







MyActuator L-9025 直動型BLDCサーボモーター 24V 2.79N·m 280RPM ロボット・自動化用高精度
MyActuator L-9025 直動型BLDCサーボモーター 24V 2.79N·m 280RPM ロボット・自動化用高精度
MyActuator
受取状況を読み込めませんでした
概要
MyActuator L-9025 ダイレクトドライブ BLDC サーボモーターは、高度なロボティクス、自動化、ジンバルアプリケーション向けに、精密な制御と高トルクを提供します。定格トルク 2.79 N·m、最大瞬時トルク 5.8 N·m、および高い制御精度 0.001°を備え、このモーターは卓越した精度と性能を保証します。コンパクトな 880 g のデザインと、CAN BUS および RS485 通信のサポートにより、要求の厳しい産業および研究環境に最適です。
主な特徴
-
高トルク性能: 定格トルク 2.79 N·m および瞬時トルク 5.8 N·m により、重負荷アプリケーションに対応します。
-
広範な速度範囲: 定格速度 130 RPM および最大速度 280 RPM。
-
精密制御: 位置精度は最大 0.001° 高精度タスク用。
-
多用途通信: CAN BUSおよびRS485プロトコルをサポートし、ボーレートは500kから2.5Mまで対応。
-
堅牢な構造: -20°Cから55°Cの温度で動作し、120°Cまでの脱磁に耐性あり。
-
最適化された統合: トルク、速度、位置ループのためにMC200ドライバーとのシームレスなペアリング。
仕様
| アイテム | L-9025 |
|---|---|
| 定格電圧 | 24 V |
| 定格電流 | 3.46 A |
| 定格トルク | 2.79 N·m |
| 定格速度 | 130 RPM |
| 最大速度 | 280 RPM |
| 最大瞬時トルク | 5.8 N·m |
| 最大瞬時電流 | 7.6 A |
| ライン抵抗 | 1.9 Ω |
| 相間インダクタンス | 4.71 mH |
| 速度定数 | 12 RPM/V |
| トルク定数 | 0.76 N·m/A |
| ローター慣性 | 4656 g·cm² |
| 極対数 | 14 |
| モーター重量 | 880 g |
| 動作温度 | -20°C ~ 55°C |
| 最大脱磁温度 | 120°C |
| 制御精度 | 0.001° |
マッチドドライバー: MC200
| パラメータ | 値 |
|---|---|
| 入力電圧 | 12~24 V |
| 電流 | 通常: 8 A / 瞬間: 15 A |
| 定格出力 | 200 W |
| エンコーダ | 14ビット磁気エンコーダ |
| 通信 | CAN BUS: 1M; RS485: 115200/500k/1M/2.5M |
| 制御モード | トルクループ、スピードループ、ポジションループ |
| Sカーブサポート | はい |
アプリケーション
-
ロボットアームおよび自動化システム
-
ジンバル安定化プラットフォーム
-
精密位置決め装置
-
産業用自動化機器
-
研究開発用ラボ
詳細

MyActuator L9025 BLDCサーボ: 24V, 3.46A, 2.79N.mトルク, 130RPM, 14極ペア。CAN/RS485、14ビットエンコーダ、MC200ドライバをサポート。最大280RPM、880g、動作温度-20から55°C。

RMD-L-90サーボモーター:高精度のための統合設計による精密制御。高孔密度のフラット構造、絶対値エンコーダ、GYEMSサーボモータードライブ。エンコーダは16ビットで最大0.005度の精度を提供します。多スロットフラットステーター設計の位置センサー、高温耐性、低内部抵抗、エナメル線を特徴としています。高性能ベアリング、耐久性のある構造、トルクを増加させるための永久磁石アーク設計が含まれています。
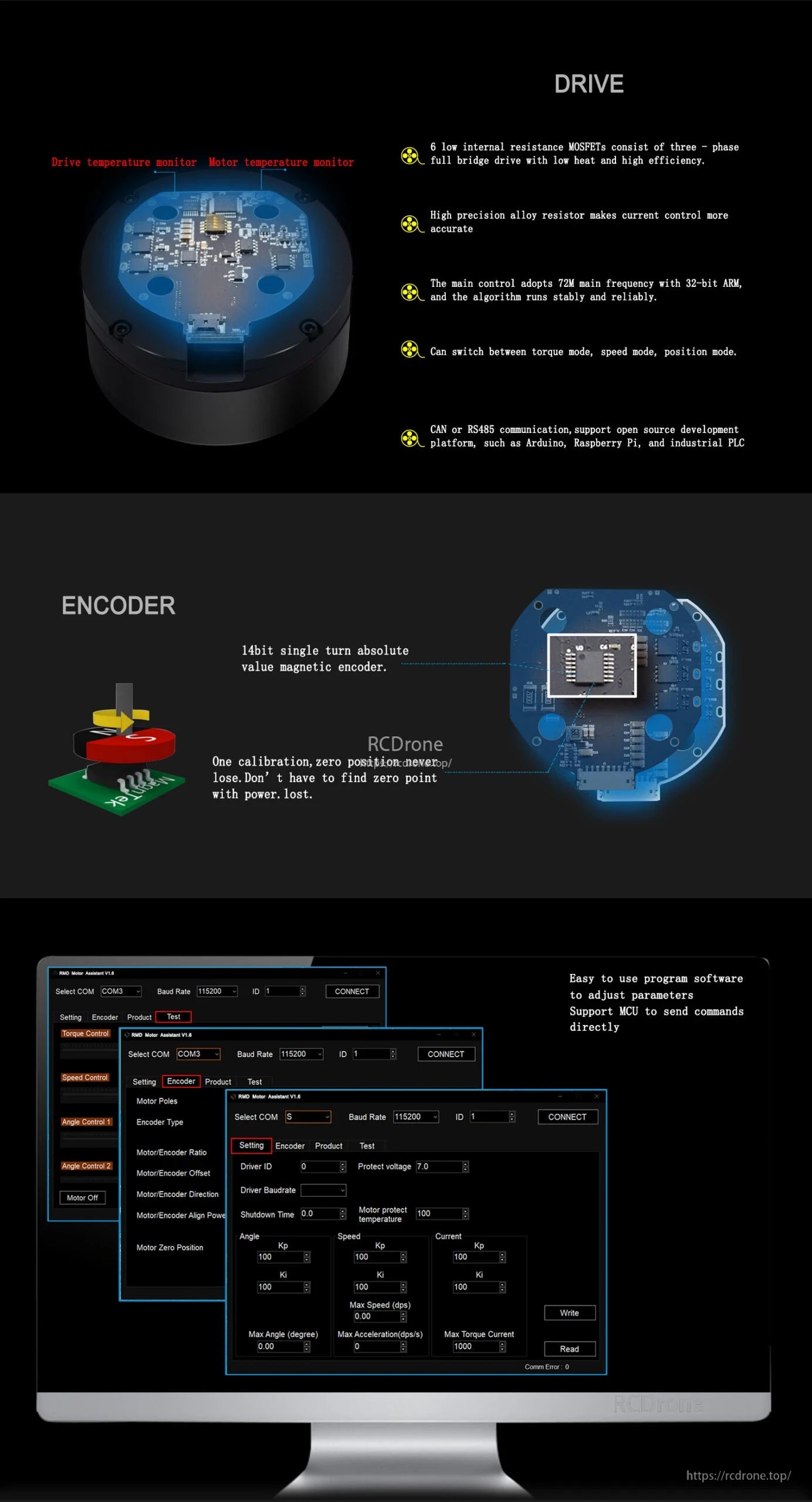
DRIVE 6システムは、内部抵抗MOSFET、温度およびモーター監視機能を備えた三相ドライブを特徴としており、高効率と精度を実現します。メインコントロールは72MHzのクロックを使用し、32ビットの算術演算を行い、安定して動作します。トルク、速度、位置モードの切り替えをCANまたはRS485通信を介してサポートしています。システムには、単回転解像度を持ち、ゼロ位置キャリブレーションの損失がない絶対値磁気エンコーダが含まれています。RMDソフトウェアは、パラメータの設定、コマンドの送信、およびモーターのテストを可能にします。
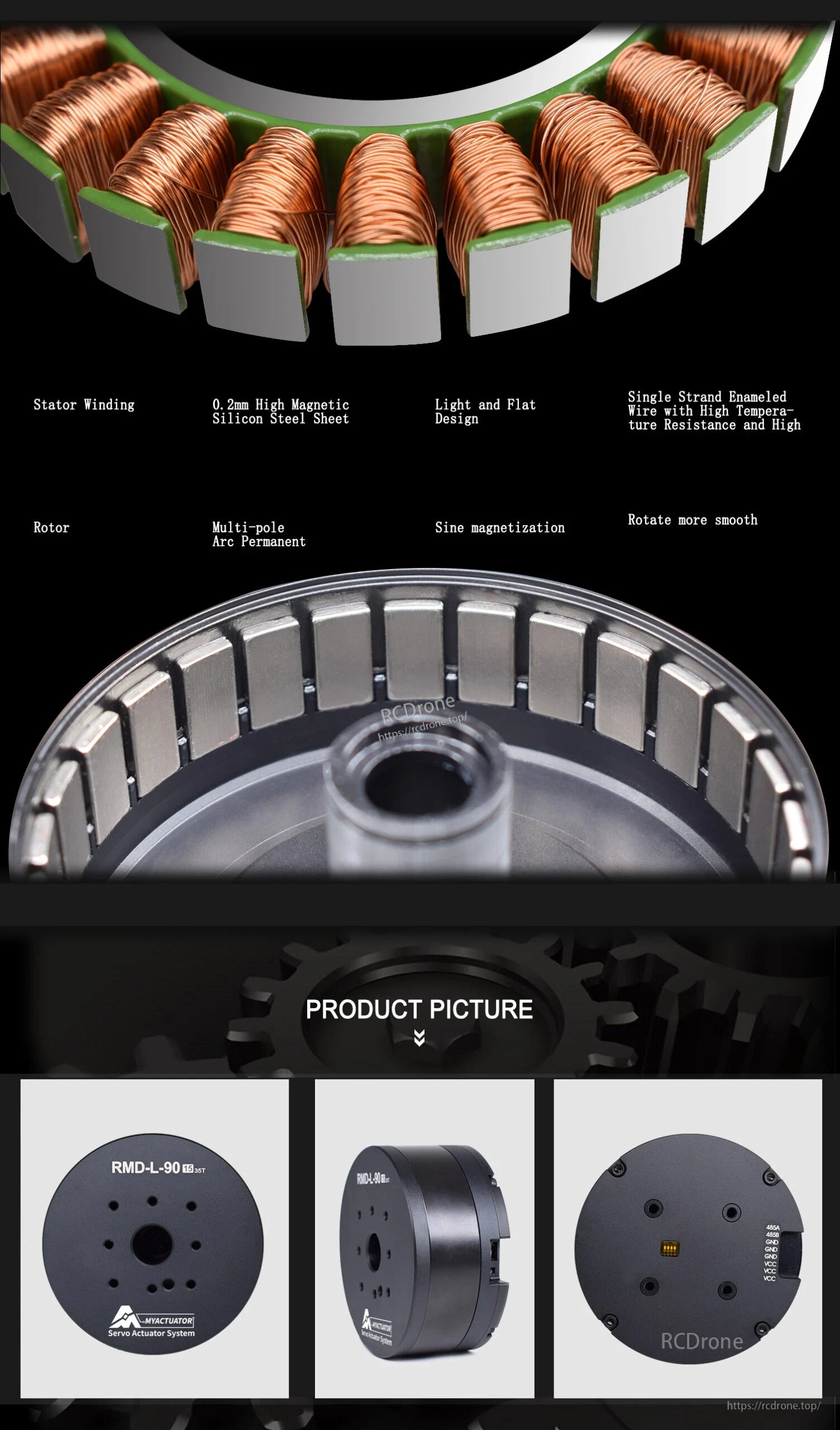
高温耐性とスムーズな回転のために設計されたステータ巻線。高い磁気透過率を持つ単線エナメルシリコン鋼板とフラットデザインを特徴としています。
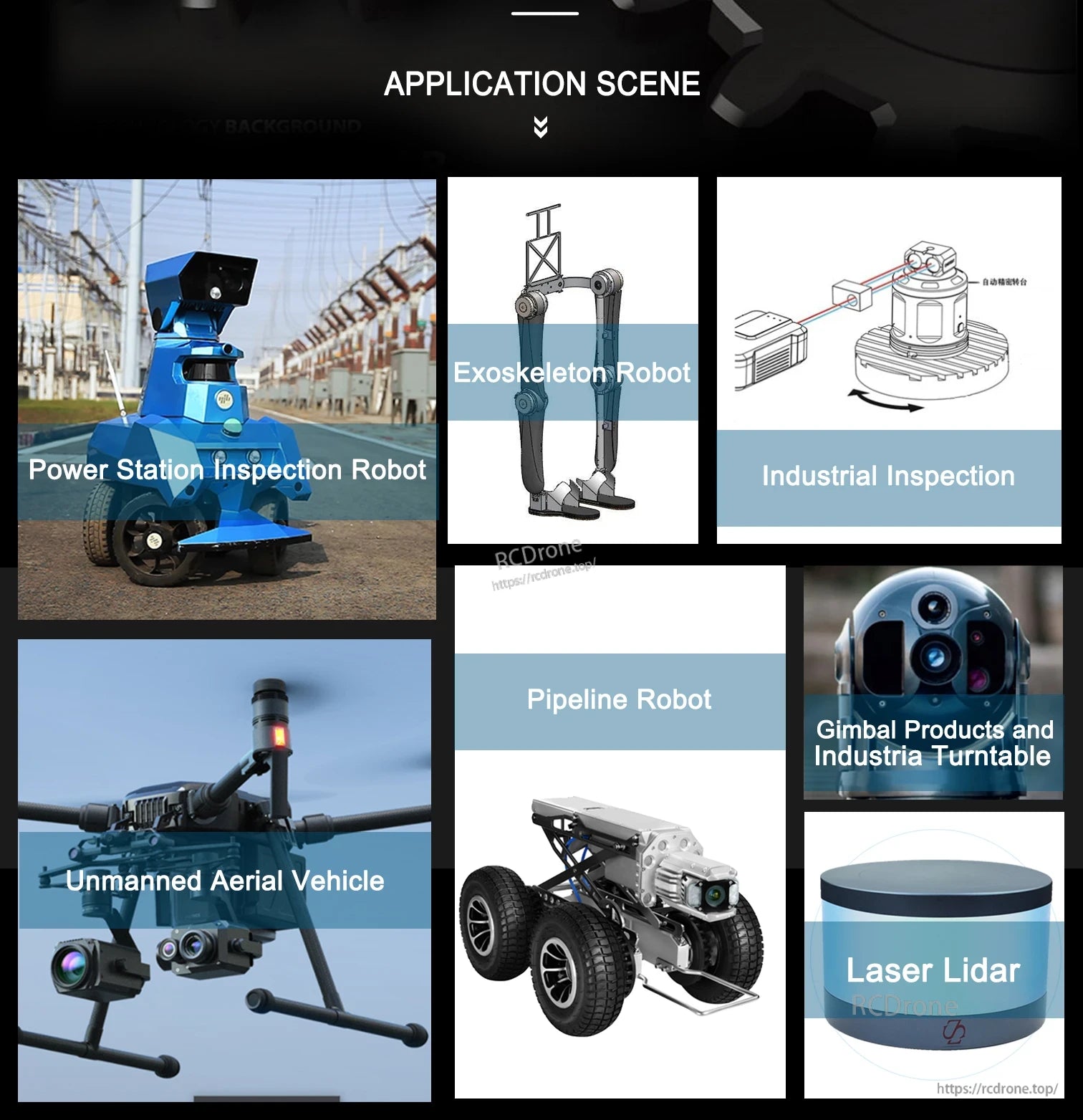
Omhrntは、パイプラインおよび空中アプリケーション向けの外骨格、電源ステーション、ジンバル製品を備えた産業用検査ロボットのラインを提供しています。
Related Collections







