

MUWEIDU K4030 モーター サーボモーター 16V 750rpm 0.65N.m ピークトルク 18ビットエンコーダー RS485/CAN
MUWEIDU K4030 モーター サーボモーター 16V 750rpm 0.65N.m ピークトルク 18ビットエンコーダー RS485/CAN
MUWEIDU
通常価格
$194.00 USD
通常価格
セール価格
$194.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
MUWEIDU K4030モーターは、Kシリーズの中高速ブラシレスDCモーター(サーボモーター)で、統合された電動ドライブ設計(内蔵ドライバーと磁気エンコーダ)を備えています。速度/位置制御をサポートし、RS485またはCANを介して通信するため、コンパクトなロボットおよびメカトロニクスアクチュエーターに適しています。
主な特徴
- 高性能FOCサーボモーター
- 統合モーター + ドライバーデザイン
- 内蔵ドライバーと磁気エンコーダ
- エンコーダ精度が14ビットから18ビットにアップグレード
- 最適化されたモーターコギングトルク
- PWM入力対応
- 超高標準製品デザイン
- PCベースのパラメータ調整 / テスト / ファームウェアアップグレードが可能
- PC、MCU、PLC、産業用コンピュータ、Raspberry Piを含むオープンソース開発プラットフォームと互換性あり
- 表示される複数の制御モード: トルクモード、スピードモード、マルチターン制御モード(速度制限付き)、シングルターン位置 + 方向モード(速度制限付き)、インクリメンタル位置モード(速度制限付き)
- マルチレイヤー保護メカニズム(ソフトウェアUI機能テキスト)
- ブレーキ機能予約済み(ソフトウェアUI機能テキスト)
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
- 検査ロボット
- ハンドヘルドカメラ
- LiDAR
- ジンバル/ポッド
仕様
| モデル | K4030 |
| 定格電圧 | 16V |
| 定格電流 | 2.2A |
| ピークパワー | 22W |
| 定格トルク | 0.25N.m |
| ピークトルク | 0.65N.m |
| 定格速度 | 750rpm |
| エンコーダ | 18ビット |
| ローター慣性 | 81gcm^2 |
| モーター温度監視 | はい |
| 制御モード | 速度/位置 |
| 通信プロトコル | RS485またはCAN |
| 全体寸法 | Φ39.6mm x 23mm |
| 重量 | 65g |
インターフェース / ピン定義
インターフェースラベル: IDスイッチ, CAN/RS485.
| インターフェース | 注意 |
|---|---|
| B/L | RS485-B または CAN-L |
| A/H | RS485-A または CAN-H |
| V- | 負電源 |
| V- | 負電源 |
| V+ | 正電源 |
| V+ | 正電源 |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
マニュアル
選択ガイダンスや統合サポート(RS485/CAN配線、制御モード設定、またはドキュメントに関する質問)のために、https://rcdrone.top/までサポートにお問い合わせいただくか、 [email protected]. までメールしてください。
詳細

高性能トルク、速度、位置制御のための統合ドライブエレクトロニクスを備えたコンパクトなKシリーズサーボモーターです。
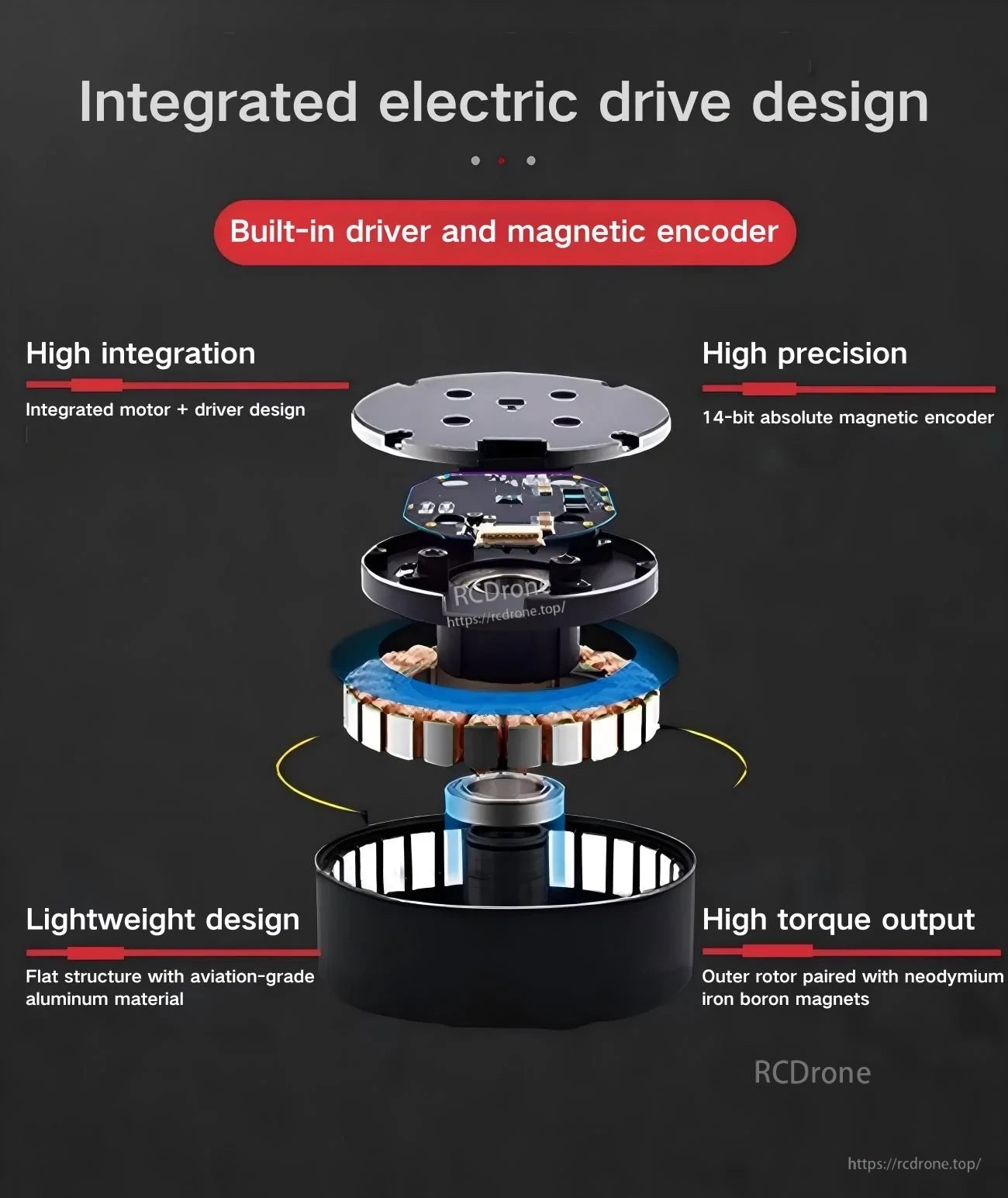
統合されたモーター、ドライバー、磁気エンコーダーは、配線を減らし、コンパクトなロボティックアクチュエーターの構築を簡素化します。

明確なインターフェースラベリングにより、電源の配線やRS485またはCAN通信の設定が容易になります。

PCベースの調整とテストは、複数の制御モードをサポートし、ファームウェアのアップグレードと保護機能がソフトウェアで利用可能です。
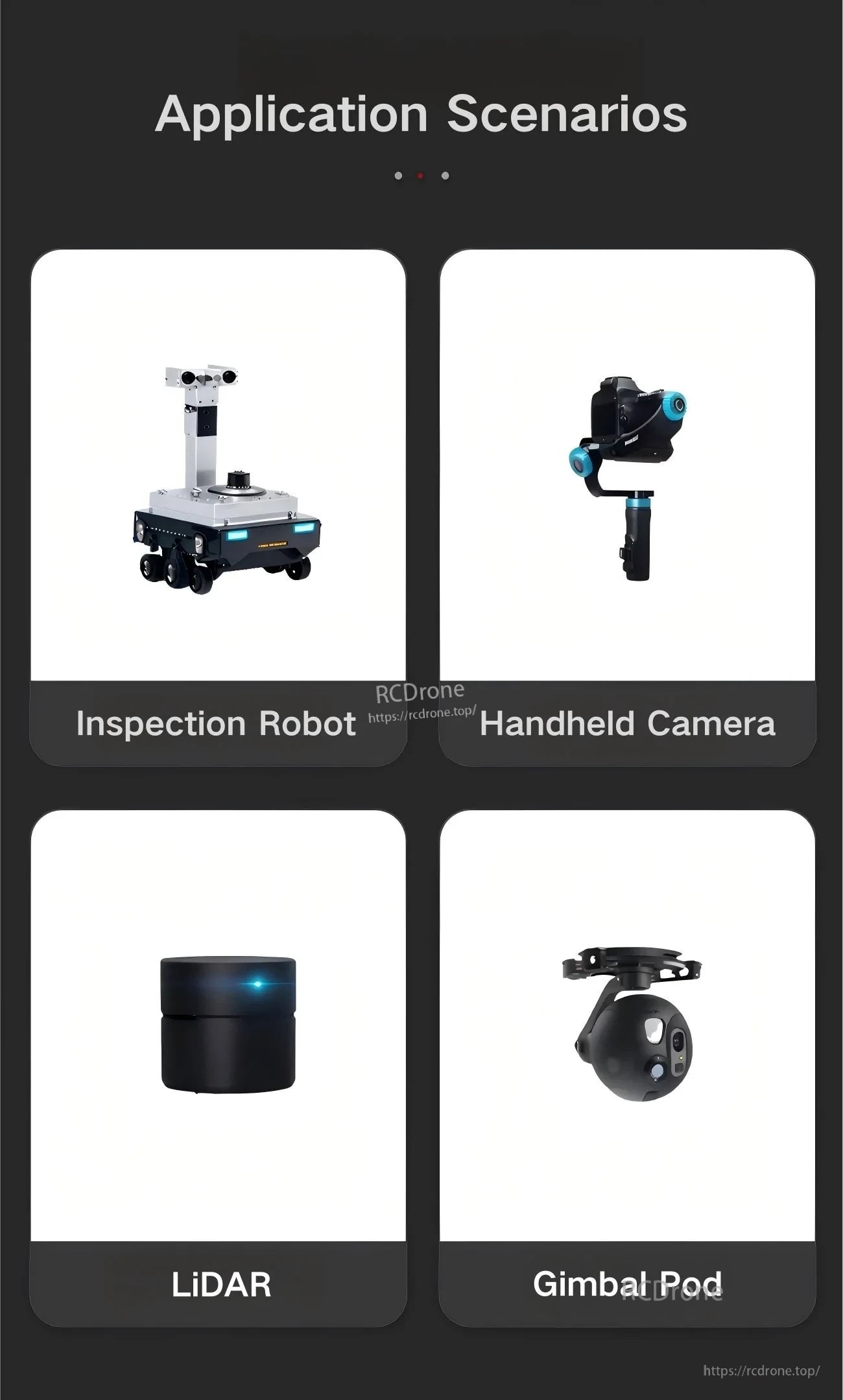
ロボティクスや安定化プロジェクトに適しており、検査プラットフォーム、ジンバル、センサーペイロードなどに使用されます。
Related Collections

