

MUWEIDU K12060 モーター 24V 60W ブラシレスDC FOCサーボモーター 18ビットエンコーダー搭載、RS485/CAN、115rpm
MUWEIDU K12060 モーター 24V 60W ブラシレスDC FOCサーボモーター 18ビットエンコーダー搭載、RS485/CAN、115rpm
MUWEIDU
通常価格
$607.00 USD
通常価格
セール価格
$607.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
MUWEIDU K12060 モーターは、ブラシレス DC サーボモーター (Kシリーズ中高速ブラシレス DC モーター)で、統合された電動ドライブ設計(内蔵ドライバー)と磁気エンコーダーを備えています。速度/位置制御と RS485 または CAN 通信をサポートしており、コンパクトで統合されたロボットおよび自動化ジョイント向けに設計されています。
主な特徴
- 高性能FOCサーボモーター
- 統合型電動ドライブ設計:内蔵ドライバーと磁気エンコーダ
- 統合型 / 軽量 / 高精度 / 高トルク設計
- エンコーダ精度が14ビットから18ビットにアップグレード
- 最適化されたモーターコギングトルク
- PWM入力対応
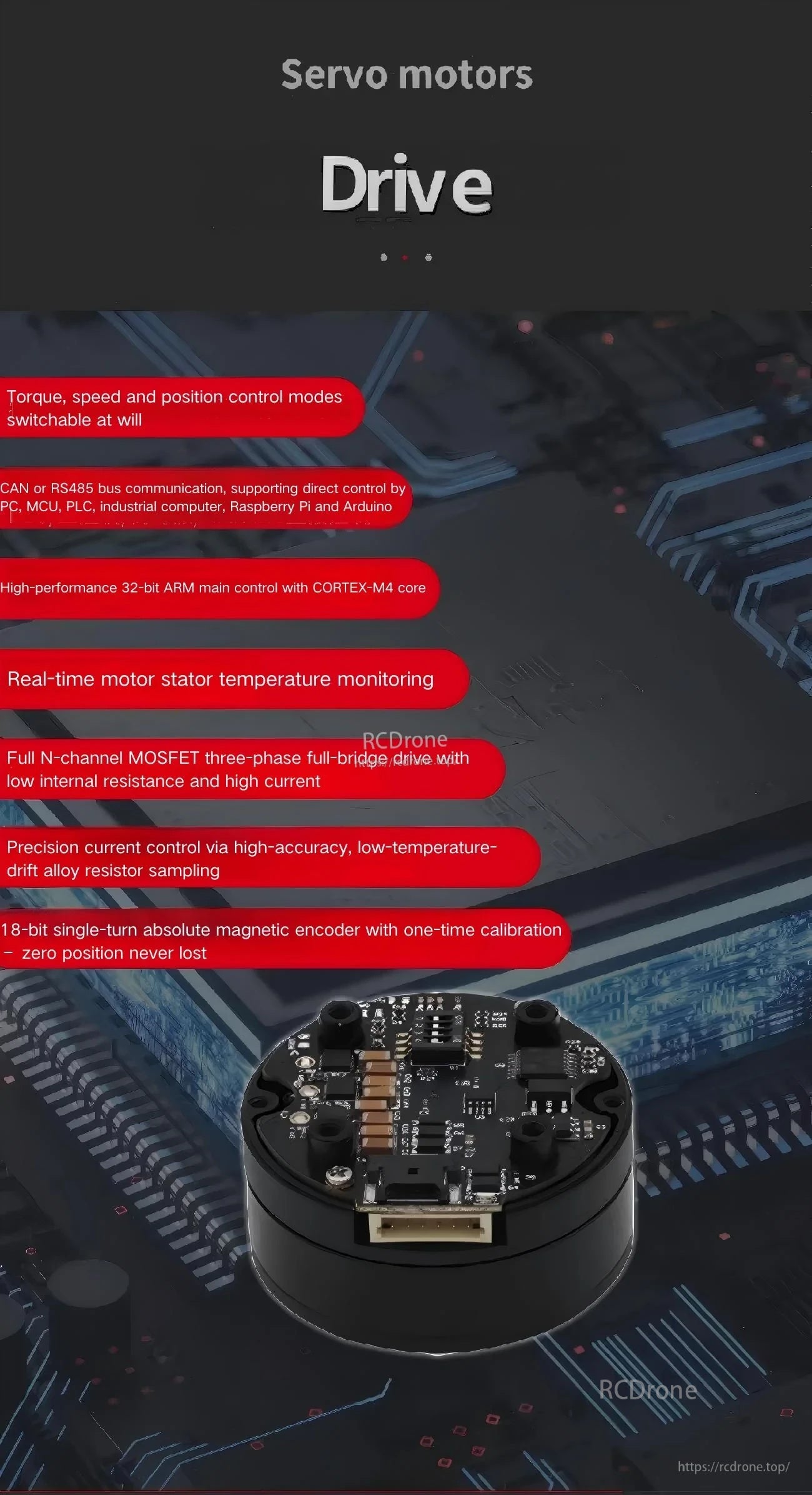
- トルク、速度、位置制御モードを自由に切り替え可能
- CANまたはRS485バス通信;PC、MCU、PLC、産業用コンピュータ、Raspberry Pi、Arduinoによる直接制御をサポート
- 高性能32ビットARMメインコントロール(CORTEX-M4コア)
- リアルタイムモーター固定子温度モニタリング
- 低内部抵抗と高電流を持つフルNチャネルMOSFET三相フルブリッジドライブ
- 高精度、低温ドリフト合金抵抗サンプリングによる精密電流制御
- 18ビット単回転絶対磁気エンコーダー、1回のキャリブレーションでゼロ位置を失わない
- 軽量設計:航空機グレードのアルミニウム素材を使用したフラット構造
- 高トルク出力:外部ローターとネオジム鉄ボロン磁石の組み合わせ
- 超高標準製品設計
仕様
| モデル | K12060 |
| 定格電圧 | 24V |
| 定格電流 | 4A |
| ピーク電力 | 60W |
| 定格トルク | 5N.m |
| ピークトルク | 10N.m |
| 定格速度 | 115rpm |
| エンコーダ | 18ビット |
| ローター慣性 | 5500gcm^2 |
| モーター温度監視 | はい |
| 制御モード | 速度/位置 |
| 通信プロトコル | RS485またはCAN |
| 全体寸法 | Φ120mm x 49mm |
| 重量 | 1147g |
インターフェース定義
- IDスイッチ
- CAN/RS485
| B/L | RS485-BまたはCAN-L |
| A/H | RS485-AまたはCAN-H |
| V- | 負電源 |
| V- | 負電源 |
| V+ | 正の電源 |
| V+ | 正の電源 |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足ロボット
- AGV車両
- ARUロボット
- 検査ロボット
- ハンドヘルドカメラ
- LiDAR
- ジンバルポッド
統合ガイダンスおよび販売前の質問(通信配線、制御モード、ドキュメント)については、[email protected] orに連絡してください。https://rcdrone.top/ .
マニュアル
詳細

統合ロボットジョイント用に設計されたコンパクトなKシリーズFOCサーボモーターで、モーター, ドライバーとエンコーダーを1つのハウジングに統合しています。

統合電動駆動設計により、モーター、ドライバーエレクトロニクス、磁気エンコーダーを組み合わせることで配線を削減し、スペースを節約します。
トルク、速度、位置制御を切り替え、PC、MCU、PLC、または組み込みコントローラー用のCANまたはRS485通信を提供します。

明確なインターフェースラベリングには、IDスイッチと電源、CAN/RS485バス、UART信号接続用の専用ピンが含まれています。

PCベースのツールは、複数の制御モードにわたるパラメータ調整、テスト、およびファームウェアの更新をサポートします。

自動化やロボティクスの構築に適しており、検査プラットフォーム、カメラスタビライゼーション、LiDAR、ジンバルポッドなどに使用されます。
Related Collections

