

MUWEIDU K7030 モーター 24V ブラシレスDC FOCサーボモーター、18ビットエンコーダー、RS485/CAN、Φ69×33.9mm
MUWEIDU K7030 モーター 24V ブラシレスDC FOCサーボモーター、18ビットエンコーダー、RS485/CAN、Φ69×33.9mm
MUWEIDU
通常価格
$278.00 USD
通常価格
セール価格
$278.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
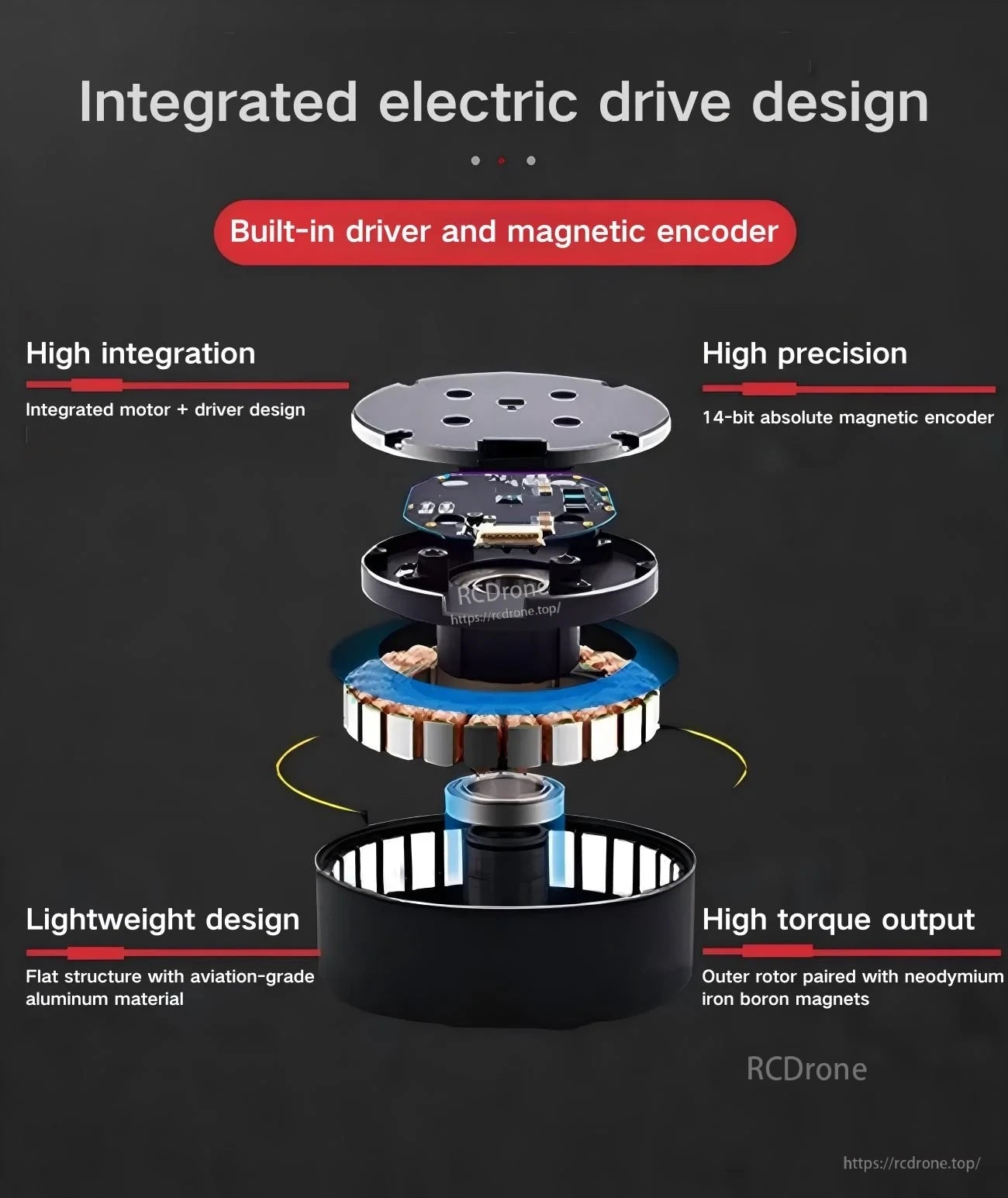
MUWEIDU K7030モーターは、高性能FOCサーボモーターとして設計されたKシリーズの中高速ブラシレスDC モーターで、統合された電動ドライブコンセプトを持っています。統合されたモーター + ドライバー設計と内蔵の磁気エンコーダを特徴としており、速度/位置制御およびPCベースのパラメータ調整、テスト、ファームウェアのアップグレードをサポートしています。
主な特徴
- 高性能FOCサーボモーター
- 統合型電動ドライブ設計:内蔵ドライバーと磁気エンコーダ
- 統合型、軽量、高精度、高トルク設計
- エンコーダ精度が14ビットから18ビットにアップグレード
- 最適化されたモーターコギングトルク
- PWM入力対応
- 高トルク出力:外部ローターとネオジウム鉄ボロン磁石の組み合わせ
- 軽量設計:航空機グレードのアルミニウム材料を使用したフラット構造
- PCベースのパラメータ調整/テスト/ファームウェアアップグレードが可能
- PC、MCU、PLC、産業用コンピュータ、Raspberry Piを含むオープンソース開発プラットフォームと互換性あり
- 複数の制御モード:トルクモード、スピードモード、マルチターン制御モード、シングルターン位置+方向モード、インクリメンタル位置モード
- マルチターン制御モード(速度制限付き);シングルターン位置 + 方向モード(速度制限付き);インクリメンタル位置モード(速度制限付き)
仕様
| モデル | K7030 (10/23/45T) |
| 定格電圧 | 24V |
| 定格電流 | 8.3A / 3.62A / 1.93A |
| ピークパワー | 330W / 75W / 24.5W |
| 定格トルク | 1 N.m / 1 N.m / 0.99 N.m |
| ピークトルク | 2 N.m / 3.8 N.m / 2.42 N.m |
| 定格速度 | 1500 rpm / 580 rpm / 220 rpm |
| エンコーダ | 18ビット |
| ローター慣性 | 933 gcm² |
| モーター温度監視 | はい |
| 制御モード | 速度 / 位置 |
| 通信プロトコル | RS485またはCAN |
| 全体寸法 | Φ69mm × 33.9mm |
| 重量 | 352g |
インターフェース定義 (CAN/RS485)
| インターフェース | 注意事項 |
|---|---|
| B/L | RS485-B または CAN-L |
| A/H | RS485-A または CAN-H |
| V- | 負電源 |
| V- | 負電源 |
| V+ | 正電源 |
| V+ | 正電源 |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
配線ガイダンス、統合ノート、または販売前の質問については、[email protected] orに連絡するか、https://rcdrone.top/. をご覧ください。
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
- 検査ロボット
- ハンドヘルドカメラ
- LiDAR
- ジンバルポッド
マニュアル
詳細

コンパクトな24V FOC サーボモーターは、ロボットおよびモーションコントロールプロジェクトにおける精密な速度と位置制御のために設計されています。
統合されたモーター、ドライバー、および磁気エンコーダーデザインは、配線を減らし、インストールを簡素化します。

明確なCAN/RS485インターフェースラベリングとオンボードIDスイッチは、マルチノードシステムの配線をサポートします。
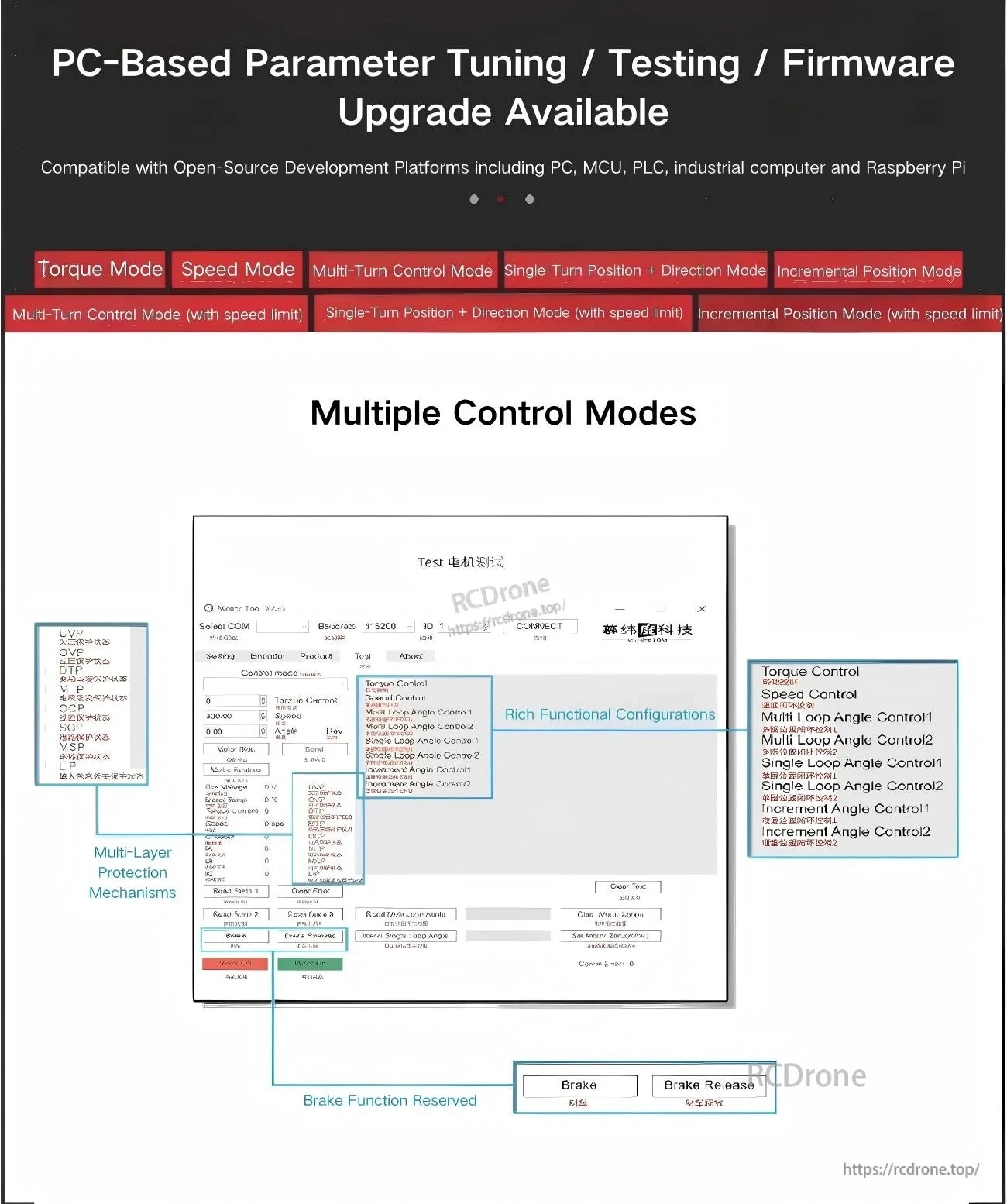
PCベースのツールは、トルク、速度、位置モード全体でのパラメータ調整、テスト、およびファームウェアの更新を可能にします。

Related Collections

