





MyActuator RMD-X4-36 34N·m プラネタリーアクチュエータ DCブラシレスモーター デュアルエンコーダ搭載、EtherCAT&CANバス対応、36:1減速比
MyActuator RMD-X4-36 34N·m プラネタリーアクチュエータ DCブラシレスモーター デュアルエンコーダ搭載、EtherCAT&CANバス対応、36:1減速比
MyActuator
受取状況を読み込めませんでした
概要
MyActuator RMD-X4-36 プラネタリーアクチュエーター DCブラシレスモーターは、精密な動作制御、高トルク出力、コンパクトな統合を必要とするロボティクスおよび自動化システム向けに設計された高性能ジョイントアクチュエーターです。34N·mのピークトルク、36:1のギア比、および交差ローラーベアリング構造を備え、優れた耐曲げ能力と耐久性を提供します。EtherCAT + CANデュアル通信プロトコルと250μsの超高速応答を特徴とし、このアクチュエーターはヒューマノイドロボット、ロボットアーム、モバイルプラットフォーム、その他の高度なロボティクスアプリケーションに最適です。デュアルエンコーダ設計(ABS 17ビット入力 / 18ビット出力)により、超高精度な位置決めが保証され、コンパクトなサイズ(55mm × 61mm、0.36kg)により、軽量で効率的な統合が可能です。
主な特徴
-
高精度デュアルエンコーダ: 17ビット(入力)+ 18ビット(出力)で0.01°の精度を実現。
-
EtherCAT + CANバスプロトコル: 250μsの超高速応答で柔軟な通信を実現。
-
クロスローラーベアリング: 優れた抗曲げ性能と長寿命。
-
高出力密度: コンパクトな直径55mm、長さ61mm、重さわずか0.36kg。
-
ピークトルク34N·mおよび定格トルク11.5N·mが安定した強力な動作出力を保証。
-
高効率: 100Wの定格出力とスムーズなFOC(フィールド指向制御)技術。
-
多用途アプリケーション: ヒューマノイドロボット、エクソスケルトン、マニピュレーター、自動化システム向けに設計。
仕様
| パラメータ | 値 |
|---|---|
| モデル | RMD-X4-P36-36-C |
| 入力電圧 | 24V |
| ギア比 | 36:1 |
| 無負荷回転数 | 111 RPM |
| 無負荷電流 | 0.9 A |
| 定格回転数 | 83 RPM |
| 定格トルク | 11.5 N·m |
| 定格出力電力 | 100 W |
| ピークトルク | 34 N·m |
| ピーク相電流 | 21.5 A (rms) |
| ポールペア | 13 |
| エンコーダタイプ | デュアルエンコーダ ABS 17ビット (入力) / 18ビット (出力) |
| 通信プロトコル | EtherCAT / CANバス |
| サイズ | Ø55mm × 61mm |
| 重量 | 0.36 kg |
パッケージ内容
-
1 × RMD-X4-36 プラネタリーアクチュエータモーター
-
1 × 電源 + CANバス通信ケーブル
-
1 × 120Ω端子抵抗
-
2 × EtherCAT通信ケーブル
-
1 × CANバス通信モジュール (USB-CANアダプタ)
アプリケーション
-
ヒューマノイドおよびバイオニックロボット
-
協働ロボットアーム
-
外骨格およびリハビリテーションロボット
-
サービスロボットおよびモバイルプラットフォーム
-
コンパクトで高トルクのアクチュエータを必要とする精密自動化システム
詳細

34N.mのピークトルク、36:1のギア比を持つ惑星アクチュエーター、0。36kgの重量、Ø55mm×61mmのサイズ。EtherCAT/CANBUS通信、デュアルエンコーダ、高速MCU、CANチップ、交差ローラーベアリングを特徴としています。

RMD-X4-P36-36モーター:24V、10.5N.mトルク、83RPM、デュアルエンコーダ、EtherCAT+CAN BUS、36ギア比、0.36kg、ABS-17BIT/18BITエンコーダ、詳細な寸法が含まれています。

X4-36モーター、100W、12N.m、デュアルエンコーダ、17BIT入力、18BIT出力、63rpm、1:36ギア比、CANバスインターフェース、LEDインジケーター。

MYACTUATOR X4-36モーター、100W、12N.m、デュアルエンコーダ、83rpm、1:36比。電源、CAN BUSケーブル、120Ω抵抗、EtherCATケーブル、USB-CANアダプタ付きのCAN BUSモジュールが含まれています。
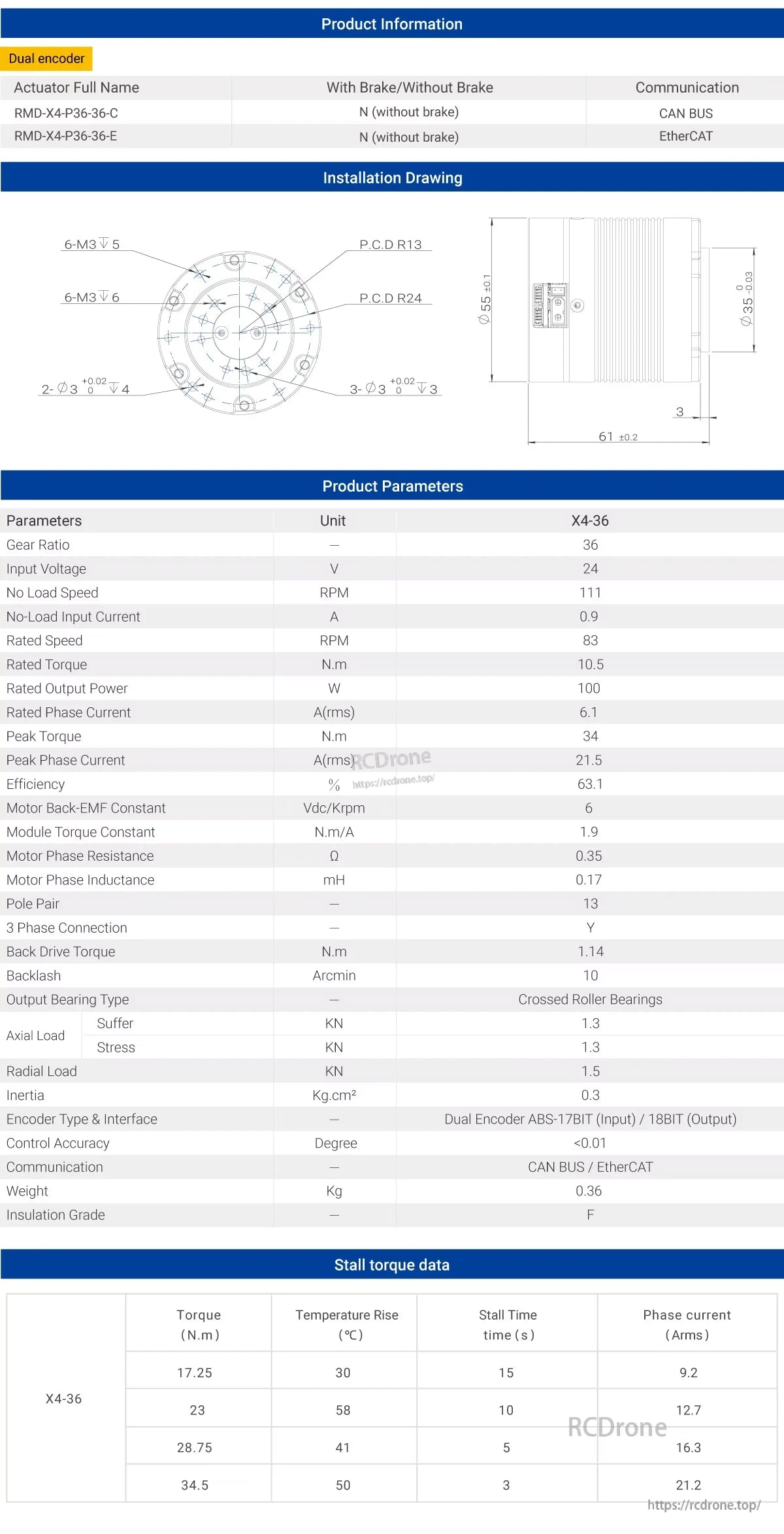
RMD-X4-P36-36モーターはデュアルエンコーダ、36ギア比、24V入力、100W出力、CAN BUS/EtherCATを備えています。定格トルク:10.5 N.m、速度:83 RPM、重量:0.36 kg。スタートルトルクデータにはトルク、温度上昇、時間、位相電流値が含まれています。

インターフェースの詳細には、電源、CAN、およびEtherCATポートが含まれています。パッケージにはモーター、ケーブル、抵抗器、通信モジュールが含まれています。寸法:100x100x70mm。USB-CANアダプタが含まれています。
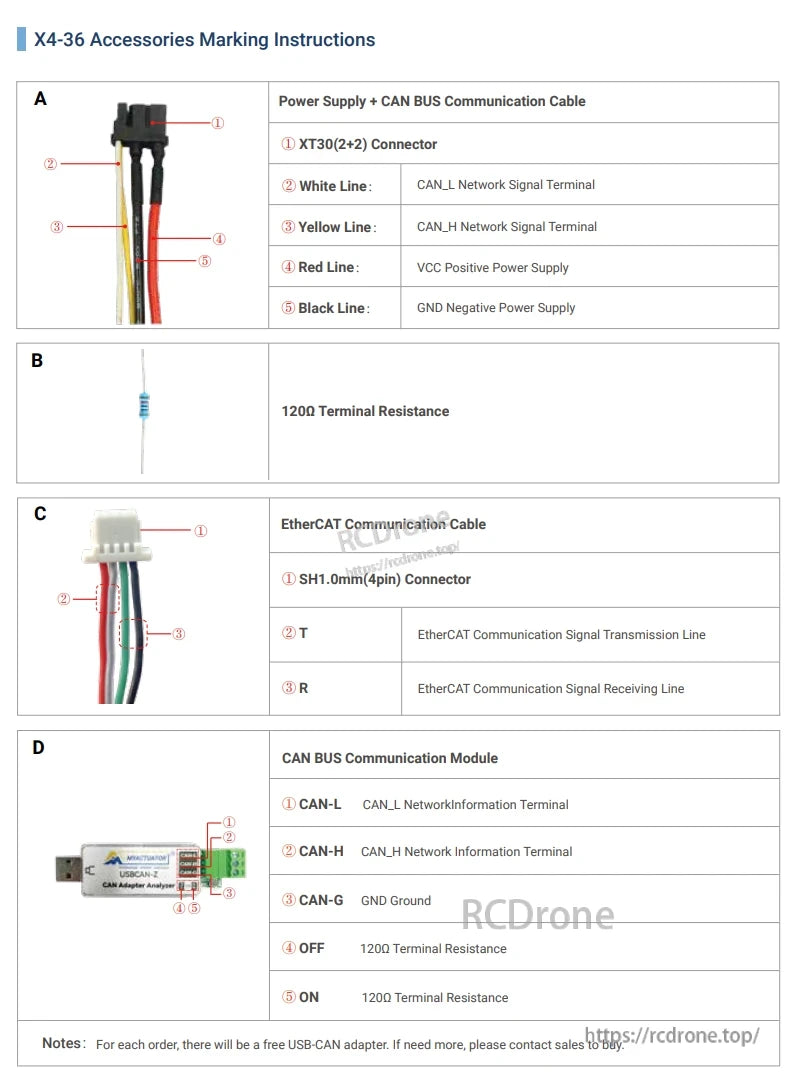
X4-36のアクセサリーには、電源、CAN BUS、EtherCATケーブル、120Ω抵抗、およびCANモジュールが含まれています。詳細には、コネクタ、ワイヤーの色、信号線、および通信と電源接続のための端子設定が含まれています。各注文にはUSB-CANアダプタが含まれています。
Related Collections





