


MATEKSYS H7A3-SLIM フライトコントローラー - ICM42688P - 30x30
MATEKSYS H7A3-SLIM フライトコントローラー - ICM42688P - 30x30
MATEKSYS
受取状況を読み込めませんでした
この MATEKSYS H7A3-SLIM フライトコントローラー は、コンパクトな30x30mmデザインで高性能を提供します。STM32H7A3RIT6 MCU、280MHz Cortex-M7プロセッサ、1.4MB RAM、2MB Flashを搭載しています。ICM42688P IMU、SPL06-001気圧計、AT7456E OSD、128MB Flashブラックボックスを備え、正確なデータと十分なログ記録を提供します。コントローラーには6つのUART、11のPWM出力、1つのI2C、1つのCANポート、4つのADCチャネルが含まれています。また、3つのステータスLED、USB Type-Cポート、切り替え可能な9V出力も備えています。30.5 x 30.5mmのマウントパターン、4mmの穴、3mmのゴムブッシュを持ち、重さはわずか7gで、FPVレースやフリースタイル飛行に最適です。カスタム統合用の3Dステップファイルが含まれています。
特徴
- 画面表示
- 30x30 マウント
- コンパクトデザイン
- 接続性
- 軽量
仕様
仕様
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- バロ: SPL06-001
- OSD: AT7456E
- ブラックボックス: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) 内蔵反転付き。
- 11x PWM 出力
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Current, VB2, Cur2)
- 3x LED(FC ステータス用(青、赤)および 3.3V インジケーター(赤)
- USB Type-C(USB2.0)
- 2x 4in1 ESC用の2x JST-SH1.0_8ピンコネクタに8x PWM出力
- 1x JST-GH1.25_4ピンコネクタ (5V/CAN-H/CAN-L/G)
- 9V出力 ON/OFF 切り替え可能
- デジタルビデオOSDは任意の空きUARTでサポートされています
電源
- Vbat入力: 6~36V (2~8S LiPo)
- BEC: 5V 2A 定常 (最大3A)
- BEC: 9V 2A 定常 (最大3A)
- LDO 3.3V: 最大200mA
- 内蔵の電流センサーなし
- ADC VB2パッドは最大69Vをサポート (電圧分割: 1K:20K)
FCファームウェア
- ArduPilot: MATEKH7A3 (4.6またはそれ以降)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- STM32CubeProgrammerでのフラッシング
物理的
- マウント: 30.5 x 30.5mm, Φ4mm ゴムブッシュ付き Φ3mm
- 寸法: 36 x 36 x 5 mm
- 重量: 7g
- 3Dステップ H7A3-SLIM_step.zip
含まれる
- 1x H7A3-SLIM
- 6x シリコンゴムブッシュ M4からM3
- 2x JST-SH1.0_8ピンケーブル、5cm, & 8ピンコネクタ
- 1x JST-GH-4P to JST-GH-4Pケーブル(CANポート用)、20cm
詳細

MATEKSYS H7A3-SLIMフライトコントローラーは、STM32H7A3 MCU、ICM42688P IMU、および30.5mmのマウントパターンのUSB-Cポートを使用しています。

MATEKSYS H7A3-SLIMフライトコントローラーは、USB-Cポートを備えたコンパクトな30x30レイアウトを使用し、配線を整然とするための明確にラベル付けされたパッドがあります。

MATEKSYS H7A3-SLIMは、配線を整然とし、簡単にセットアップできるように、デュアルJST-SH 1.0 8ピンコネクタとJST-GH 4ピンポート、USB Type-Cを使用しています。

MATEKSYS H7A3-SLIMは、カメラ/VTxビデオ、UART、CAN、および電源接続用の明確にラベル付けされたはんだパッドとポートを使用しています。
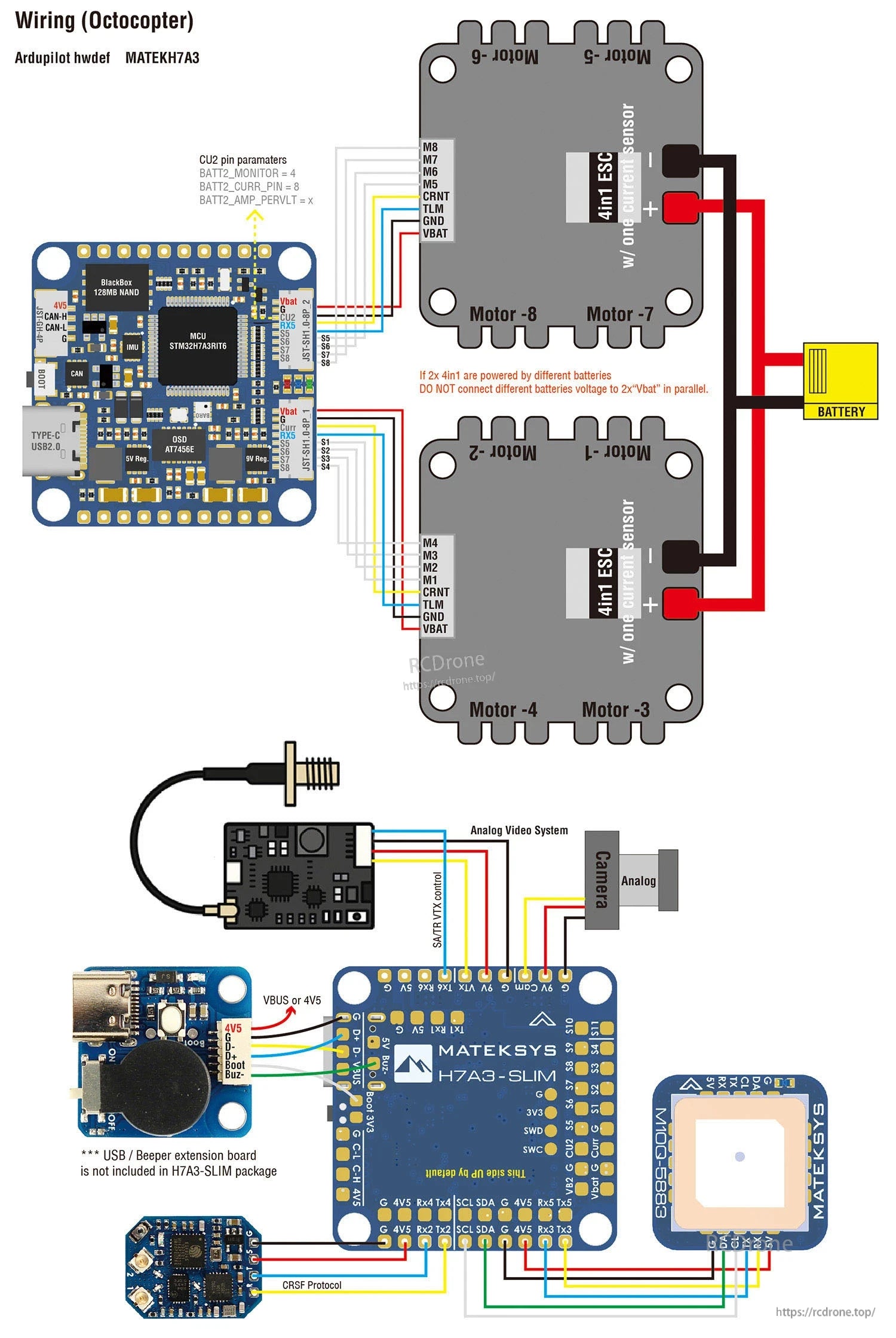
MATEKSYS H7A3-SLIMは、デュアル4-in-1 ESC、VBAT電源、GPS、受信機、およびアナログビデオコンポーネントを接続するための明確にラベル付けされたパッドを使用しています。

ArduPilotマッピング
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | 5 V耐性I/O | TIM1_CH2 | DMA/Bi-DShot | グループ1 |
| S2 | PWM2 GPIO51 | 5 V耐性I/O | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | 5 V耐性I/O | TIM2_CH1 | DMA/Bi-DShot | グループ2 | |
| S4 | PWM4 GPIO53 | 5 V耐性I/O | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | 5 V耐性I/O | TIM3_CH3 | DMA/Bi-DShot | グループ3 | |
| S6 | PWM6 GPIO55 | 5 V耐性I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 V耐性I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 V耐性I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 V耐性I/O | TIM4_CH1 | DMA/DShot | グループ4 | |
| S10 | PWM10 GPIO59 | 5 V耐性I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5V耐性I/O | TIM16_CH1 | DMA/DShot | グループ5 | |
| PWM1〜PWM11はDshotおよびPWMに対応しています。しかし、Dshotと通常のPWM出力を混合することはグループに制限されています。 つまり、グループ内の出力にDshotを有効にするには、そのグループ内のすべての出力がDshotとして構成され、使用される必要があります。PWM出力ではありません。 サーボとモーターが同じグループに混在している場合、このグループはサーボの仕様に従って最低PWM周波数で動作することを確認してください。 つまり、サーボが最大50Hzをサポートする場合、このグループのESCは50Hzで動作しなければなりません。 |
||||||
| PINIO | 9Vスイッチ | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbatパッド | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Currパッド | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V耐性I/O | オンボードBaro SPL06-001 | アドレス | 0x76 |
| デジタルエアスピードI2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| 磁力計 | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V耐性I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
GPS コンパス 空気速度センサー |
GPS_TYPE COMPASS_TYPEMASK ARSPD_TYPE |
9 0 8 |
| UART | USB | USB | コンソール | SERIAL0_PROTOCOL | 2 | |
| TX1 RX1 | USART1 w/DMA | 5 V耐障害I/O | テレメトリー | SERIAL1_PROTOCOL | 2 | |
| TX2 RX2 | USART2 w/DMA | 5 V耐障害I/O | RC入力/受信機 | SERIAL2_PROTOCOL | 23 | |
| TX3 RX3 | USART3 w/DMA | 5 V耐障害I/O | GPS | シリアル3プロトコル | 5 | |
| TX4 RX4 | UART4 DMAなし | 5 V耐性I/O | 予備 | シリアル4プロトコル | -1 | |
| TX5 RX5 | UART5 DMAなし | 5 V耐性I/O | 予備 | シリアル5プロトコル | -1 | |
| TX6 RX6 | USART6 DMAなし | 5 V耐性I/O | 予備 | シリアル6プロトコル | -1 | |
RC入力
RC入力はUSART2(シリアル2)に設定されています。すべてのシリアルRCプロトコルをサポートしています。デフォルトではSERIAL2_PROTOCOL=23です。
- PPMはサポートされていません。
- CRSFはTx2 & Rx2接続を必要とし、SERIAL2_OPTIONSを「0」(デフォルト)に設定します。
- SBUS/DSM/SRXLはRx2ピンに接続されますが、SBUSはSERIAL2_OPTIONSを「3」に設定する必要があります。
- FPortはTx2への接続が必要で、SERIAL2_OPTIONSを「7」に設定します。テレメトリーが機能しない場合は、 SERIAL7_OPTIONS = 135に設定してみてください。
- SRXL2はTx2への接続が必要で、自動的にテレメトリーを提供します。SERIAL2_OPTIONSを「4」に設定します。
- ArduPilotでは、任意のUARTをRCシステム接続に使用でき、PPMを除くすべてのプロトコルと互換性があります。詳細については ラジオコントロールシステム をご覧ください。
ArduPilotリレー(PINIO)
- デフォルトで9V出力ON
- PC13 PINIO1 出力 GPIO(81) //9V電源 switche.g.
- RELAY1_FUNCTION 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_OPTION 28 //リレーのオン/オフ、送信機のCH7を使用して9VのON/OFFを設定
設定された機能は、補助スイッチのPWM値が1800を超えるとトリガーされます。値が1200未満になると無効になります。
スイッチが高いときと低いときの送信機から送信されるPWM値を、Mission Plannerの初期設定 >> 必須ハードウェア >> ラジオキャリブレーション画面で確認してください。1800を超えないか、1200を下回らない場合は、送信機でサーボのエンドポイントを調整するのが最適です。
Related Collections


