

MUWEIDU K4028 モーター 12V FOC サーボブラシレスDCモーター、18ビットエンコーダー、RS485/CAN、560rpm
MUWEIDU K4028 モーター 12V FOC サーボブラシレスDCモーター、18ビットエンコーダー、RS485/CAN、560rpm
MUWEIDU
通常価格
$187.00 USD
通常価格
セール価格
$187.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
MUWEIDU K4028モーターは、高性能FOC サーボモーター として設計されたKシリーズの中高速ブラシレスDCモーターです。18ビットエンコーダーを搭載し、速度/位置制御をサポートし、ロボティクスおよび自動化システムへの統合のためにRS485またはCANを介して通信します。
主な特徴
- Kシリーズ中高速ブラシレスDCモーター;高性能FOCサーボモーター
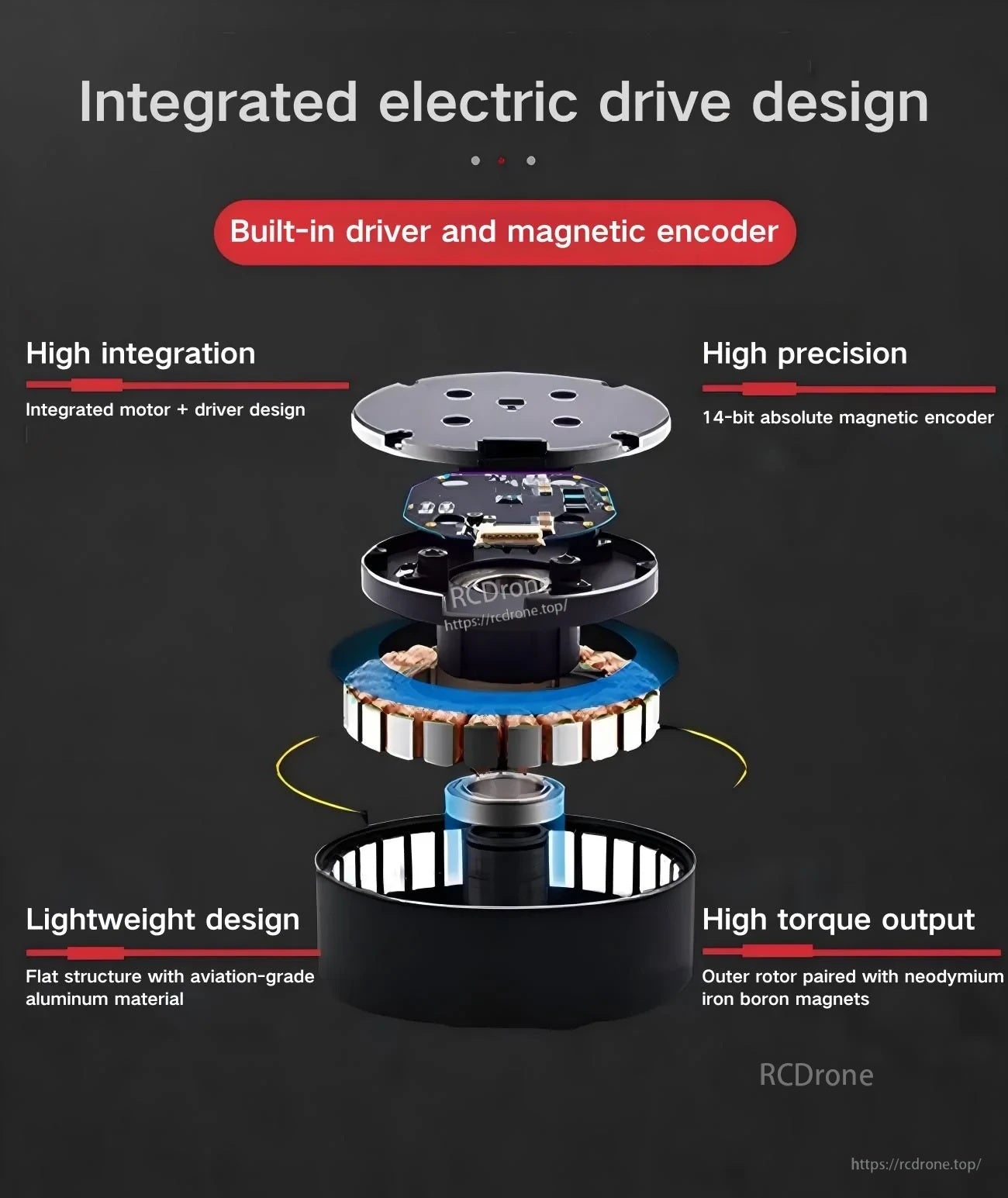
- 統合された電動ドライブ設計;内蔵ドライバーと磁気エンコーダ
- 統合モーター + ドライバー設計
- 航空グレードのアルミニウム素材を使用した軽量フラット構造
- 高トルク出力;外部ローターとネオジウム鉄ボロン磁石の組み合わせ
- モーター温度監視:はい
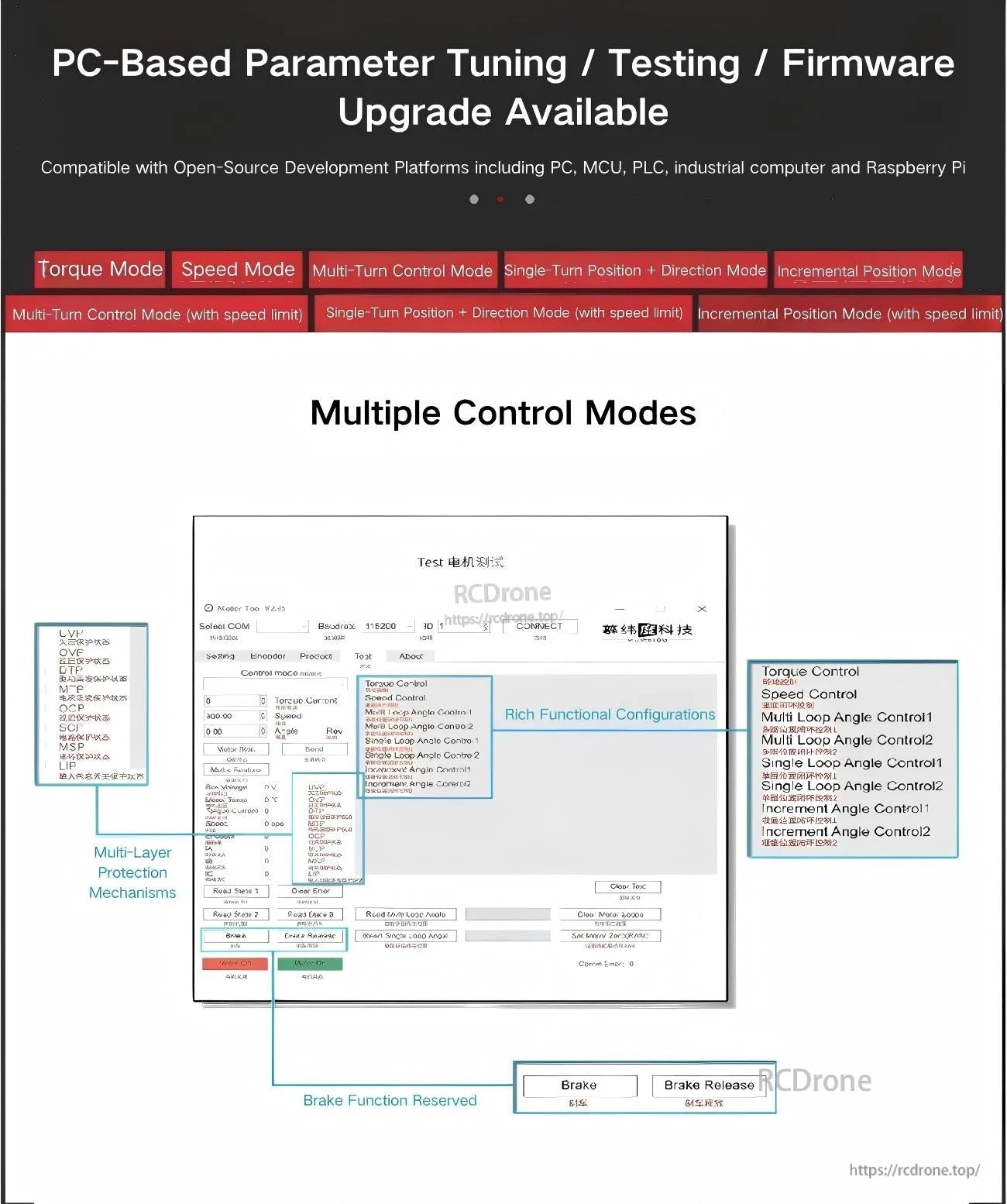
- 表示される複数の制御モード:トルクモード、スピードモード、マルチターン制御モード(速度制限付き)、シングルターン位置 + 方向モード(速度制限付き)、増分位置モード(速度制限付き)
- PCベースのパラメータ調整 / テスト / ファームウェアアップグレードが可能
- PC、MCU、PLC、産業用コンピュータ、Raspberry Piを含むオープンソース開発プラットフォームと互換性あり
- マルチレイヤー保護メカニズム;ブレーキ機能を予約(ブレーキ / ブレーキ解除)
- PWM入力対応
- 最適化されたモーターコギングトルク
- エンコーダ精度アップグレードノート表示: 14ビットから18ビットへ
仕様
| モデル | K4028 |
| 定格電圧 | 12V |
| 定格電流 | 1.43A |
| ピークパワー | 8.9W |
| 定格トルク | 0.15 N.m |
| ピークトルク | 0.33 N.m |
| 定格速度 | 560 rpm |
| エンコーダ | 18ビット |
| ローター慣性 | 81 gcm² |
| モーター温度監視 | はい |
| 制御モード | 速度/位置 |
| 通信プロトコル | RS485またはCAN |
| 全体寸法 | Φ39.6mm × 28mm |
| 重量 | 90 g |
インターフェース定義 (CAN/RS485)
| インターフェース | 注意 |
|---|---|
| B/L | RS485-B または CAN-L |
| A/H | RS485-A または CAN-H |
| V- | 負電源 |
| V- | 負電源 |
| V+ | 正電源 |
| V+ | 正電源 |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
モーターには識別/設定用のIDスイッチが付いています。
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
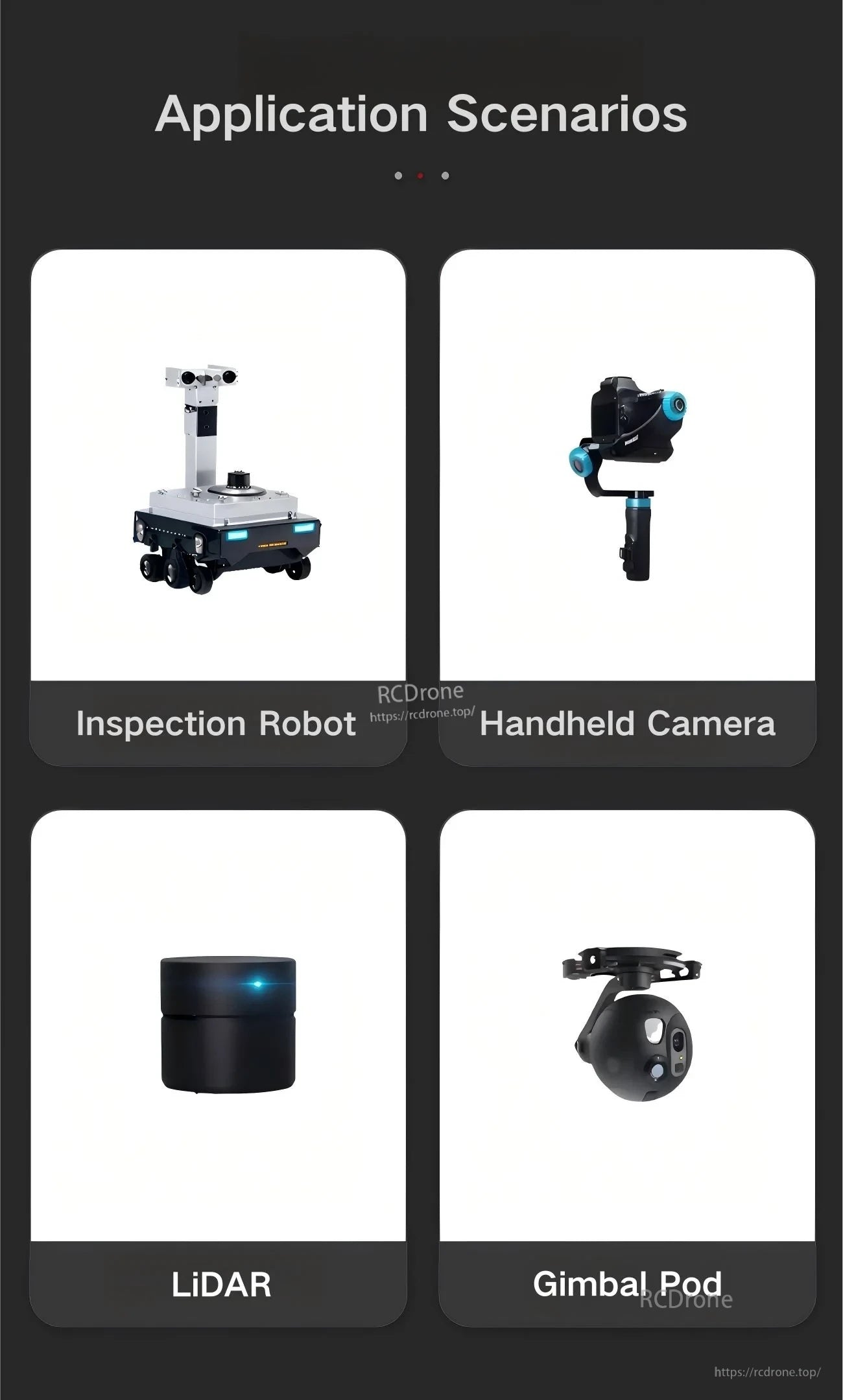
- 検査ロボットシステム
- ハンドヘルドカメラシステム
- LiDAR関連プラットフォーム
- ジンバルポッドシステム
マニュアル / ドキュメント
MUWEIDU K4028モーター(RS485/CAN)の選定ガイダンスまたは統合サポートについては、[email protected] orにお問い合わせください。 https://rcdrone.top/.
詳細

統合された電動駆動コンセプトを基に構築されたK4028は、コンパクトなBLDCモーター、ドライバー、エンコーダーを組み合わせて、精密なサーボ制御を実現します。
オールインワンのモーター + ドライバースタックは、配線を削減し、ロボティクスおよび自動化の構築における統合を簡素化します。

明確なインターフェースラベリングにより、RS485またはCAN通信の迅速なセットアップがサポートされ、バス上のデバイス識別のためのIDスイッチがあります。
PCツールを使用すると、パラメータ調整、テスト、ファームウェアのアップグレードが可能で、複数のトルク、速度、位置制御モードが利用できます。
検査ロボット、ジンバル、LiDAR関連プラットフォームなどのコンパクトなモーションコントロールタスクに非常に適しています。
Related Collections

