

MUWEIDU L5028 モーター ミニサーボモーター 16V 150rpm 0.25N.m RS485/CAN 15ビット/18ビットエンコーダ
MUWEIDU L5028 モーター ミニサーボモーター 16V 150rpm 0.25N.m RS485/CAN 15ビット/18ビットエンコーダ
MUWEIDU
通常価格
$187.00 USD
通常価格
セール価格
$187.00 USD
単価
あたり
税込。
配送料はチェックアウト時に計算されます。
受取状況を読み込めませんでした
概要
MUWEIDU L5028モーターは、低速で高精度の動作制御を目的としたミニサーボモーター です。速度/位置制御をサポートし、フィードバック用のエンコーダーとして15ビットまたは18ビットの通信オプションを提供します。
主な特徴
- 低速の一連の& 高精度ブラシレスDCモーター(サーボモーター)
- 中空シャフト設計
- 安定した& スムーズな動作
- CE認証取得
- 統合された高精度
- 軽量構造、高トルク性能
- 低速および高精度位置制御の要件を満たす
- プレミアムシリコン鋼板と高温耐性の高性能永久磁石がモーターのコア材料として採用されています
- 外部ローターマルチステージフラットデザインは、より高いトルクを提供し、スペース制約のあるアプリケーションに最適です
- ブラシレス構造と高性能ベアリングの組み合わせにより、よりスムーズな回転と長寿命を実現
- 高精度、低温ドリフト合金抵抗器が正確な電流サンプリングと制御を実現
- フルNチャネル三相フルブリッジドライブは、低内部抵抗と高電流出力を特徴としています
- トルクオープンループ、速度および位置制御モード間のシームレスな切り替えをサポート
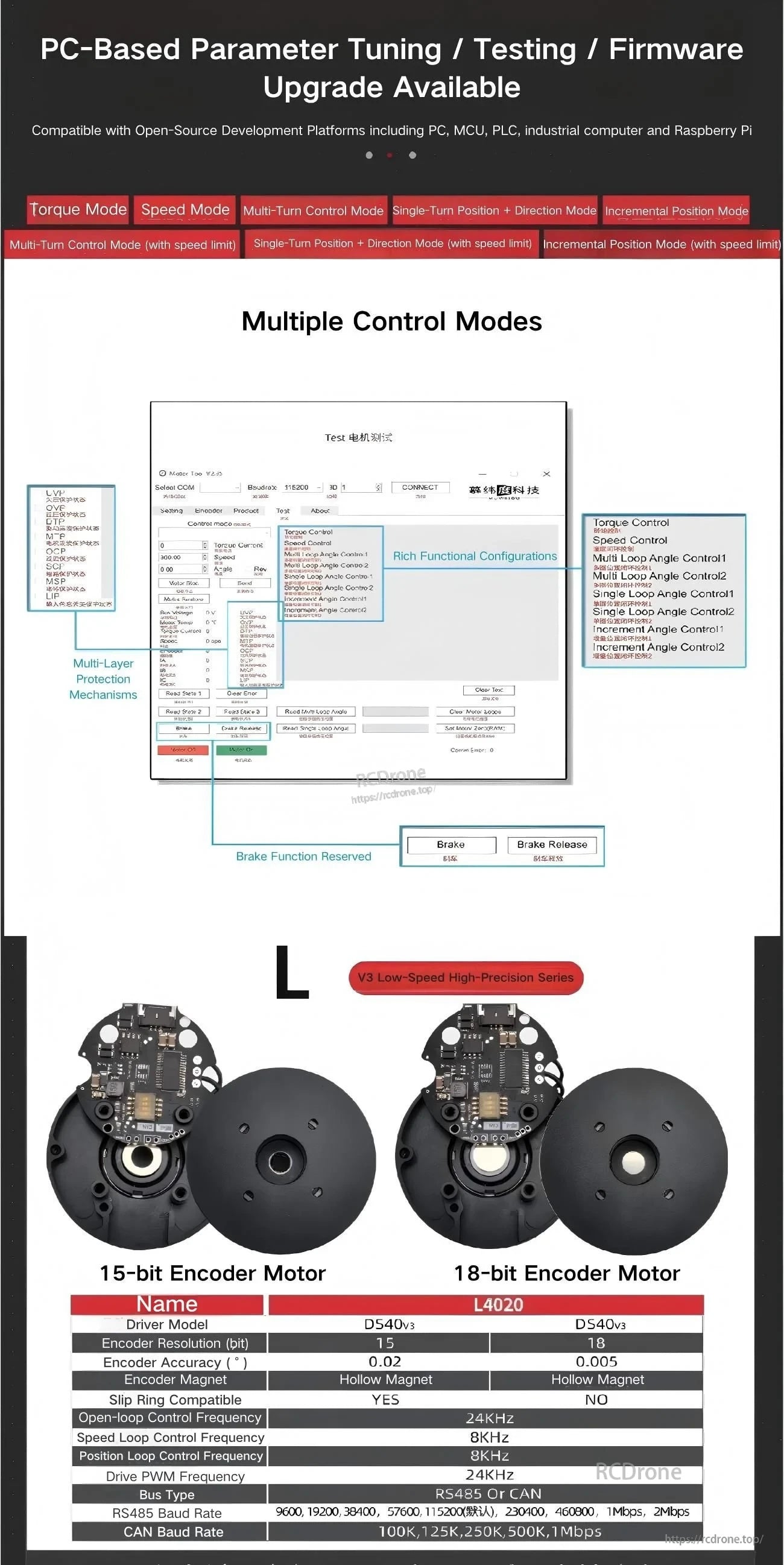
- PCベースのパラメータ調整/テスト/ファームウェアアップグレードが可能
- PC、MCU、PLC、産業用コンピュータ、Raspberry Piを含むオープンソース開発プラットフォームと互換性があります
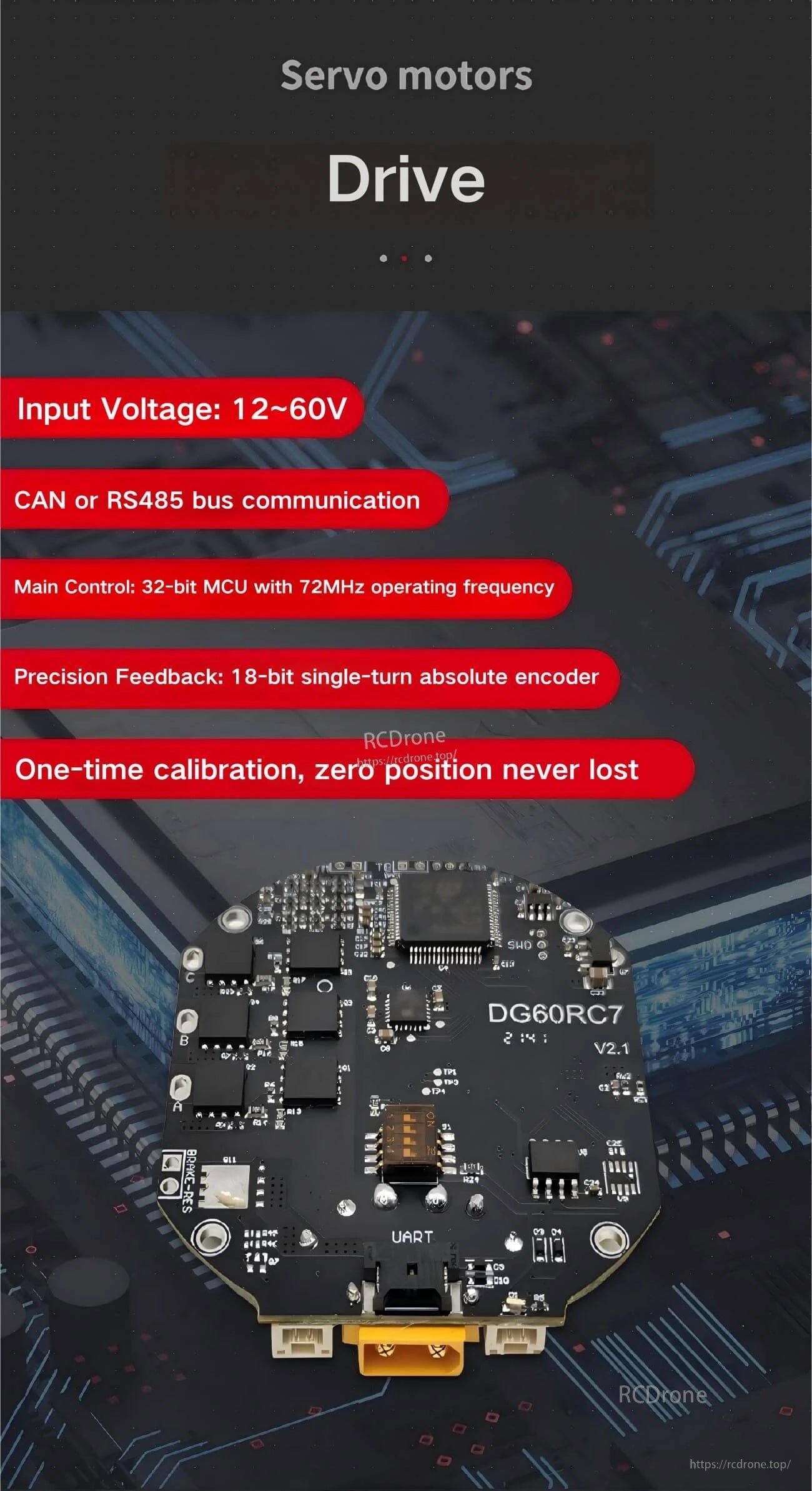
- 入力電圧: 12~60V
- CANまたはRS485バス通信
- メインコントロール: 72MHz動作周波数の32ビットMCU
- 精密フィードバック: 18ビット単回転絶対エンコーダ
- 一度のキャリブレーションで、ゼロ位置は失われません
- 複数の制御モード: トルクモード; 速度モード; マルチターン制御モード; 単回転位置 + 方向モード; 増分位置モード
- 制御モード(速度制限付き):マルチターン制御モード(速度制限付き);シングルターン位置 + 方向モード(速度制限付き);インクリメンタル位置モード(速度制限付き)
仕様
| モデル | L5028 |
| 定格電圧 | 16V |
| 定格電流 | 0.82A |
| ピークパワー | 4.7W |
| 定格トルク | 0.25 N.m |
| ピークトルク | 0.37 N.m |
| 定格速度 | 150 rpm |
| エンコーダ | 15ビットまたは18ビット |
| ローター慣性 | 192 gcm^2 |
| モーター温度監視 | はい |
| 制御モード | 速度/位置 |
| 通信プロトコル | RS485またはCAN |
| 全体寸法 | Φ49 mm x 28.9 mm |
| 重量 | 135 g |
インターフェース定義 (CAN/RS485)
| インターフェース | 注意 |
|---|---|
| B/L | RS485-B または CAN-L |
| A/H | RS485-A または CAN-H |
| V- | 負電源 |
| V- | 負電源 |
| V+ | 正電源 |
| V+ | 正電源 |
| T | UART送信機 |
| R | UART受信機 |
| G | 信号GND |
アプリケーション
- ヒューマノイドロボット
- ロボットアーム
- エクソスケルトン
- 四足歩行ロボット
- AGV車両
- ARUロボット
- 360°カメラ
- ハンドヘルドカメラ
- LiDAR
- ジンバル
事前販売の選択支援、配線確認、または文書サポートについては、[email protected] orに連絡するか、https://rcdrone.top/. をご覧ください。
マニュアル / ドキュメント
詳細

MUWEIDU L5028は、スペースが限られたビルド用のハロウシャフト形式のコンパクトで低速のミニサーボモーターです。

統合ドライブエレクトロニクスは、広範な入力範囲と精密なモーションコントロールのためのCANまたはRS485通信をサポートします。

明確なインターフェースラベリングは、統合中のCAN/RS485信号、電源接続、およびUARTピンの配線に役立ちます。
PCベースのパラメータ調整と複数の制御モードにより、15ビットまたは18ビットのエンコーダフィードバックをタスクに合わせるのが簡単です。
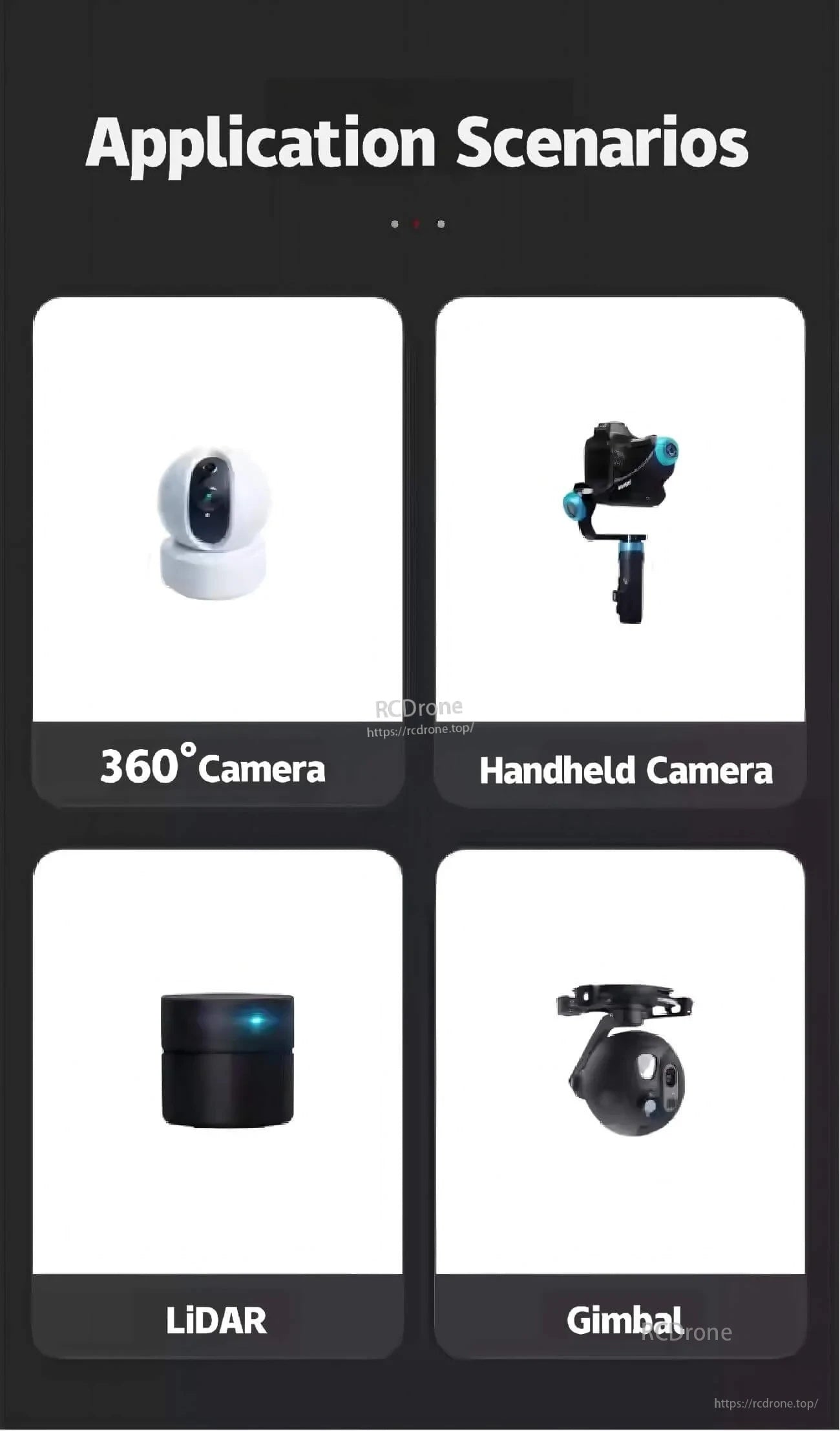
カメラシステム、LiDARアセンブリ、ジンバルなどのコンパクトなロボティクスおよび安定化プロジェクトに適しています。
Related Collections

