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN High
-
M10-L4-3100 CAN-L — FC CAN 低
-
M10-L4-3100 G — FC G/GND
FC UAVCAN パラメータ(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (DroneCAN がチェックされていないことを確認してください)
————————————————————————–
I2C 対気速度センサーを M10-L4-3100 の I2C ポートに接続する場合
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
また、M10-L4-3100 の I2C ポートに接続された対気速度センサーの CAN ノード パラメータを設定する必要があります
ミッション プランナー > 初期セットアップ > オプションのハードウェア > UAVCAN > SLCan モード CAN1 > パラメータ
-
MS4525 ARSP_TYPE -> 1 (hwdef のデフォルト)
-
MS5525 ARSP_TYPE -> 3 アドレス 0x77 の MS5525 のみをサポートします
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
書き込みと再起動
————————————————————————–
2812LED DIN を PWM5 パッドに接続する場合
-
NTF_LED_TYPES -> (DroneCAN がオンになっていることを確認してください)
SLCan モード CAN1 > パラメータ
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw は「MatekL431-Periph」である必要があります。「MatekL431-GPS」では MSP 機能が無効になっています
UART (MSP プロトコル) 接続
-
M10-L4-3100 5V — FC 4.0V ~ 5.3V
-
M10-L4-3100 TX2 — FC スペア UART_RX
-
M10-L4-3100 RX2 - FC スペア UART_TX (必須ではありません)
-
M10-L4-3100 G — FC G/GND
ArduPilot (4.1.x 以降) FC パラメータ
-
Serialx_PROTOCOL = 32 (MSP) ここで、x は自動操縦での接続に使用されるシリアル ポートです。
-
Serialx_BAUD = 115 ここで、x は自動操縦での接続に使用されるシリアル ポートです。
-
GPS タイプ = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP バロ)
-
BARO_PRIMARY = 1 (MSP baro をプライマリ baro として使用する場合、それ以外の場合はデフォルトのままにします)
-
COMPASS_TYPEMASK 0 (またはMSPビットがチェックされていないことを確認してください)
INAV (2.6 以降) FC パラメータ
-
M10-L4-3100 は、スペア UART 経由で INAV によってサポートされるフライト コントローラーと互換性があります。
-
ポート タブで、M10-L4-3100 が接続した対応する UART で MSP を有効にします。その UART で「GPS」を有効にしないでください。 ボーレート 115200 を選択します。
-
GPS 機能
-
gps_provider = MSP を設定
-
mag_hardware = MSP を設定
-
baro_hardware = MSP を設定
-
set align_mag = CW90。コンパスが矢印が前を向くように平らに取り付けられており、フライト コントローラーの矢印も前を向いている場合。
Related Collections