

MUWEIDU K5030 (10/35T) モーター 16V 18ビットエンコーダー RS485/CAN 一体型ドライブサーボモーター(ロボット用)
MUWEIDU K5030 (10/35T) モーター 16V 18ビットエンコーダー RS485/CAN 一体型ドライブサーボモーター(ロボット用)
MUWEIDU
通常価格
$215.00 USD
通常価格
セール価格
$215.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
MUWEIDU K5030モーターは、Kシリーズの中高速ブラシレスDCモーター(サーボモーター)で、統合された電動ドライブ設計(内蔵ドライバーと磁気エンコーダー)を備えています。速度/位置制御をサポートし、ロボティクスおよび自動化におけるコンパクトで統合されたモーションシステム向けに設計されています。
主な特徴
- 高性能FOCサーボモーター
- 統合型電動ドライブ設計:統合モーター + ドライバー
- 内蔵ドライバーと磁気エンコーダ
- エンコーダ精度が14ビットから18ビットにアップグレード
- 最適化されたモーターコギングトルク
- PWM入力対応
- PCベースのパラメータ調整 / テスト / ファームウェアアップグレードが可能
- PC、MCU、PLC、産業用コンピュータ、Raspberry Piを含むオープンソース開発プラットフォームと互換性あり
- 表示される複数の制御モード:トルクモード、スピードモード、マルチターン制御モード、シングルターン位置 + 方向モード、インクリメンタル位置モード(速度制限付きのモード表示)
- 複数の保護メカニズム(示されている通り)
- ブレーキ機能予約 / ブレーキ解除(示されている通り)
仕様
| モデル | K5030 (10/35T) |
| 定格電圧 | 16V |
| 定格電流 | 4.9A / 1.22A |
| ピークパワー | 104W / 8.8W |
| 定格トルク | 0.38 N.m / 0.32 N.m |
| ピークトルク | 0.7 N.m / 0.82 N.m |
| 定格速度 | 1550 rpm / 250 rpm |
| エンコーダ | 18ビット |
| ローター慣性 | 202 gcm² |
| モーター温度監視 | はい |
| 制御モード | 速度/位置 |
| 通信プロトコル | RS485またはCAN |
| 全体寸法 | Φ49mm×33.9mm |
| 重量 | 175 g |
インターフェース定義
- IDスイッチ
- CAN/RS485
| B/L | RS485-BまたはCAN-L |
| A/H | RS485-AまたはCAN-H |
| V- | 負電源 |
| V- | 負電源 |
| V+ | 正電源 |
| V+ | 正電源 |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足ロボット
- AGV車両
- ARUロボット
- 検査ロボット
- ハンドヘルドカメラ
- LiDAR
- ジンバルポッド
統合サポートおよび販売前の質問(インターフェース選択、RS485/CAN配線、ドキュメント)については、[email protected] orに連絡するか、https://rcdrone.top/ . を訪問してください。
マニュアル
詳細

K5030は、ロボットジョイントと自動化軸用に、ブラシレスDCサーボモーター、ドライバー、およびアップグレードされたエンコーダをコンパクトなパッケージに統合しています。
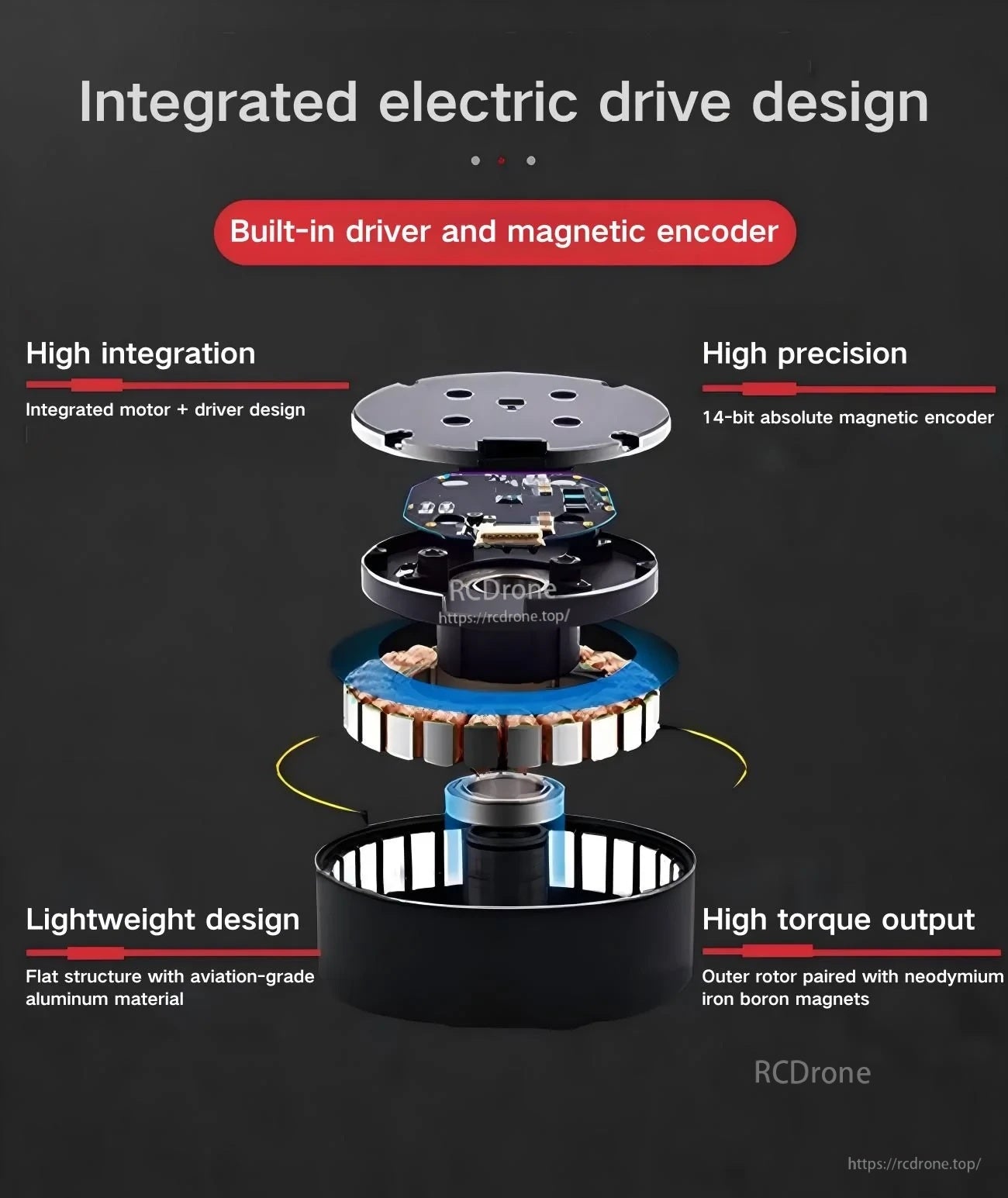
統合された電動ドライブ設計は、モーター、ドライバーエレクトロニクス、および磁気エンコーダを組み合わせて配線を削減し、インストールを簡素化します。

明確なピンラベリングは、簡単なCANまたはRS485接続をサポートし、システム統合のためのUART TX/RXおよび電源端子を提供します。
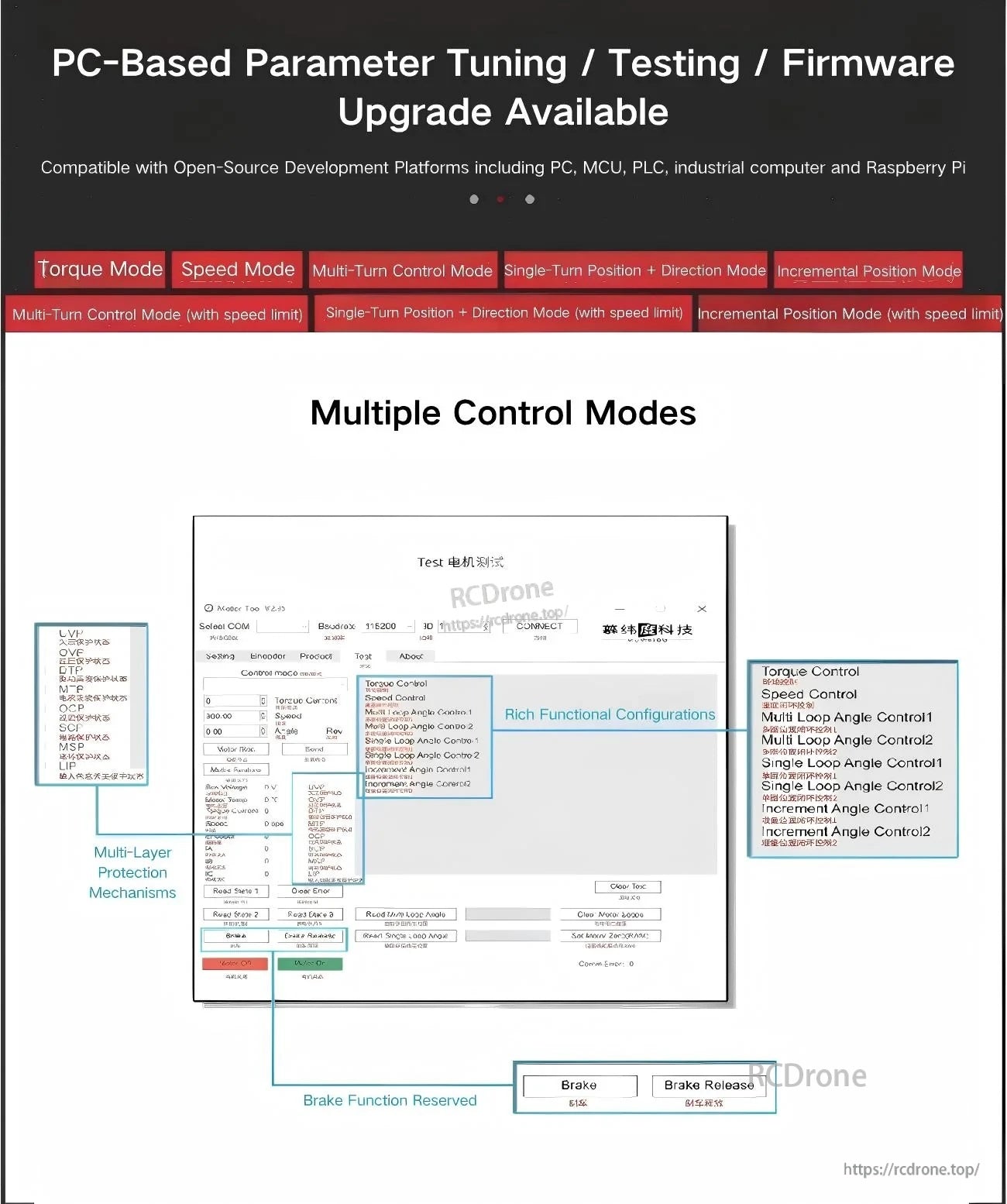
PCソフトウェアサポートにより、パラメータ調整、テスト、およびファームウェアのアップグレードが可能で、さまざまな動作タスクに対応する複数の制御モードがあります。

Related Collections

