

MUWEIDU K9050 モーター FOCサーボモーター、24V 18ビットエンコーダー、RS485/CAN、速度/位置制御(16T/35T)
MUWEIDU K9050 モーター FOCサーボモーター、24V 18ビットエンコーダー、RS485/CAN、速度/位置制御(16T/35T)
MUWEIDU
通常価格
$439.00 USD
通常価格
セール価格
$439.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
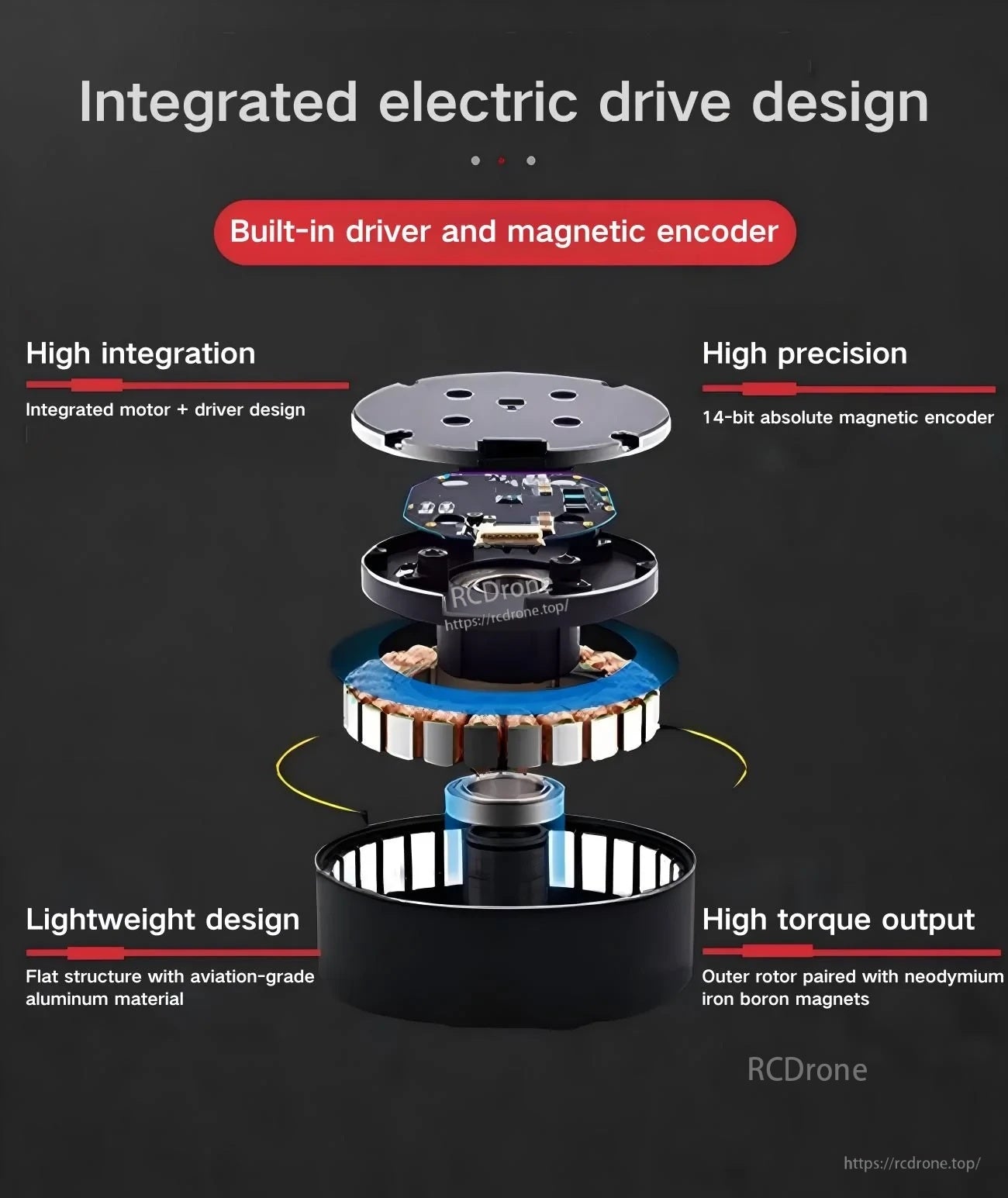
MUWEIDU K9050 モーター は、ブラシレスDCFOCサーボモーター で、統合ドライブ設計(内蔵ドライバー)と磁気エンコーダーを備えています。RS485またはCAN通信による速度/位置制御をサポートし、ロボティクスや自動化プロジェクトにおけるシステム統合のためのモーター温度監視機能を含んでいます。
主な特徴
- Kシリーズ中高速ブラシレスDCモーター; サーボモーター
- 高性能FOCサーボモーター
- 統合電動ドライブ設計:内蔵ドライバーと磁気エンコーダー(統合モーター + ドライバー)
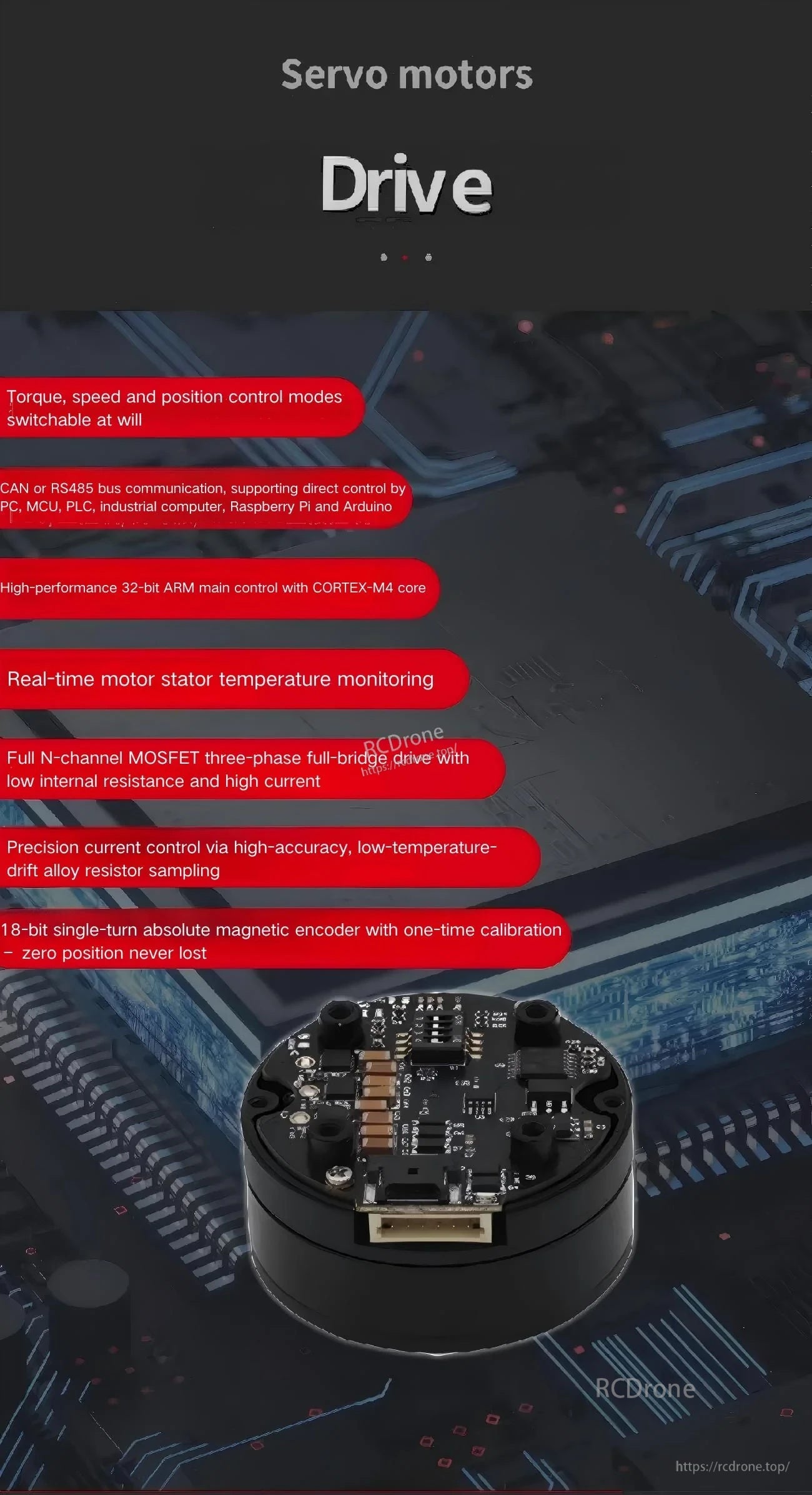
- エンコーダー精度のアップグレード:14ビットから18ビットへ; 18ビット単回転絶対磁気エンコーダー(ゼロ位置は失われない一度のキャリブレーション)
- 最適化されたモーターコギングトルク
- PWM入力対応
- トルク、速度、位置制御モードの切り替え可能
- CANまたはRS485バス通信; PC、MCU、PLC、産業用コンピュータ、Raspberry Pi、Arduinoを含むオープンソース開発プラットフォームと互換性あり
- 高性能32ビットARMメインコントロール(CORTEX-M4コア)
- リアルタイムモーター固定子温度監視
- 低内部抵抗と高電流を持つフルNチャネルMOSFET三相フルブリッジドライブ
- 高精度、低温ドリフト合金抵抗サンプリングによる精密電流制御
仕様
| モデル | K9050 (16T/35T) |
| 定格電圧 | 24V |
| 定格電流 | 7.45A / 3.46A |
| ピークパワー | 170W / 38W |
| 定格トルク | 2.42 N.m / 2.79 N.m |
| ピークトルク | 4.5 N.m / 5.8 N.m |
| 定格速度 | 490 rpm / 130 rpm |
| エンコーダ | 18ビット |
| ローター慣性 | 4656 gcm² |
| モーター温度監視 | はい |
| 制御モード | 速度/位置 |
| 通信プロトコル | RS485またはCAN |
| 全体寸法 | Φ89mm x 53mm |
| 重量 | 963 g |
インターフェース (CAN/RS485コネクタピンノート)
| B/L | RS485-BまたはCAN-L |
| A/H | RS485-AまたはCAN-H |
| V- | 負電源 |
| V+ | 正電源 |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
別名: IDスイッチおよびCAN/RS485 .
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
- 検査ロボット
- ハンドヘルドカメラ
- LiDAR
- ジンバルポッド
マニュアル / ドキュメント
互換性チェックや統合サポート(RS485/CAN配線、パラメータ調整、制御モード選択)のために、https://rcdrone.top/までサポートに連絡するか、メールで[email protected] .
詳細

ロボティクスと自動化のために設計されたコンパクトな24V FOC サーボモーターで、統合ドライブエレクトロニクスと絶対エンコーダフィードバックを備えています。
統合モーター + ドライバー構造により、配線が簡素化され、アクチュエーターパッケージが軽量化され、狭い設置スペースに適しています。
トルク、速度、位置制御を切り替え、内蔵の温度監視機能を使用して、CANまたはRS485経由で接続し、安全な統合を実現します。

CAN/RS485バス配線、電源入力、UARTライン、およびマルチノードセットアップをサポートするオンボードIDスイッチのための明確なピンラベリング。
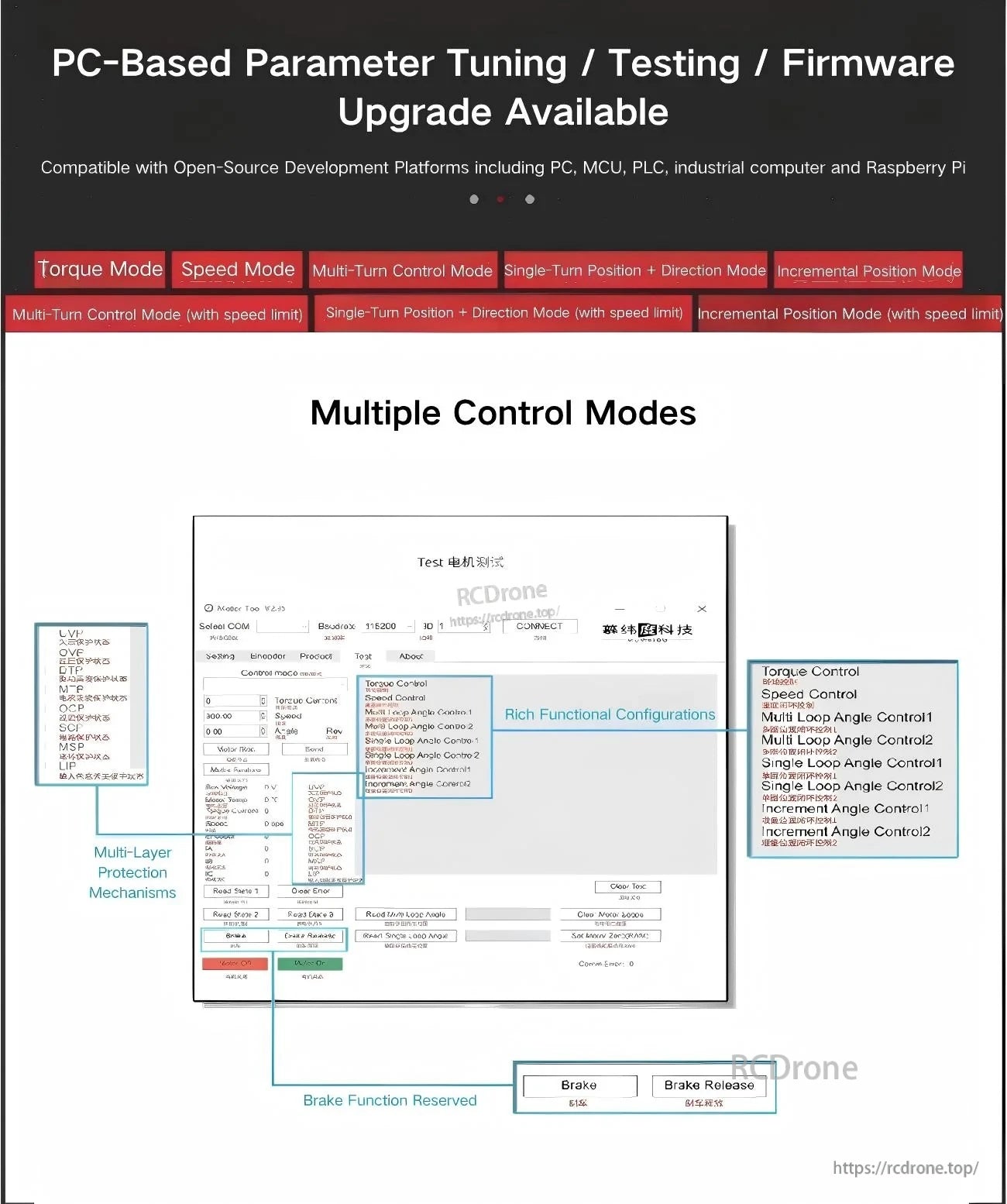
PCソフトウェアサポートにより、パラメータ調整、テスト、および複数の制御モードにわたるファームウェア更新を通じて、立ち上げを迅速化します。
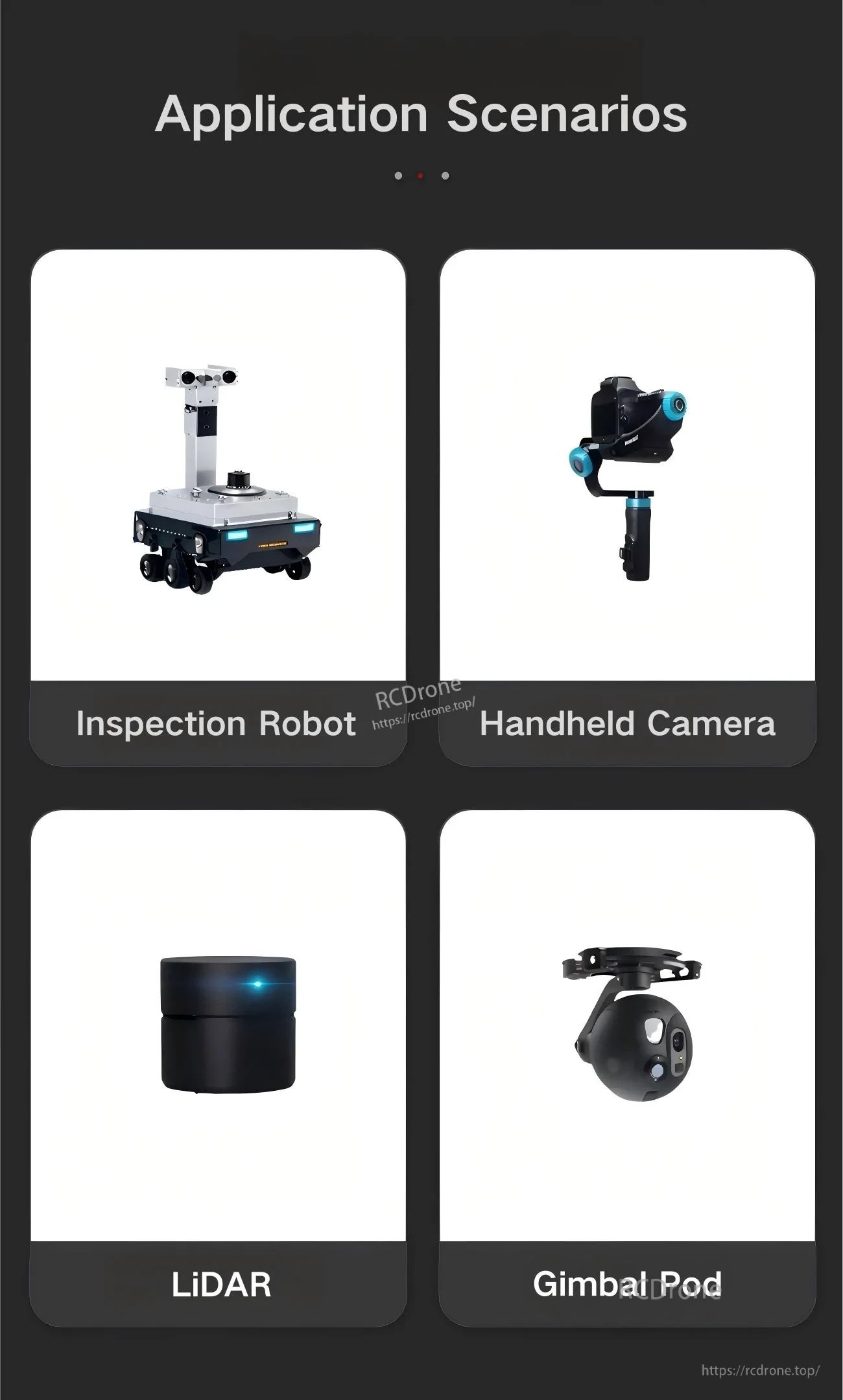
モバイル検査ロボットから安定化カメラおよびセンサープラットフォームまで、モーションコントロールプロジェクト向けに設計されています。
Related Collections

