Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - コンパス付き QMC5883L モジュールデジタル AirSpeed 4 〜 9V FPV レーシングドローン用
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - コンパス付き QMC5883L モジュールデジタル AirSpeed 4 〜 9V FPV レーシングドローン用
MATEKSYS
通常価格
$79.00 USD
通常価格
セール価格
$79.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS 仕様
ホイールベース: ボトムプレート
使用: 乗り物とリモコンのおもちゃ
アップグレードパーツ/アクセサリ: GPS
工具消耗品: 組立カテゴリ
技術パラメータ: KV1100
サイズ: 表示どおり
リモコン周辺機器/デバイス: リモコン
推奨年齢: 12+y
RC パーツと付属品: M10Q-5883
数量: 1 個
原産地: 中国本土
モデル番号: Matek GNSS M10Q-5883
材質: 複合材料
四輪駆動属性: アセンブリ
車両タイプの場合: 飛行機
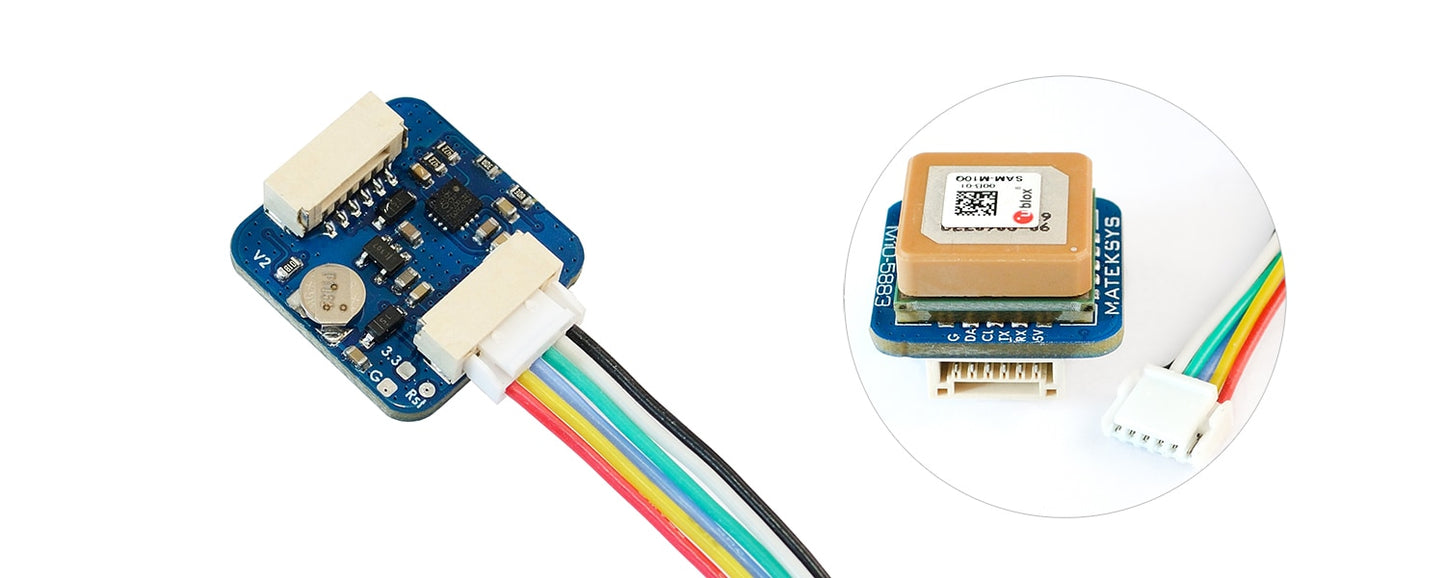
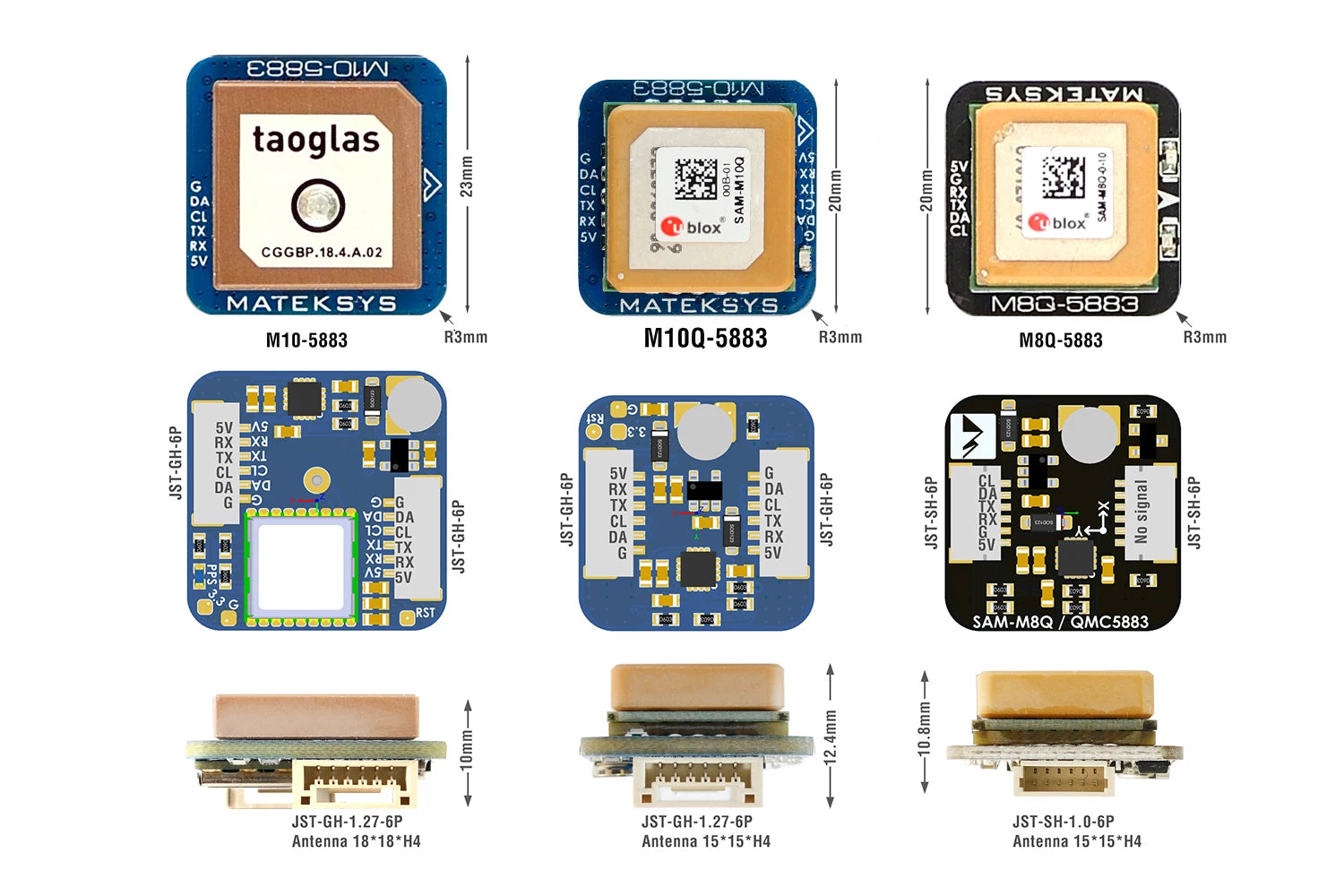
M10Q-5883 は、u-blox SAM-M10Q-00B を搭載したマルチコンステレーション GNSS モジュールを使用します。
SAM-M10Q は、u-blox M10 標準精度 GNSS プラットフォームを備え、優れた感度を提供します。すべての L1 GNSS 信号の取得時間。 SAM-M10Q は、4 つの GNSS (GPS、GLONASS、Galileo、および BeiDou) の同時受信をサポートします。可視衛星の数が多いため、受信機は最適な信号を選択できます。これにより、特に都市部の深い峡谷などの困難な条件下で、ポジションの利用可能性が最大化されます。 u-blox Super-S (Super-Signal) テクノロジーは、優れた RF 感度を提供し、見通し外シナリオでの動的位置精度を向上させることができます。
高利得 15 x 15 mm2 パッチ アンテナが最適なバランスを提供します。パフォーマンスと小型サイズの間で。全方向性アンテナの放射パターンにより、デバイス設置の柔軟性が向上します。
SAM-M10Q の詳細については、u-blox SAM-M10Q ページをご覧ください。
仕様
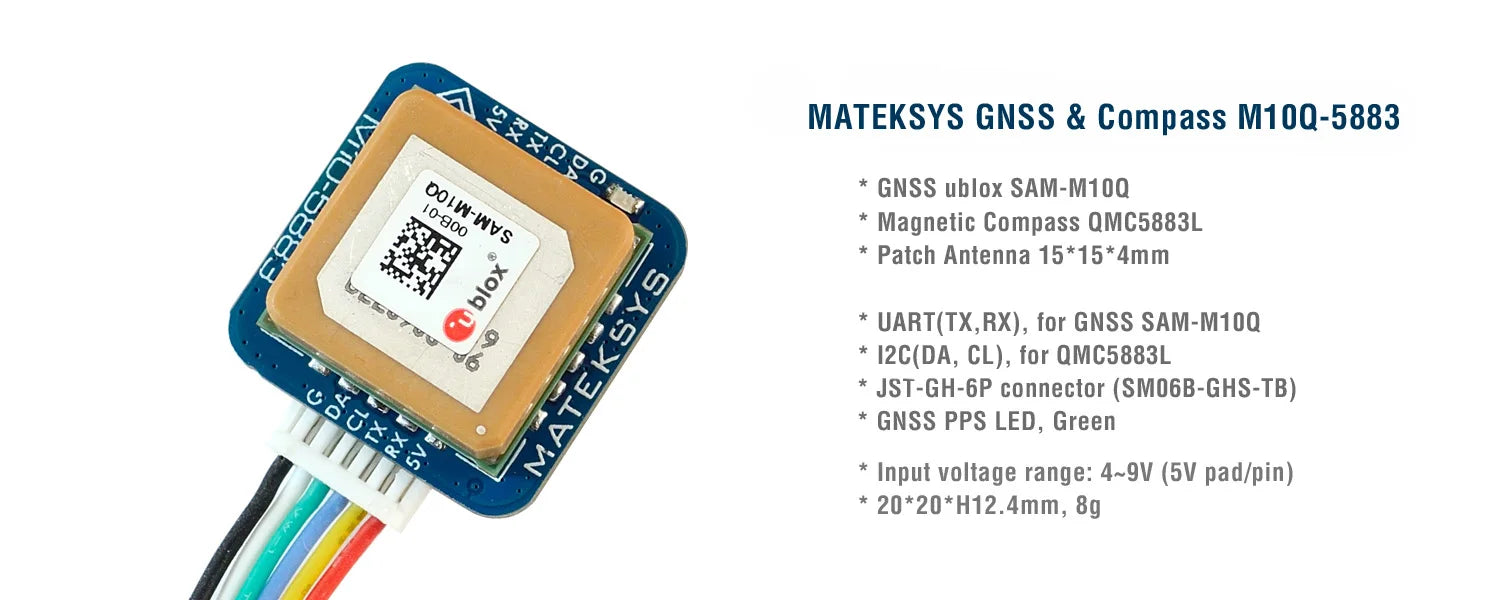
GNSS u-blox SAM-M10Q- 00B (GPS、GLONASS、Galileo、BeiDou)
磁気コンパス QMC5883L
パッチアンテナ 15*15*4mm
入力電圧範囲: 4~9V (5V パッド/ピン)
消費電力: 13mA
UART ボーレート: 9600 デフォルト
動作温度: -20~80 °C
GNSS 用 UART(TX、RX) インターフェイス SAM-M10Q-00B
Compass QMC5883L 用 I2C(DA、CL) インターフェイス
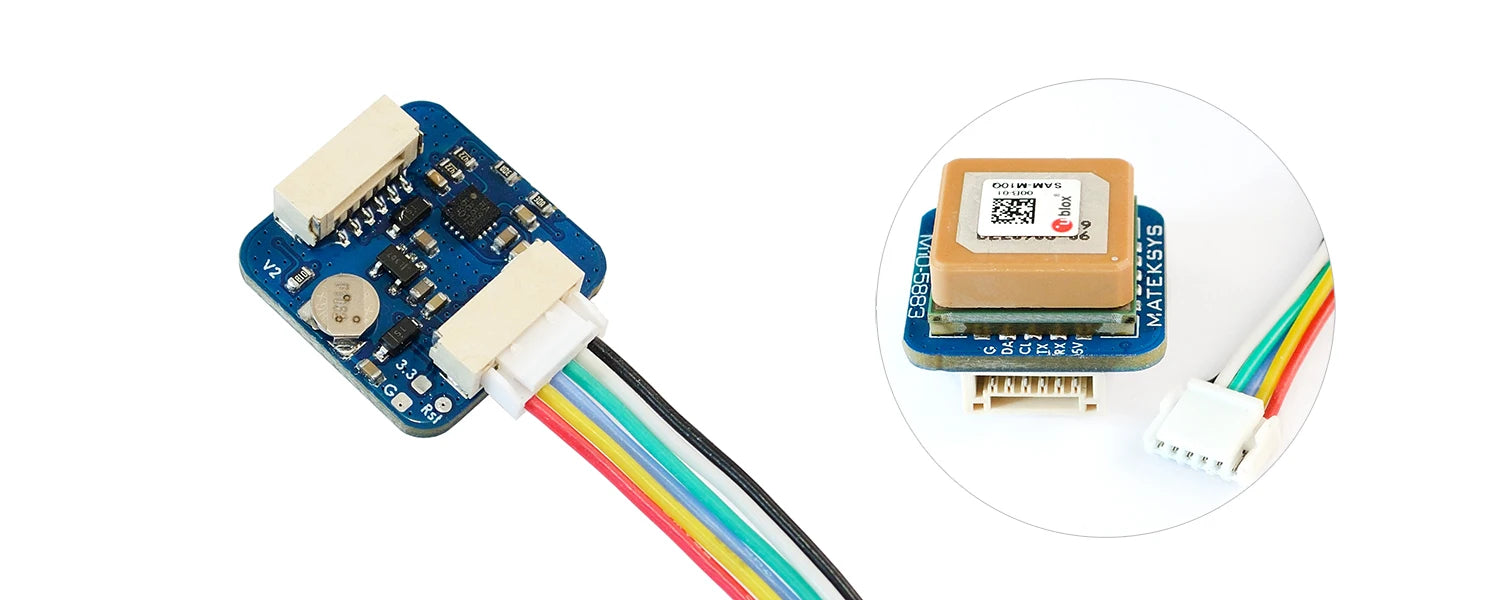
JST-GH-6P コネクタ (SM06B-GHS-TB)。 1.27mm ピッチ
GNSS PPS LED、緑色。 (電源投入後点灯、GNSS が 3D 修正を取得すると点滅 (1Hz))
プロトコル: UBX(u-blox) 5Hz@GPS+GAL+BDS B1C+GLO または NMEA 1Hz
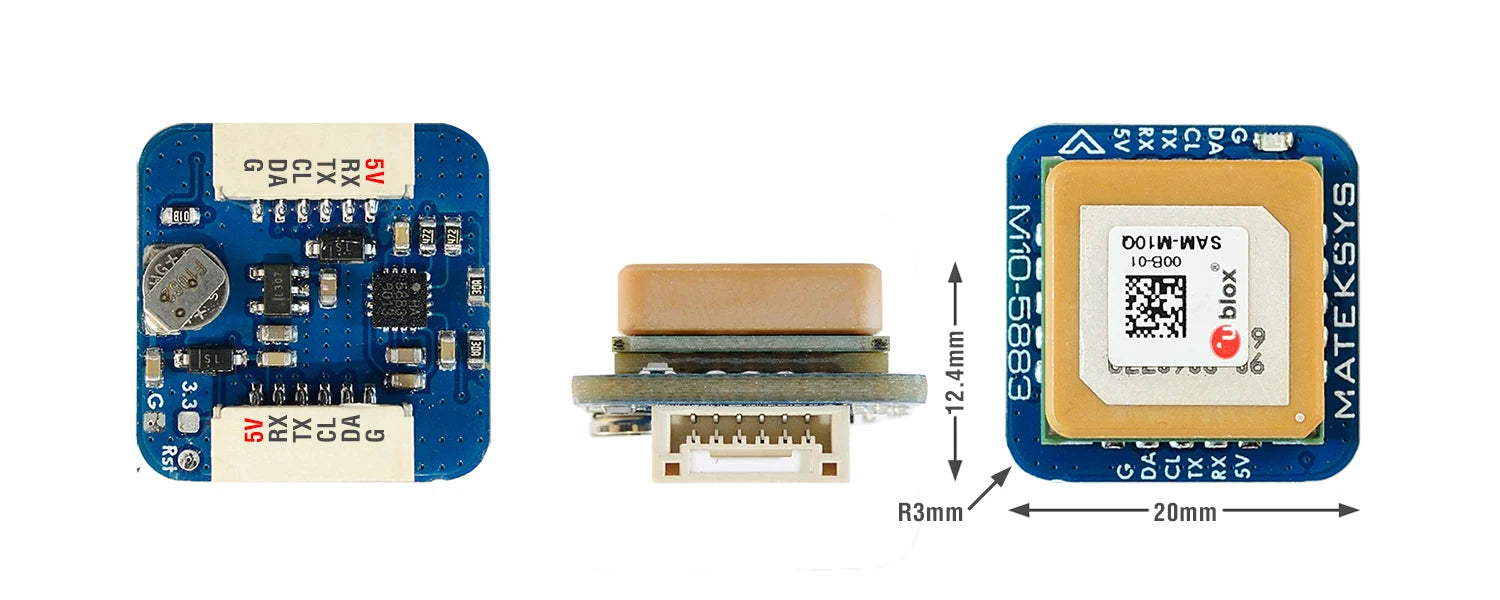
20mm*20mm*12.4mm
8g
M10Q-5883_step.zip
内容
M10Q-5883 x 1
JST-GH-6P ~ JST-GH-6P 20cm シリコン ワイヤー x 1
配線と設定
M10Q-5883 5V からフライト コントローラー 4~9V
M10Q-5883 RX からフライト コントローラー UART_TX
M10Q-5883 TX からフライト コントローラー UART_RX
M10Q-5883 CL からフライト コントローラー I2C_SCL
M10Q- 5883 DA からフライト コントローラー I2C_SDA
M10Q-5883 G G からフライト コントローラー GND
ヒントとメモ
コンパスの調整 (平らな取り付け): 磁力計を傾けることは強くお勧めしません !
INAV/BetaFLight:コンパス矢印を前方に設定し、フライト コントローラーの矢印が前方を向いているときに CW 270° 反転を設定します。
INAV/BetaFLight: コンパス矢印を後方に設定し、フライト コントローラーの矢印が前方を向いているときに CW 90° 反転を設定します。
Ardupilot/ミッション プランナー: 回転なし。
コンパス/磁力計は電線/ESC/モーター/鉄系材料から 10cm 離してください
------–
INAV 5.0.0、Betaflight 4.3.0 , ArduPilot 4.3 以降が必要です。
UBlox NEO-M9N、MAX-M10S、SAM-M10Q シリーズはすべてデータフラッシュを内蔵していません。GNSS の電源がオフになり、スーパーキャパシタが使い果たされたら。設定はデフォルトに戻ります。
UBX プロトコルは双方向です。フライト コントローラーのファームウェアは、UBX プロトコル経由で GPS の設定を変更できます。 u-center で GNSS モジュール パラメータを設定する必要はありません。
ublox FW 5.1 を搭載した SAM-M10Q のデフォルト設定は、QZSS と SBAS が有効になっている GPS、Galileo、GLONASS、および BeiDou B1C の同時受信です。
u-blox GNSS FW3.01 から開始すると、タイムパルスは UTC 時間に合わせられ、その時間はうるう秒がダウンロードされた後にのみ有効に設定されます。これには最大 12.5 分かかる場合があります。おそらく、PPS LED は、GPS が 3D 修正された直後には点滅しません。
M10Q-5883 は、受信機をリセットする機能を提供します。 「RST」パッドを少なくとも 100 ミリ秒間グランドにブリッジすると、コールド スタートがトリガーされます。 RESET はすべての情報を削除し、コールド スタートをトリガーします。これは回復オプションとしてのみ使用してください。配線とセットアップが正しく行われていることを確認したら。しかし、フライト コントローラーは GNSS モジュール (灰色の GPS アイコン) を検出できません。リセットしてみてください。
セラミック アンテナの傷はアンテナの調整の結果です。
GPS 関連の問題のトラブルシューティング: http://www.mateksys.com/?p=5712#tab-id-6
u-center Windows
*** M10Q-5883 PCB の最初のバッチの SKU シルク プリントは「M10-5883」です。
Matek Systems GNSS モジュール (M10Q-5883) ) と磁気コンパスとパッチ アンテナを備えたコンパス モジュール (QMC5883L) は、15mm x 15mm x 4mm のコンパクトなサイズと送受信 (TX/RX) 用の UART インターフェイスを備えています。
Related Collections