






MyActuator RMD-X4-10 プラネタリーアクチュエータ 10N·m デュアルエンコーダ EtherCAT+CAN ロボット関節ドライブ
MyActuator RMD-X4-10 プラネタリーアクチュエータ 10N·m デュアルエンコーダ EtherCAT+CAN ロボット関節ドライブ
MyActuator
受取状況を読み込めませんでした
概要
MyActuator RMD-X4-10プラネタリーアクチュエーターは、高度なロボットアプリケーション向けに設計された高性能DCモータージョイントモジュールです。12.6:1のプラネタリーギア比、10N·mのピークトルク、および100Wの定格出力を備え、デュアルエンコーダシステム(17ビット入力 / 18ビット出力)を統合し、0.01°の精密制御を実現します。その大きな中空構造は、マルチセンサー統合をサポートし、ヒューマノイドロボットの全身姿勢制御のための中央ハブを可能にします。EtherCATおよびCANのデュアルプロトコル通信により、アクチュエーターは250μsの超高速応答を達成し、ヒューマノイドロボット、バイオニックレッグドライブ、産業オートメーションなどの高ダイナミックで高信頼性のシナリオに最適です。
主な特徴
-
高精度デュアルエンコーダ: 17ビット入力 / 18ビット出力で0。01° 精度
-
ピークトルク 10N·m 12.6:1の遊星ギア比
-
クロスローラーベアリング: 安定したロボットジョイントのための優れた抗曲げモーメント能力
-
EtherCAT + CANバスデュアルコミュニケーション: マルチマシン連携をサポートし、超高速250μs応答
-
大口径ハローストラクチャー: 複雑なロボットシステムのためのセンサー、ケーブル、スリップリングの統合を可能にします
-
高信頼性: ヒューマノイドの歩行制御のために設計されており、走行、ジャンプ、複雑な動作のスムーズな移行を実現します
-
コンパクト&軽量: Φ55mm × 55.5mm、重量 0。33kg
仕様
| パラメータ | 値 |
|---|---|
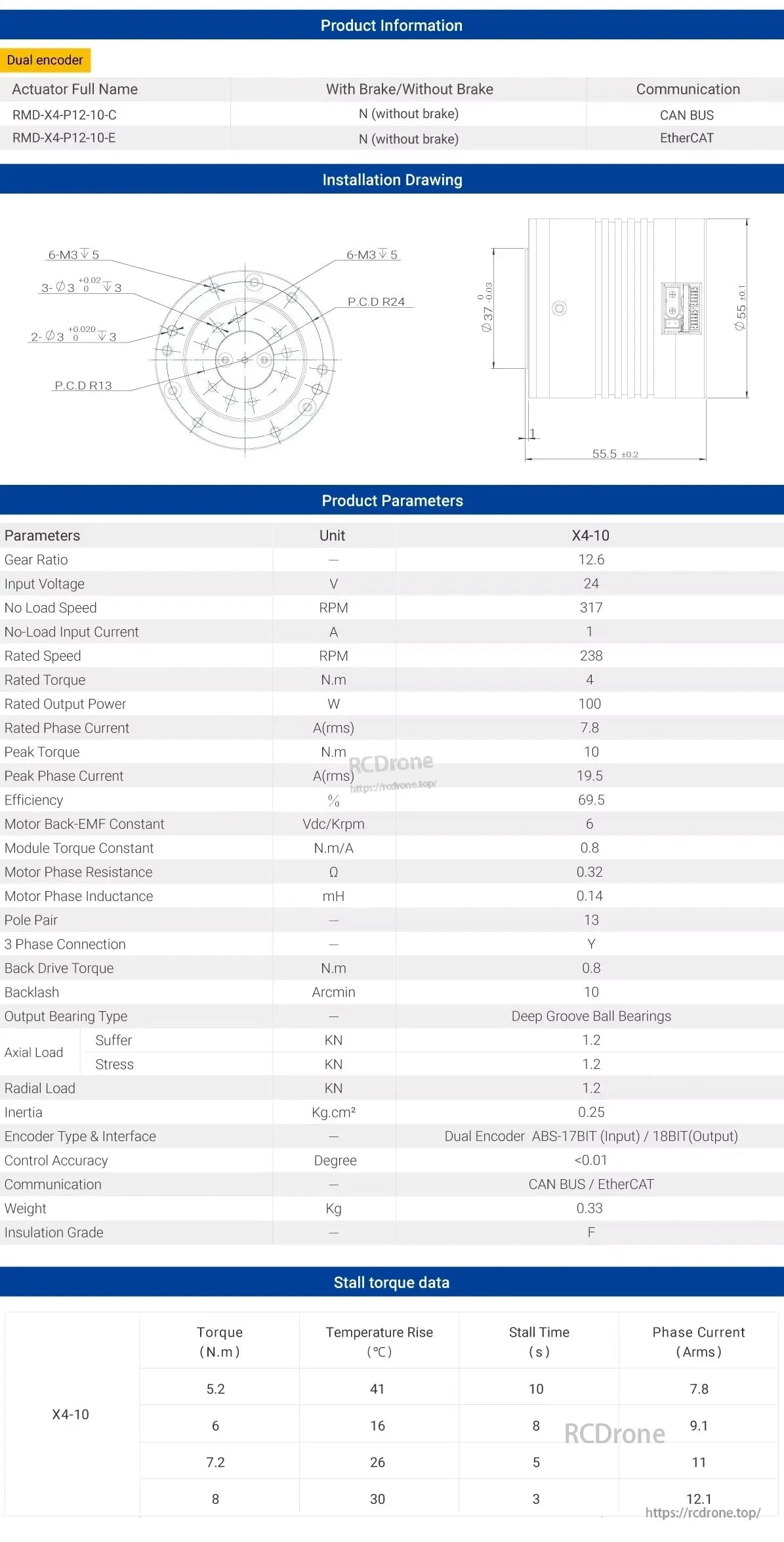
| モデル | RMD-X4-10 |
| ギア比 | 12.6:1 |
| 入力電圧 | 24V DC |
| 定格速度 | 238 RPM |
| 無負荷速度 | 317 RPM |
| 定格出力電力 | 100W |
| 定格トルク | 4N·m |
| ピークトルク | 10N·m |
| 定格電流 | 7.84A |
| 無負荷電流 | 1A |
| エンコーダタイプ | デュアルエンコーダ (ABS-17ビット / 18ビット) |
| 通信 | EtherCAT + CANバス |
| 重量 | 0.33kg |
| サイズ | Ø55mm × 55.5mm |
アプリケーション
-
ヒューマノイドロボット – 腕、脚、胴体用のジョイントドライブ
-
バイオニックレッグドライブ – ランニングとジャンプの動作に適した高トルク・抗曲げ設計
-
協働ロボット – 工業自動化のためのスムーズな動作制御
-
エクソスケルトン – 人間支援デバイス用の軽量・高ダイナミックアクチュエーター
-
フレキシブル生産ライン – EtherCAT高速通信による多軸同期
パッケージおよびアクセサリー
-
電源 + CANバス通信ケーブル ×1
-
120Ω端子抵抗 ×1
EtherCAT通信ケーブル ×2
-
CANバス通信モジュール ×1(USB-CANアダプターはご注文ごとに含まれます)
パッケージ寸法: 100mm × 100mm × 70mm
詳細

RMD-X4-PT2.5-10-Cデュアルエンコーダーロボットジョイントドライブ、24V入力、12.6ギア比、4N·mトルク、100W出力を備えています。CAN BUS/EtherCATインターフェース、317RPMの無負荷速度、0.28kgの重量を特徴としています。取り付け寸法と技術仕様が含まれています。

10N.mのピークトルク、12.6:1のギア比、0.33kgの重量を持つ惑星アクチュエーター。サイズ:Ø55mm×55.5mm。EtherCAT/CANBUS通信、デュアルエンコーダ、高速MCU、CANチップ、深溝玉軸受を特徴としています。

デュアルエンコーダABS-17BIT入力 / 18BIT出力、X4-10、SN:40225621、MYACTUATOR

MYACTUATORのRMD-X4-10惑星アクチュエーターは、100Wの電力、46Nmのトルク、デュアルエンコーダ、238rpmの速度を提供します。電源 + CAN BUSケーブル、120Ω抵抗器、EtherCATケーブル、CAN BUSモジュール、無料のUSB-CANアダプターが付属しています。
RMD-X4-10 ロボティック惑星アクチュエーターは、デュアルエンコーダ、12.6ギア比、24V入力、100W出力、CAN BUS/EtherCAT。4N.mのトルク、238 RPMの速度を提供し、重量は0.33kgで、高効率のために深溝玉軸受を使用しています。

X4-10インターフェースには、電源、CAN、およびEtherCATポートが含まれています。パッケージには、電源、ケーブル、抵抗器、およびモジュールが含まれています。寸法:100x100x70mm。各注文にはUSB-CANアダプタが含まれています。

X4-10アクセサリーには、電源、CAN BUSおよびEtherCATケーブル、端子抵抗、およびCAN BUSモジュールが含まれています。詳細には、コネクタ、ワイヤ機能、信号線、およびUSB-CANアダプタの注意事項が含まれています。
Related Collections






