MATEK F405-WTE - Mateksys フライト コントローラー
MATEK F405-WTE - Mateksys フライト コントローラー
MATEKSYS
受取状況を読み込めませんでした
MATEK F405-WTE - Mateksys フライト コントローラーの仕様
使用: 乗り物とリモコンのおもちゃ
推奨年齢: 12+y,14+y
原産地: 中国本土
材質: 複合材料
ブランド名: MATEKSYS
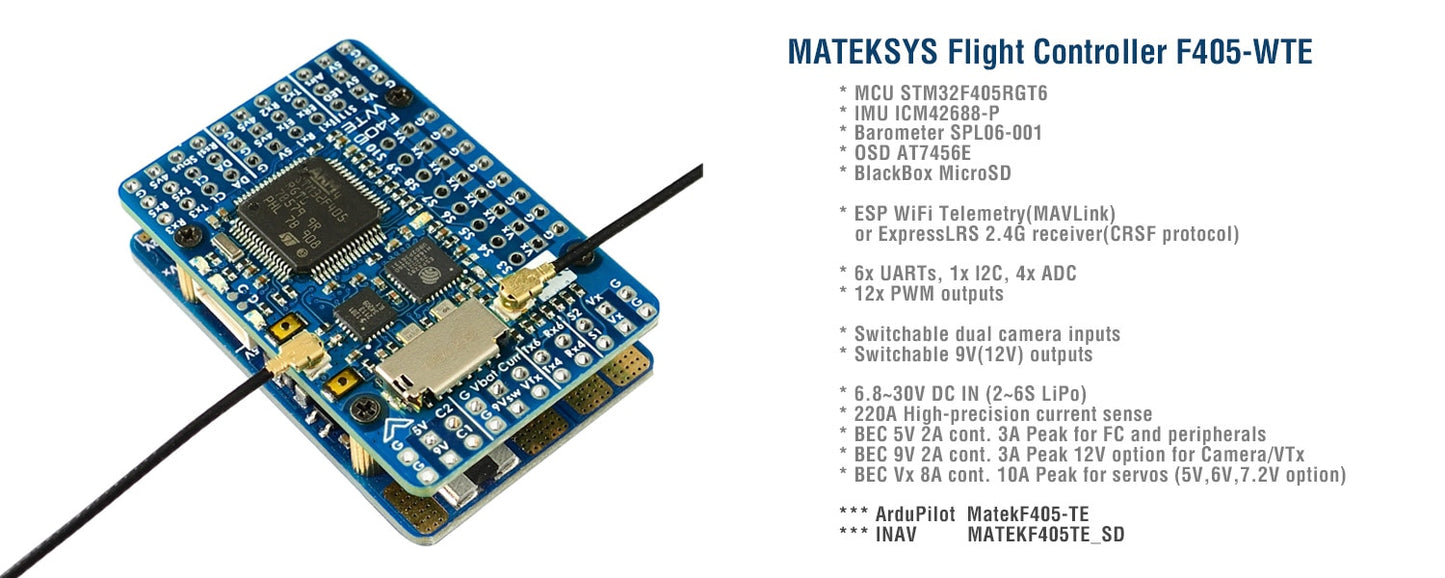
フライトコントローラー F405-WTE
STM32F405RGT6、ICM42688P、SPL06、OSD、ESP WIFI テレメトリ/ELRS 2.4G レシーバー、6xUART、12x PWM、1xI2C
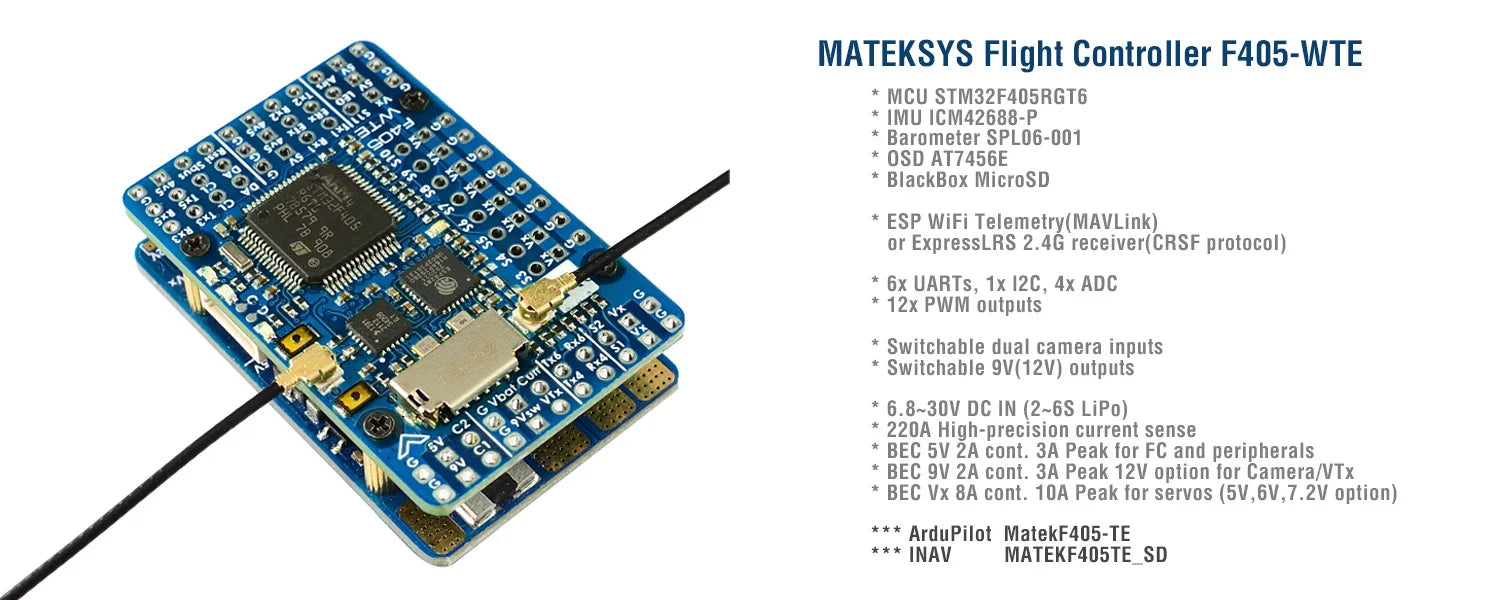
MATEKSYS フライト コントローラー F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P 気圧 SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi テレメトリー (MAVLink) 2 または ExpressLRS 2.4G レシーバー (CRSF プロトコル) 6x UART 、1x I2C 、 4x ADC 85 12x PWM 出力 切り替え可能なデュアル カメラ入力 4+

FC 仕様
-
MCU: STM32F405RGT6、168MHz、1MB フラッシュ
-
IMU: ICM42688-P
-
バロ: SPL06-001
-
OSD: AT7456E
-
ブラックボックス: MicroSD カード スロット
-
ESP WiFi テレメトリ(MAVLink、14dBm)
-
ExpressLRS 2.4G 受信機(CRSF プロトコル、テレメトリ 12dBm)
-
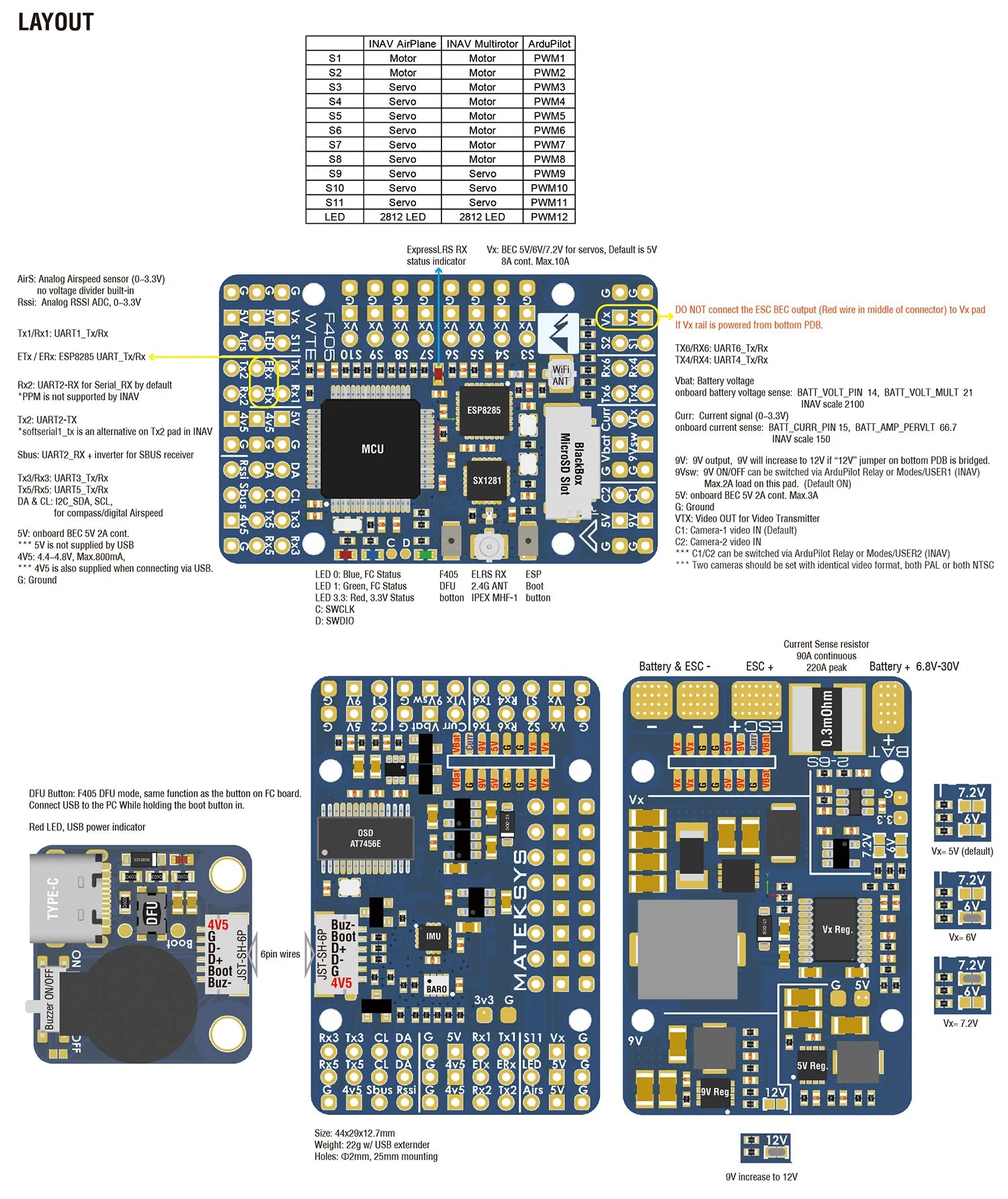
6x UART、1x Softserial_Tx オプション (INAV)
-
12x PWM 出力
-
1x I2C
-
4x ADC (VBAT、電流、RSSI、対気速度)
-
Type-C 対応 USB/ビープ エクステンダー(USB2.0)
-
デュアル カメラ入力スイッチ
-
VTX 電源スイッチ用 9V(12V)
FC ファームウェア
-
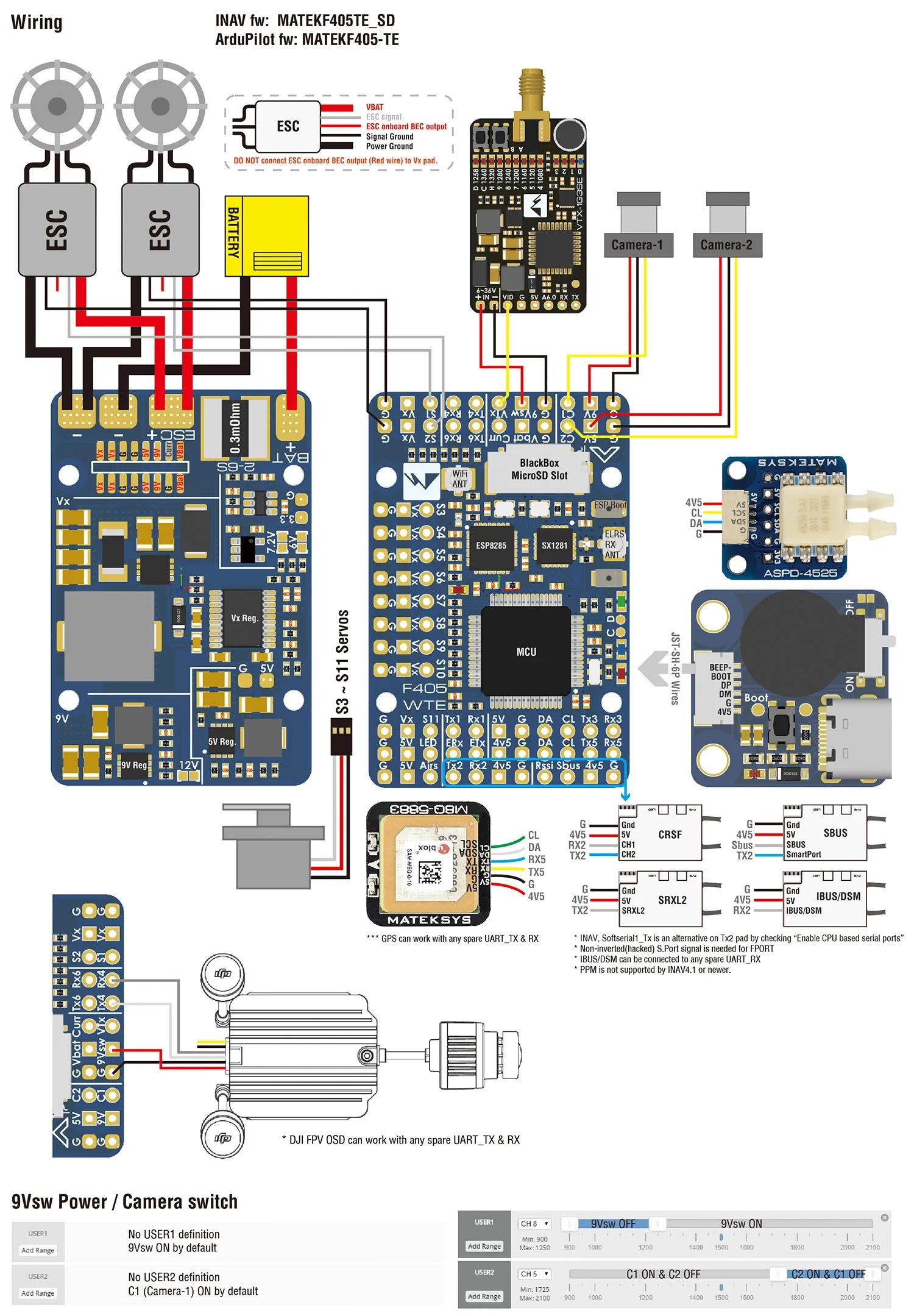
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD (INAV コンフィギュレーター 4.x では使用できません)
PDB
-
入力電圧範囲: 6.8 ~ 30V (2 ~ 6S LiPo)
-
ESC 電源パッド x 1
-
バッテリー分圧器 1K:20K (INAV ではスケール 2100、ArduPilot では BATT_VOLT_MULT 21.0)
-
電流センサー: 220A、3.3V ADC (INAV ではスケール 150、ArduPilot では 66.7 A/V)
-
センス抵抗: 連続 90A、ピーク 220A
BEC 5V 出力
-
フライト コントローラー、受信機、OSD、カメラ、ブザー、2812 LED_Strip、ブザー、GPS モジュール、AirSpeed 用に設計
-
連続電流: 2 アンペア、最大 3A
BEC 9V /12V 出力
-
ビデオトランスミッター、カメラ、ジンバルなど向けに設計
-
連続電流: 2 アンペア、最大 3A
-
ジャンパー パッド付き 12V オプション
-
安定した 9V/12V 出力の場合、入力電圧 > 出力電圧 +1V である必要があります
BEC Vx 出力
-
サーボ用に設計
-
電圧調整可能、デフォルトは 5V、ジャンパ経由で 6V または 7.2V
-
連続電流: 8 アンペア、最大 10A
-
安定した Vx 出力を得るには、入力電圧が Vx 電圧 +1V を超える必要があります
BEC 3.3V 出力
-
Baro / Compass モジュールおよび外部 3 用に設計されています。3V 周辺機器
-
リニアレギュレータ
-
連続電流: 200mA
物理的
-
取付寸法:25×25mm、Φ2mm
-
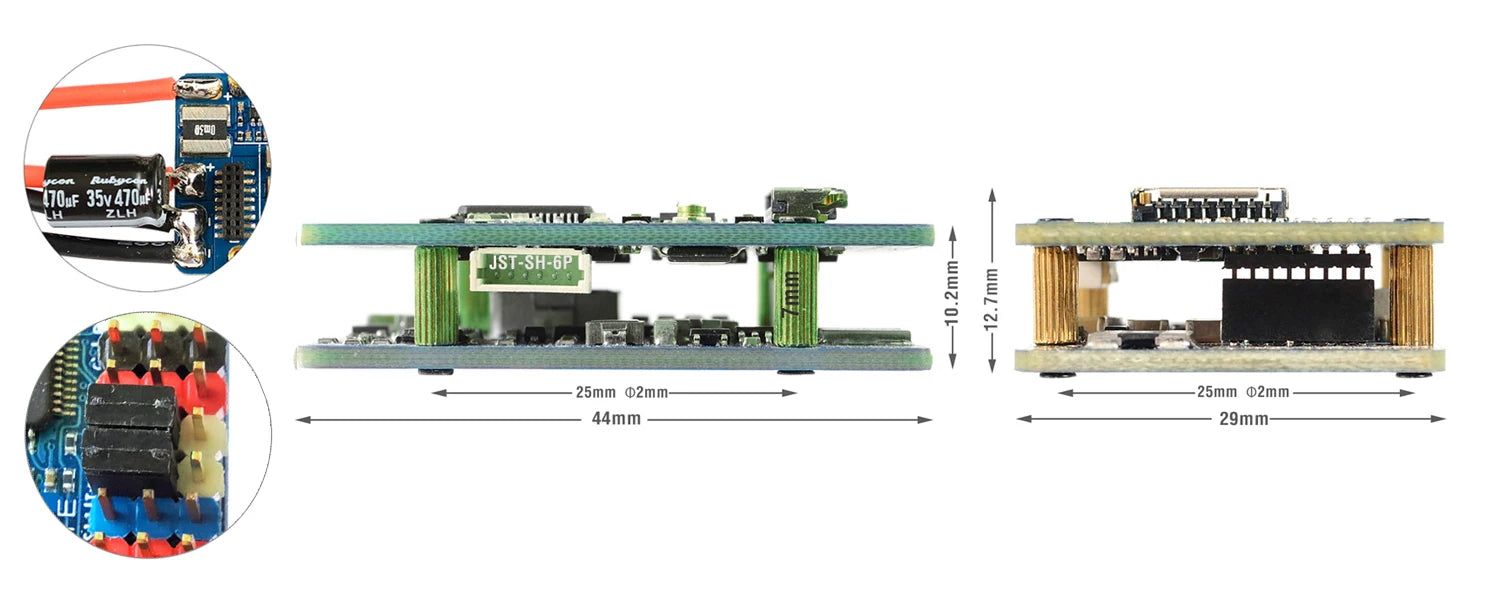
寸法: 44 x 29 x 12.7mm
-
重量: 22g(USB/ブザーアダプター含む)
を含む
-
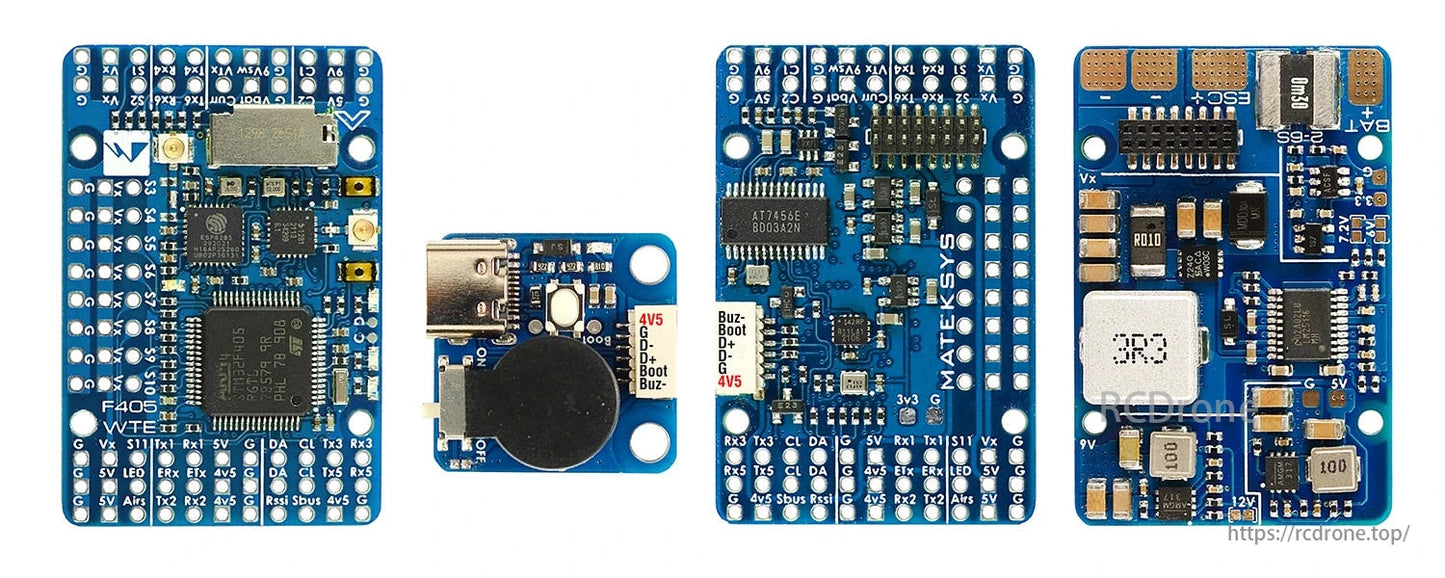
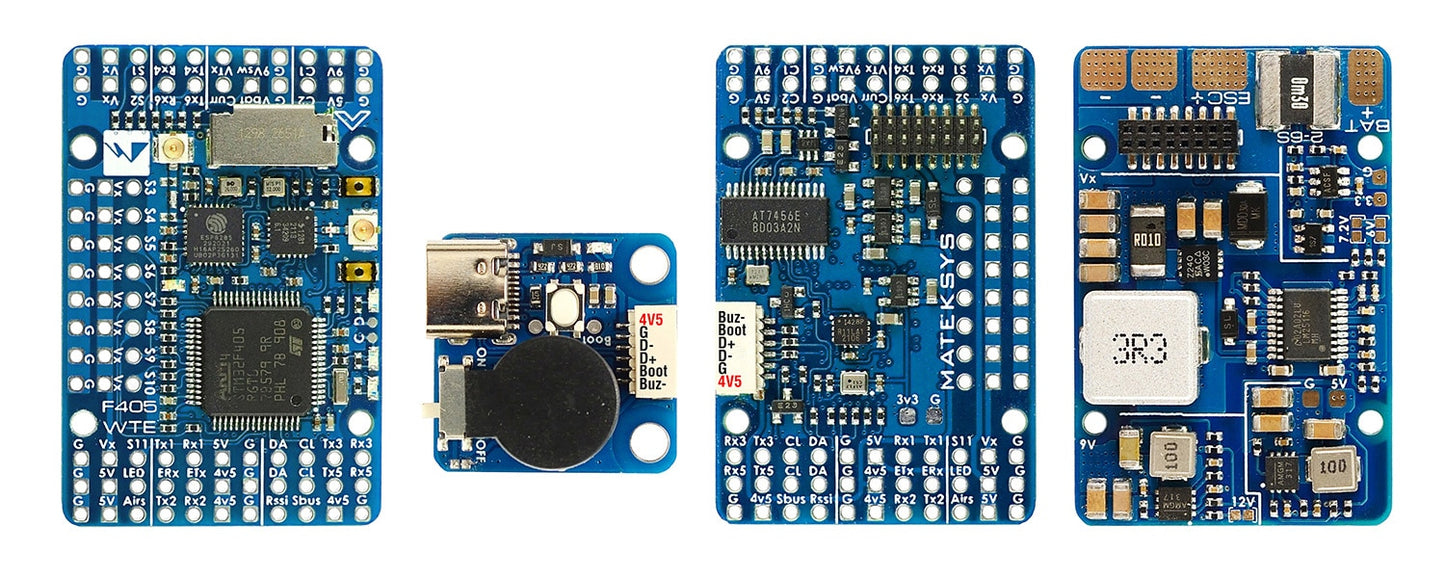
1x F405-WTE
-
USB(Type-C)/ビープ (パッシブ ブザー) エクステンダー x 1 + USB エクステンダー用の 20 cm JST-SH-6P to JST-SH-6P ケーブル。
-
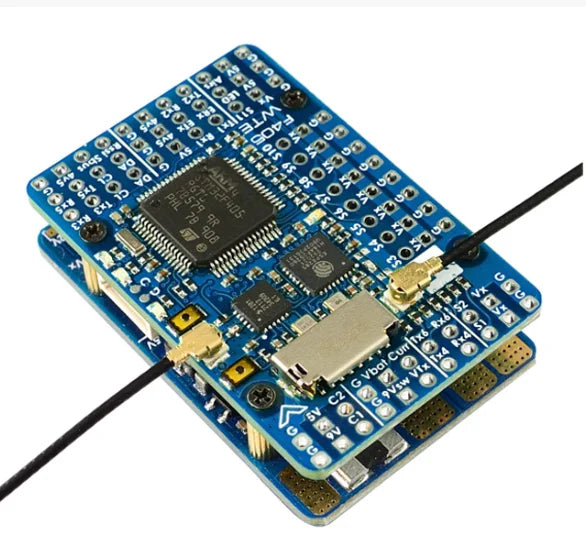
2x IPEX-MHF1 2.4G アンテナ
-
Rubycon ZLH 35V 470uF コンデンサ x 1
-
Dupont 2.54 ピン (ボードははんだ付けされていない状態で出荷されます)
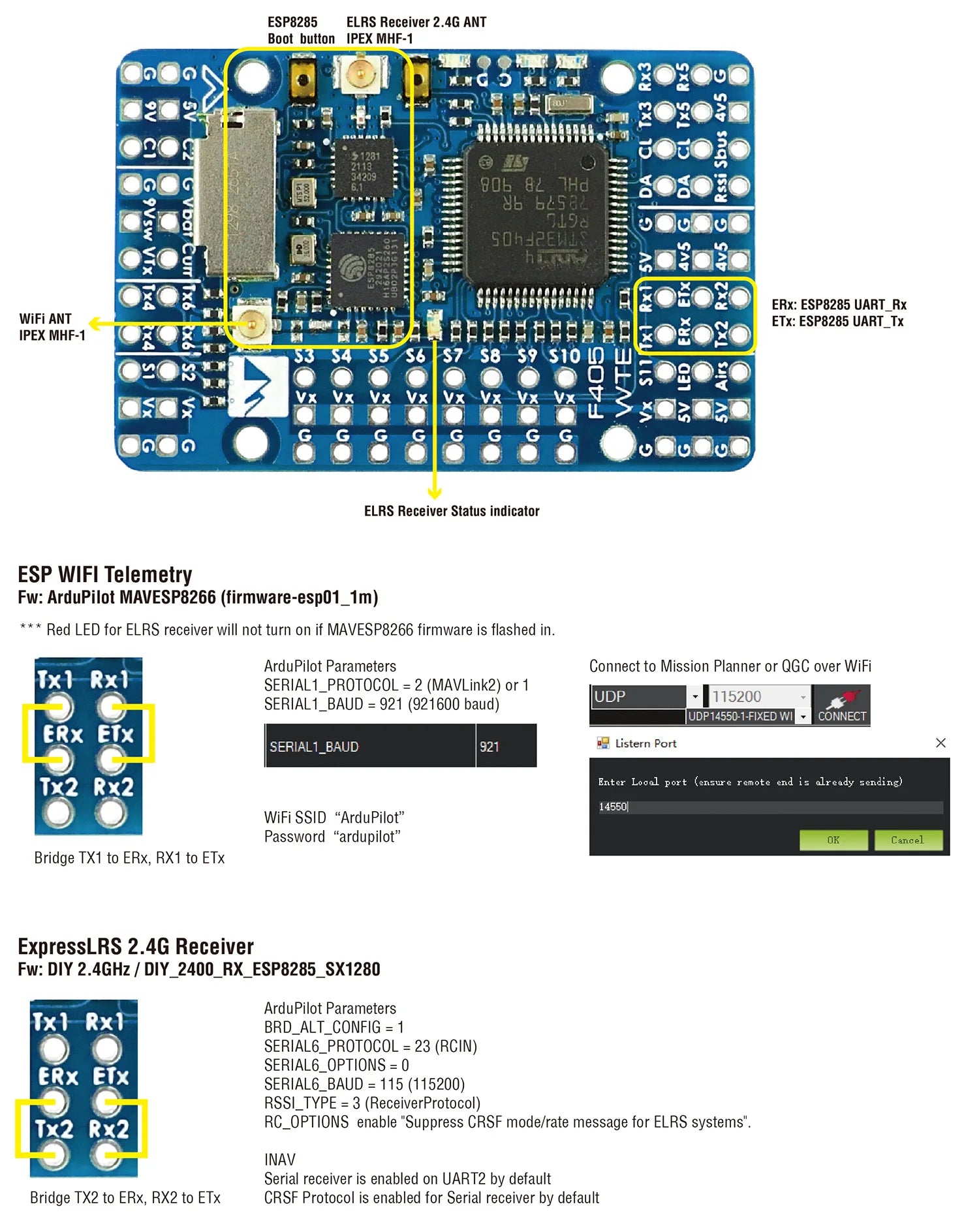
ArduPilot ESP8266 Wi-Fi テレメトリ
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
ファームウェア: firmware-esp01_1m.bin
-
ESP_NodeMCU-PyFlasher によるフラッシュ
-
ESP8285(ETx、ERx) を USB-TTL アダプターに配線します。F405-WTE の ETx を USB-TTL の Rx に接続し、ERx を USB-TTL の Tx に接続します。 F405-WTE の 4v5 と GND を USB-TTL
の 5V と GND に配線します。 -
ESP8285 ブート ボタンを押したままにして、USB-TTL アダプタを PC に接続します。
-
ESP_NodeMCU-PyFlasher を開く
- USB-TTL モジュールの シリアル ポート を選択し、ファームウェアをロードし、「デュアル出力 (DOUT)」と「はい。すべてのデータを消去します“
-
「フラッシュ ノード MCU「
」をクリックします -
点滅後、電源を切り、USB またはバッテリーで F405-WTE の電源を入れます。
-
数秒待って、WiFi SSID「ArduPilot」を検索し、パスワードは「ardupilot」です
-
ヒント: MAVESP8266 ファームウェアがフラッシュされている場合、ELRS レシーバーの赤色 LED は点灯しません。
-
ExpressLRS 2.4G レシーバー
-
ExpressLRS AUX1 ~ AUX8 はフル解像度 CH ではありません。https://www.expresslrs.org/2.0/software/switch-config/
-
WiFi 経由で点滅
-
USB で F405-WTE の電源をオンにすると、レシーバーの LED (赤) が最初はゆっくり点滅し、30 秒後に速く点滅して、WiFi ホットスポット モードになっていることを示します。
-
詳細な手順については、このページを参照してください。
-
ターゲット: DIY 2.4GHz / DIY_2400_RX_ESP8285_SX1280
-
-
UART 経由でフラッシュ
-
ESP8285(ETx、ERx) を USB-TTL アダプターに配線します。F405-WTE の ETx を USB-TTL の Rx に接続し、ERx を USB-TTL の Tx に接続します。 F405-WTE の 4v5 と GND を USB-TTL の 5V と GND に配線します。
-
ESP8285 ブート ボタンを押したままにして、USB-TTL アダプタを PC に接続します。
-
ターゲットを選択 DIY 2.4GHz /DIY_2400_RX_ESP8285_SX1280および「UART」の [フラッシュ方法] で、バインド フレーズとファームウェア オプションを設定し、完了したら、ビルドとフラッシュをクリックします。
-
WiFi 経由の INAV コンフィギュレータとの UDP 接続
-
ファームウェア: MSPWifiBridge_ESP-01.bin github.com/Scavanger/MSPWifiBridge
に基づいてコンパイルされました -
ESP_NodeMCU-PyFlasher によるフラッシュ
-
ESP8285(ETx、ERx) を USB-TTL アダプターに配線します。F405-WTE の ETx を USB-TTL の Rx に接続し、ERx を USB-TTL の Tx に接続します。 F405-WTE の 4v5 と GND を USB-TTL
の 5V と GND に配線します。 -
ESP8285 ブート ボタンを押したままにして、USB-TTL アダプタを PC に接続します。
-
ESP_NodeMCU-PyFlasher を開く
-
USB-TTL モジュールの
シリアル ポート を選択し、ファームウェアをロードし、「デュアル出力 (DOUT)」と「はい。すべてのデータを消去します“
-
「フラッシュ ノード MCU「
」をクリックします -
点滅後、電源をオフにし、USB またはバッテリーで F405-WTE の電源をオンにします。
-
数秒待って、WiFi SSID「MSPWifiBridge」を検索し、パスワードは「123456789」
-
設定ページへの自動転送がない場合は、http://192.168.4.1 に手動で移動します。標準ログインデータ: ユーザー名:admin、パスワード:123456789
2535>
-
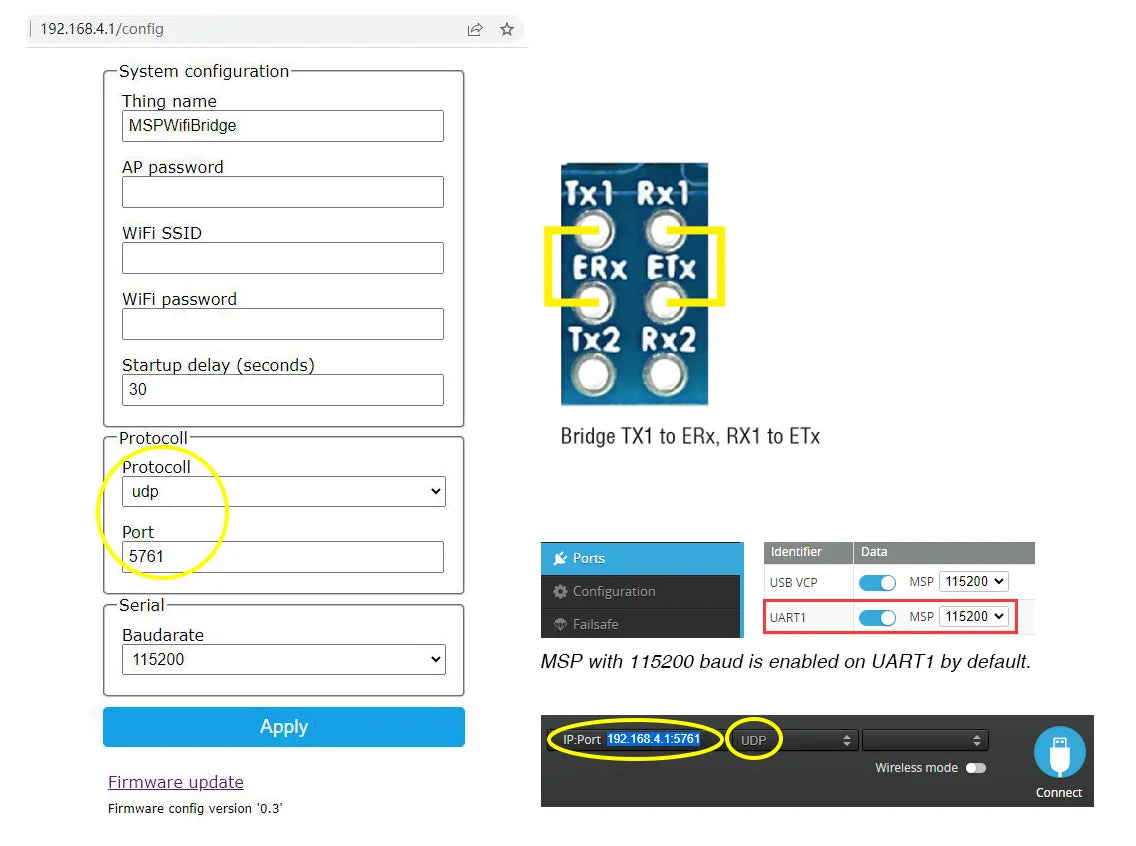
192.168.4.1/config システム構成 Thing_name MSPWifiBridge AP パスワード Ixl Rx| WiFi SSID ERx ETx WiFi パスワード Tx2 Rx2 Staz 遅延 (秒 30 プロトコル ブリッジ TX1 から erx、RXI から ETx プロトコル udp ポート 5761 ポント 識別子データ USB VC?
Related Collections