




MyActuator RMD-X12-320 サーボアクチュエータ、高トルク一体型モーター(EtherCAT & CAN BUS対応)、USB-CANアダプタ、120Ω抵抗
MyActuator RMD-X12-320 サーボアクチュエータ、高トルク一体型モーター(EtherCAT & CAN BUS対応)、USB-CANアダプタ、120Ω抵抗
MyActuator
受取状況を読み込めませんでした
概要
MyActuator RMD-X12-320は、産業用ロボット、協働ロボット、高精度自動化システム向けに設計された高性能サーボアクチュエーターです。高トルクモーター、遊星ギアボックス、先進的なドライバーエレクトロニクスをコンパクトな形状に統合し、シームレスなモーションコントロールと信頼性の高いEtherCATまたはCAN BUS通信を実現します。
最適化された設計と豊富なインターフェースオプションを備えたRMD-X12-320は、要求の厳しいロボットアプリケーションに対して卓越した効率、精密な制御、柔軟性を提供します。
主な特徴
-
統合設計: モーター、ドライバー、減速機が1つのコンパクトモジュールに統合されています。
-
高トルク出力: 重負荷ロボットジョイントや自動化システムに最適です。
-
複数の通信プロトコル: EtherCAT と CAN BUS の両方をサポートしています。
-
精密なフィードバック: スムーズな動作と位置決めのための高解像度エンコーダー。
-
プラグアンドプレイ配線: クイックセットアップのための明確にラベル付けされたケーブルと付属のアダプター。
-
広い互換性: 工業用ロボット、協働ロボット、AGV、および自動化アームに適しています。
インターフェースの説明
| ポート | 定義 | 説明 |
|---|---|---|
| 1. EtherCAT_OUT | EtherCAT出力 | 他のモジュールへの通信出力。 |
| 2. EtherCAT_IN | EtherCAT入力 | マスターコントローラーからの通信入力。 |
| 3. VCC | 正の電源 | メインの正のDC入力。 |
| 4. CAN_L | CANバスローレベル | CAN通信のためのCANローレベル信号。 |
| 5. CAN_H | CANバスハイレベル | CAN通信のためのCANハイレベル信号。 |
| 6. GND | グラウンド | 負の電源端子。 |
| 7. T- / 8. T+ | フィードバックライン | モジュールの状態をマスターステーションにフィードバック。 |
| 9. R- / 10. R+ | コマンドライン | マスターステーションからアクチュエーターへの制御信号。 |
付属アクセサリー
| ラベル | アイテム | 説明 |
|---|---|---|
| A | 電源 + CAN BUSケーブル ×2 | 白(CAN_L)、黄(CAN_H)、赤(VCC)、黒(GND)ラインを備えたXT90電源コネクタが含まれています。 |
| B | 120Ω端子抵抗 ×1 | CAN BUSの終端用。 |
| C | EtherCAT通信ケーブル ×2 | EtherCAT信号の送受信用SH1.0mm 4ピンコネクタ。 |
| D | CAN BUS通信モジュール ×1 | 診断と統合のためのUSB-to-CANアダプタ。スイッチ可能な120Ω終端が含まれています。 |
パッケージ情報
-
箱の寸法: 280 mm (長さ) × 230 mm (幅) × 130 mm (高さ)
-
内容物:
-
X12-320 サーボアクチュエーター ×1
-
電源 + CAN BUS 通信ケーブル ×2
-
120Ω ターミナル抵抗 ×1
-
EtherCAT 通信ケーブル ×2
-
CAN BUS 通信モジュール ×1 (USB-CANアダプター)
-
用途
-
産業用ロボットおよび協働ロボット
-
AGV(自動誘導車)およびAMR(自律移動ロボット)
-
自動化および精密組立用のロボットアーム
信頼性の高いモーションコントロールを必要とする研究開発プラットフォーム
詳細
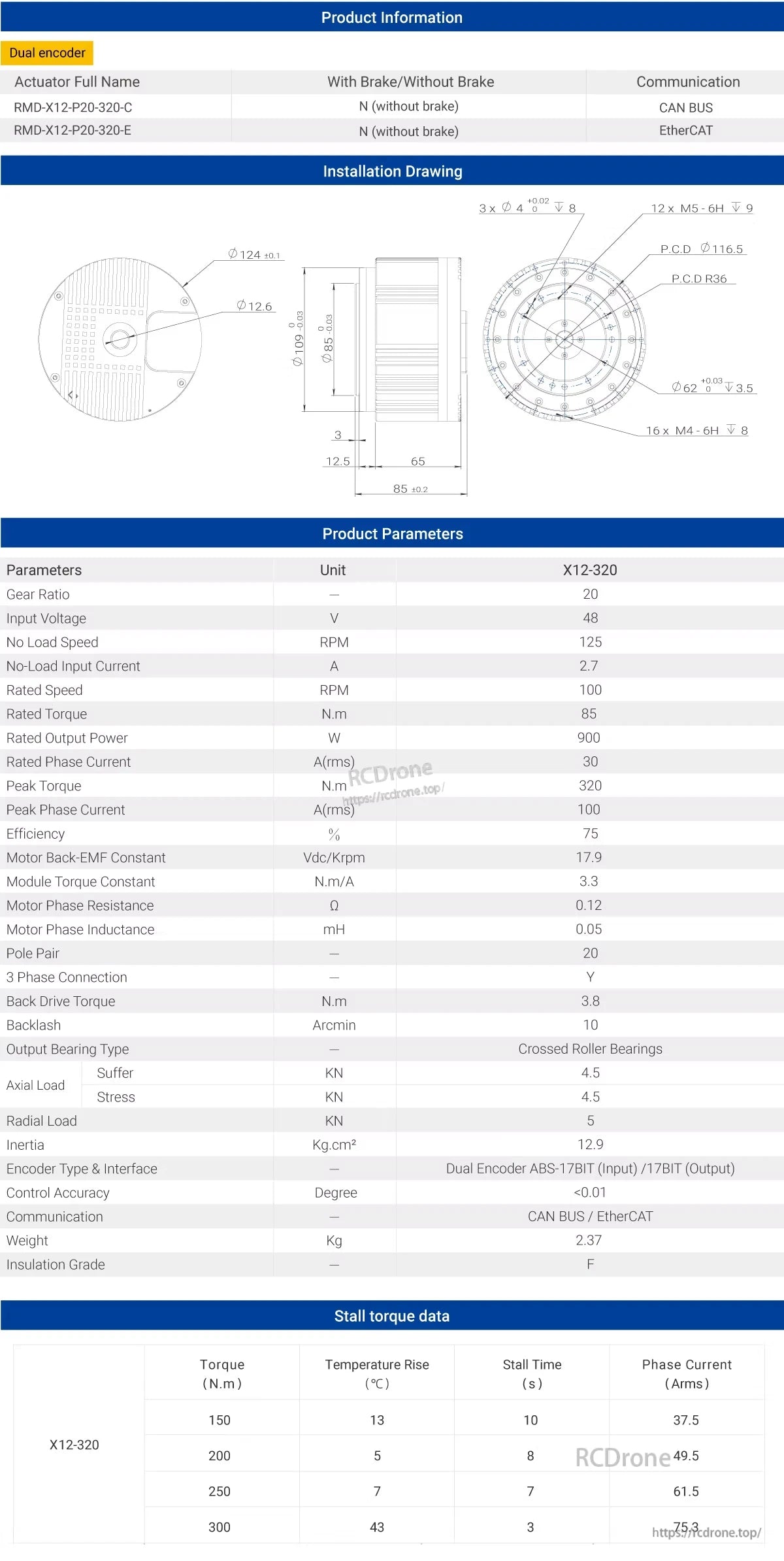
MyActuator RMD-X12-P20-320 サーボアクチュエーター、デュアルエンコーダー、20ギア比、48V入力、900W出力、85Nm定格トルク、CAN BUS/EtherCAT通信、2。37kgの重量、クロスローラーベアリング、12.9kg.cm²の慣性。

サーボインターフェースX12-320は、EtherCAT、CANバス、および電源接続をサポートしています。パッケージサイズ:280×230×130mm。電源、ケーブル、抵抗器、無料のUSB-CANアダプターが含まれています。

X12-320のアクセサリーには、電源、CAN BUS、EtherCATケーブル、およびモジュールの詳細が含まれています。色分けされたワイヤー、コネクタ、および端子により、適切な取り付けが保証されます。ご注文ごとに無料のUSB-CANアダプターが含まれています。

RMD X12 320サーボ:100μsの応答、デュアルエンコーダー、EtherCAT/CAN、320N.mのトルク、Ø124mm×85mm、ロボティクスおよび自動化用。

RMD-X12-P20-320-C サーボモーター:48V入力、20:1ギア比、900Wのピーク電力、デュアル17ビットエンコーダー、CAN BUS/EtherCAT、2.37kg、詳細な寸法付き。

パワー、CAN BUS、EtherCATケーブル、1200Ωターミネーター抵抗を備えたX12-320Lサーボモーター。

MYACTUATORサーボのパッケージ表示、CAN BUSケーブルと120Ω抵抗を含む。
Related Collections




