





OYMotion ROH-AP001 デクストラスロボットハンド、6自由度、11関節、力センサー、UART/RS485/CAN、PID制御、0.7秒
OYMotion ROH-AP001 デクストラスロボットハンド、6自由度、11関節、力センサー、UART/RS485/CAN、PID制御、0.7秒
OYMotion
受取状況を読み込めませんでした
概要
OYMotion ROH-AP001 デクスタラスハンドは、11の可動関節と6つの内蔵モータードライバーを備えたロボットハンドで、6つのアクティブな自由度を提供します。内蔵のPIDモーター制御アルゴリズムにより、物体の正確で再現可能な把持と操作が可能です。各指には、把持力のリアルタイム監視とクローズドループ制御のための力センサーが統合されています。物理インターフェースには、UART、RS485、またはCAN FDが含まれ、SerialCtrl専用シリアルプロトコル、ModBus-RTU、およびCANプロトコルをサポートしています。SDKを介した二次開発のためにROS/ROS2プラットフォームがサポートされています(ライセンス契約が必要です)。
主な特徴
- 6つのアクティブDOFと11の関節; 自然なグリップのための独立したモーター駆動の指。
- 内蔵モータードライバーとPID制御; すべての駆動がハンドに統合されています。
- 各指に力センサーを搭載し、触覚フィードバックとリアルタイムの力制御を実現しています。
- パワー付きの親指回転と折りたたみ可能な指デザイン。
- 指先でのタッチスクリーン操作をサポート。
- 高速動作:0.7秒での全範囲の曲げ/伸ばしと0.7秒での親指の全範囲回転。
- 耐荷重:4本の指(曲げた状態)で最大30Kg、1本の指(曲げた状態)で10Kg、1本の指(伸ばした状態)で8Kg。
- 人間のようなサイズと比率;柔らかい指先パッドとシリコン製グローブ;カスタマイズされた手首デザイン;メッセージビーパー。
- インターフェースとプロトコル:UART/RS485/CAN、SerialCtrlおよびModBus-RTUを使用;CANは1Mボーレート。
- 使用されている材料:アルミニウム合金、亜鉛合金、ステンレス鋼、シリコン、プラスチック。
仕様
| アクティブDOF | 6 |
| 可動関節 (関節部) | 11 |
| 中指の先端から手首までの垂直距離 | 183 mm |
| 親指の先端から手首までの垂直距離 | 95 mm |
| 親指の長さ | 111 mm |
| 最大手のひら幅 | 82 mm |
| 手首の直径 | 49 mm |
| 親指側の最大開閉角度 | 0~31 ° |
| 親指と手のひらの最大開閉角度 | 0~50 ° |
| 親指の外旋角度 | 0~90 ° |
| 最大速度での全範囲の屈曲/伸展時間 | 0。7秒 |
| 最大速度でのフルレンジの親指の回転時間 | 0.7秒 |
| 伸ばした状態での各指先のアクティブフォース | ≥0.5 Kgf |
| 曲げた状態での各指先のアクティブフォース | ≥1.0 Kgf |
| 親指先の最大アクティブフォース | ≥1.0 Kgf |
| 曲げた状態での4本の指の最大受動荷重 | 30 Kg |
| 曲げた状態での各指の最大受動荷重 | 10 Kg |
| 伸ばした状態での各指の最大受動荷重 | 8 Kg |
| 指のタッチスクリーン機能 | 対応 |
| 指の力フィードバック | 対応 |
| 動作環境温度 | -10 °C ~ +40 °C |
| 動作環境湿度 | 最大相対湿度 85% |
| 設計サービス寿命 | 3年 |
| 重量(手首を含む) | 640 g ± 5 g |
| 通信インターフェース | UART/RS485/CAN |
| ボーレート | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| サポートされているプロトコル | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| 材料 | アルミニウム合金; 亜鉛合金; ステンレス鋼; シリコン; プラスチック |
アプリケーション
- ロボットエンドエフェクタおよびヒューマノイドロボット。
- 教育および研究機器。
- バイオニック義肢。
- 産業オートメーションおよびAGVシステム。
ご注文のサポート、統合ガイダンス、または技術サポートについては、[email protected] orにお問い合わせいただくか、https://rcdrone.top/をご覧ください。
マニュアル
詳細

ROHandは、内蔵のPIDモーター制御により±1mmの位置精度を提供し、つまむ動作や握る動作などの人間の手の動きを模倣するための6つのアクティブな自由度を提供します。ヒューマノイドロボット、ロボットエンドエフェクター、検査システム、インテリジェントバイオニック義肢、教育または研究用途に最適で、その設計は複雑なタスクにおける多様で精密な操作をサポートします。
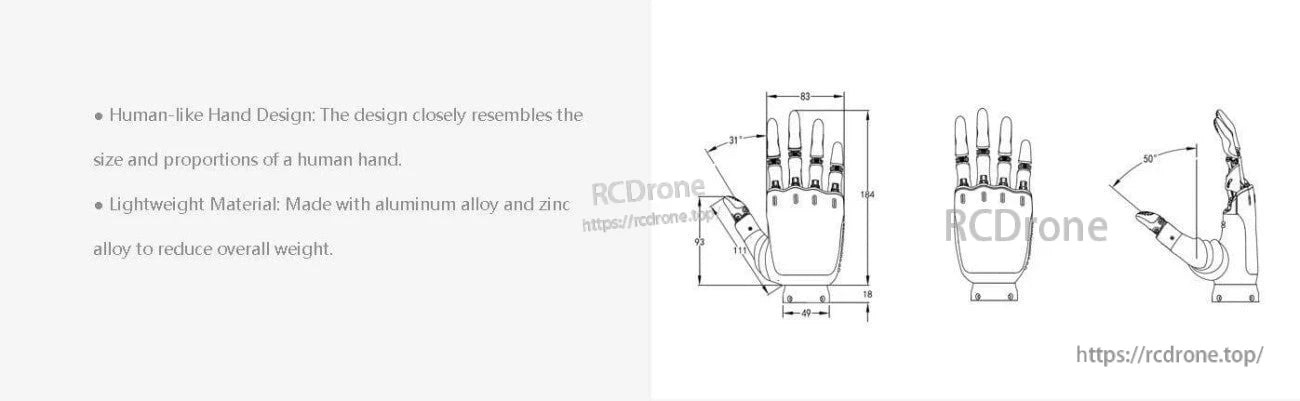
軽量のアルミ亜鉛合金製で、正確な寸法を持つ人間のような器用なロボットハンド。

OYMotion ROH-AP001の巧妙なロボットハンドは人間の比率を模倣し、関節のある指とセンサーを備え、正確で実物大のロボット操作を実現します。
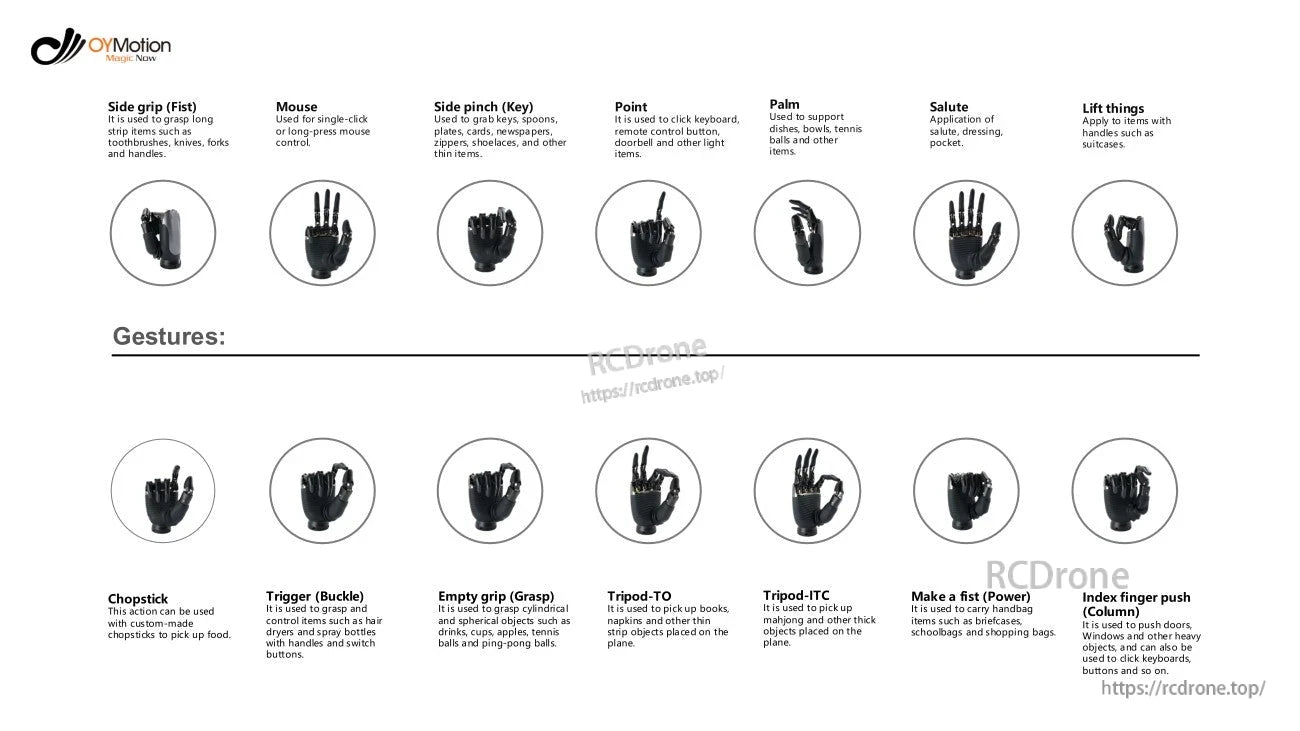
OYMotionロボットハンドは、つかむ、指さす、持ち上げるなどの14の正確なジェスチャーを実行し、箸を使ったり、バッグを持ったり、キーボードをクリックしたりする日常のタスクを処理し、高度な器用さと実用性を示します。

OYMotionロボットハンドは、モーター駆動の指、折りたたみ式デザイン、柔らかいパッド、動力付きの親指、シリコン製のグローブ、内蔵アクチュエーション、ビーパー、カスタムリスト、RS485コネクタを提供し、器用で自然なグリップを実現します。
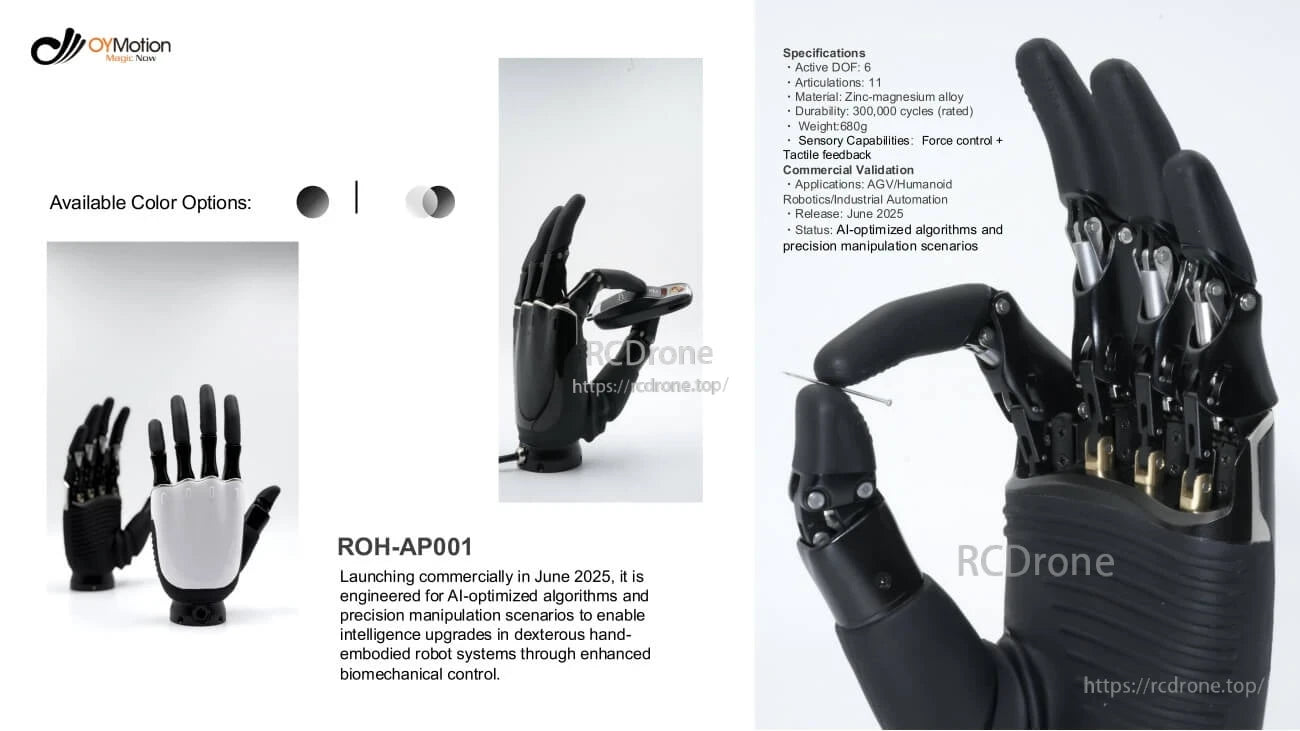
OYMotion ROH-AP001の巧妙なロボットハンドは、6つのアクティブDOF、11の関節、亜鉛-マグネシウム合金製、300kサイクルの耐久性、680gの重さを持ち、AIおよび精密作業のための力/触覚フィードバックを提供します—2025年6月に発売予定です。

OYMotion ROH-AP001ロボットハンドは、モーター駆動の指、動力付きの親指、シリコン製のグローブ、内蔵アクチュエーションを備えています。アルミニウム、亜鉛、鋼、シリコン、プラスチックで構成されており、ブザー、カスタムリスト、RS485プロトコル、折りたたみデザイン、圧力スプリングが含まれています。
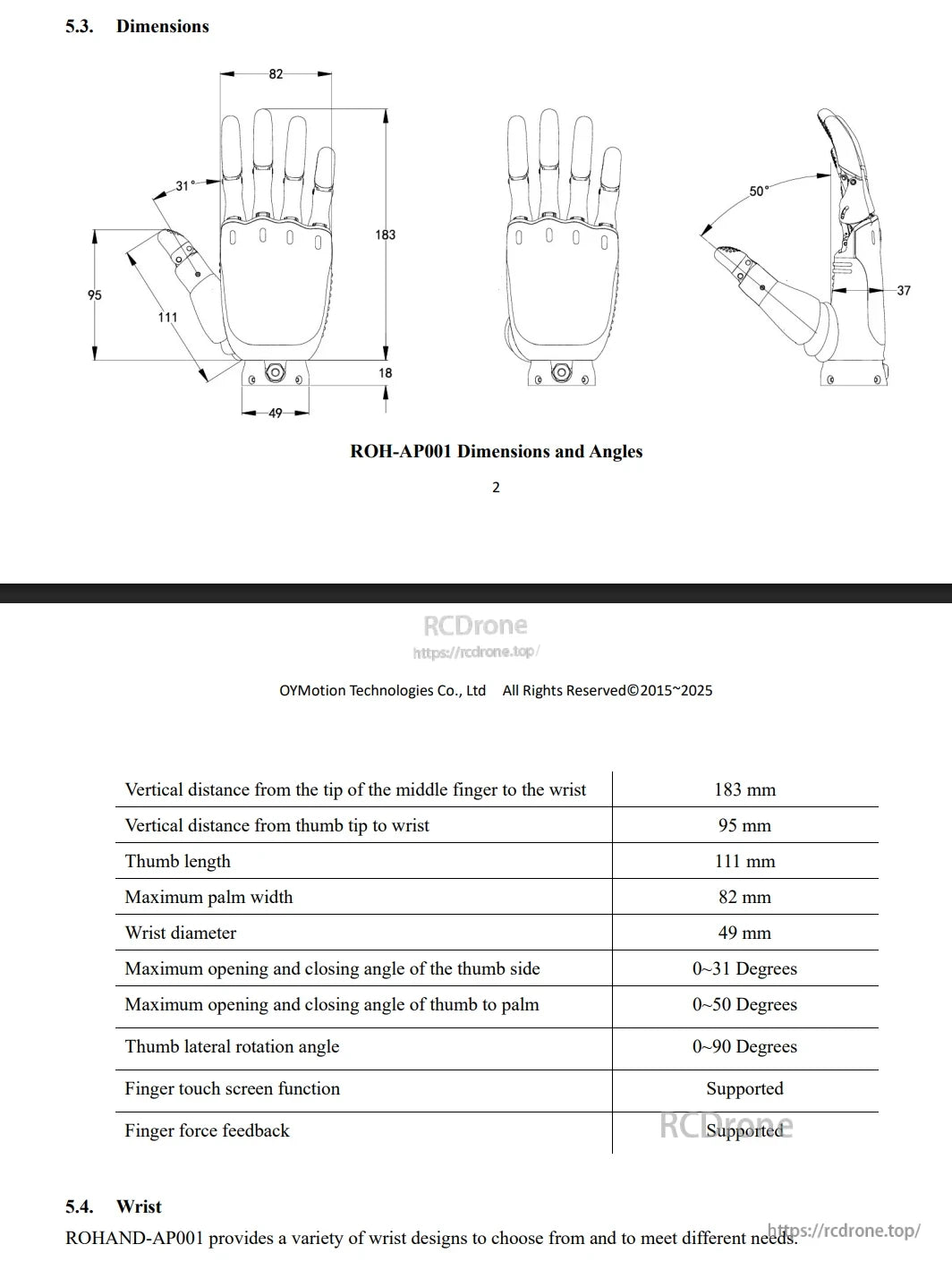
ROH-AP001ロボットハンドの寸法は、指から手首までの高さ183mm、親指から手首までの長さ95mm、親指の長さ111mm、手のひらの幅82mm、手首の直径49mmです。親指の角度:側面0-31°、手のひらに対して0-50°、回転0-90°。タッチスクリーンとフォースフィードバックをサポートしています。
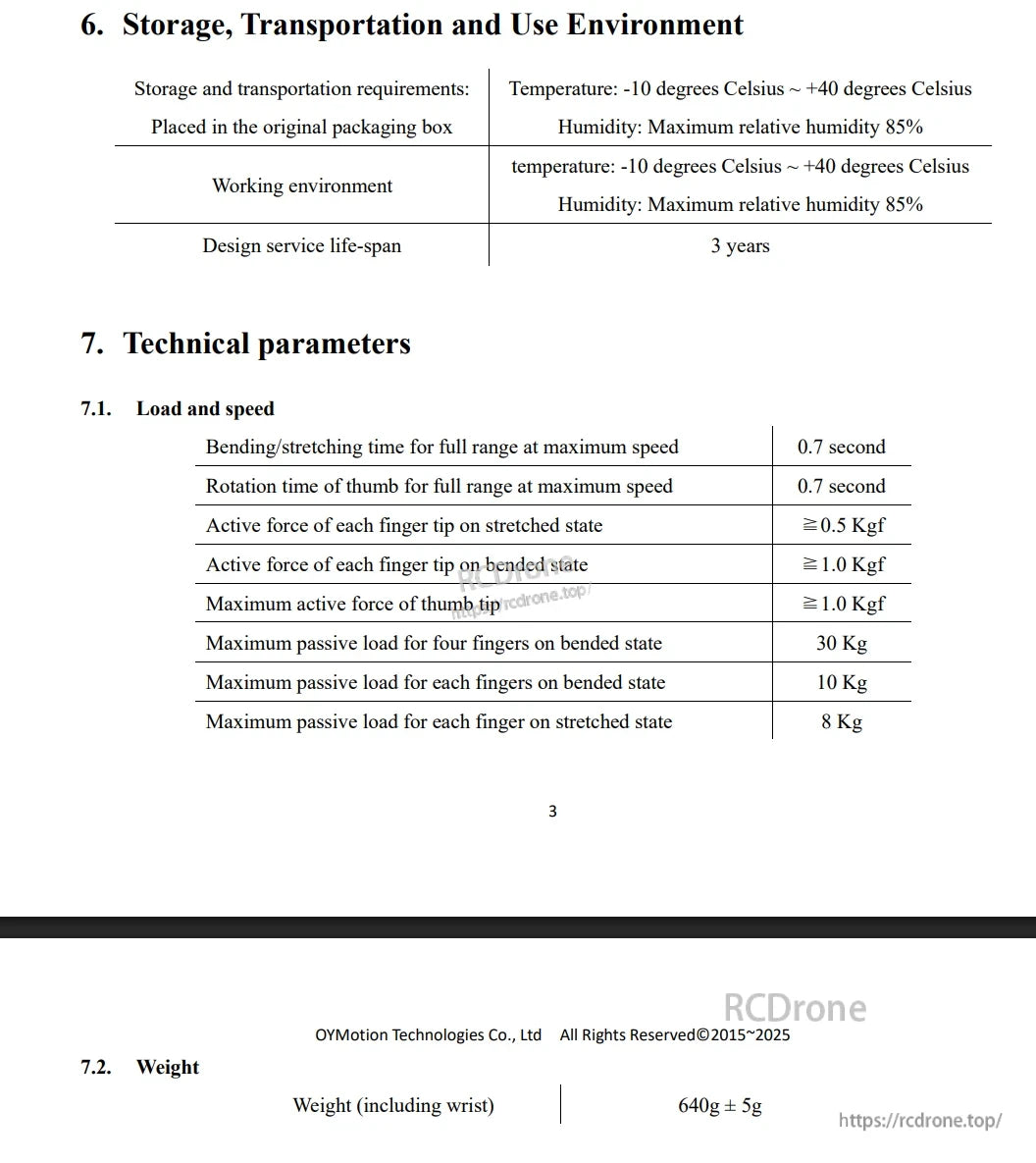
OYMotion ROH-AP001ロボットハンドは、-10°Cから+40°Cの間で動作し、最大湿度85%です。設計寿命:3年。重量:640g ±5g。指のアクティブフォースは≥0.5–1.0 Kgf; 4本の指で最大30kgのパッシブ負荷に対応します。





