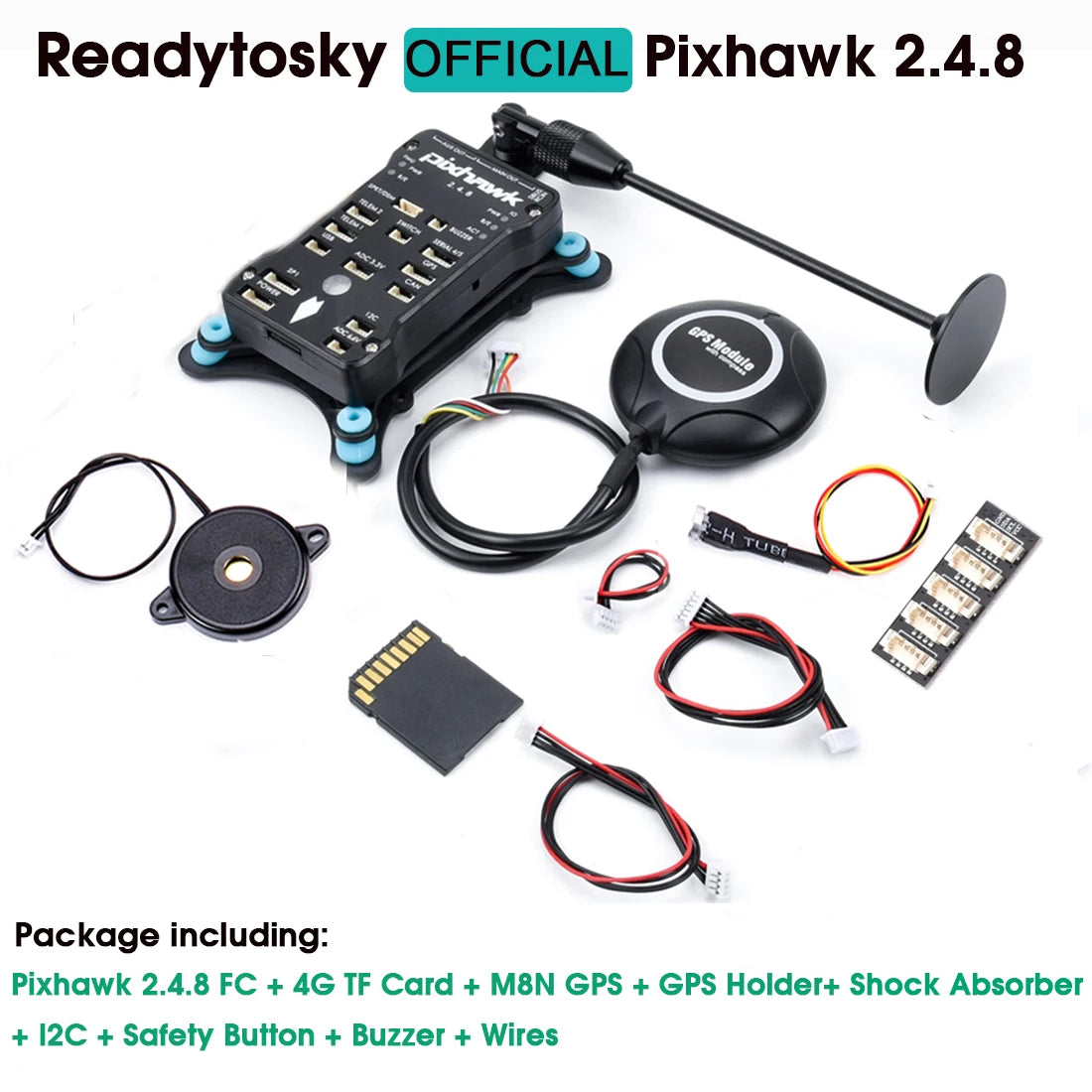


1.接続方法
6P ラインを使用して pixhawk フライト コントローラーに接続します。

ファームウェアが異なるため、一部のファームウェアでは 2 つのポートを使用できますが、一部のファームウェアでは 1 つのポートしか使用できません。したがって、接続に使用可能なポートの 1 つを見つけてください。
PX4 ファームウェアを使用する場合、TELEM1 のみが使用でき、TELEM2 は使用できません。
Ardupilot ファームウェアの場合は、TELEM2 ポートを使用することをお勧めします。または、接続に使用可能なポートの 1 つを見つけます。
PX4 ファームウェアの場合は、TELEM1 ポートを使用する必要があります。
2.使い方は?
ご注意ください:Wifi 無線テレメトリ接続を使用する場合、フライト コントロールに電力を供給するには 3DR 電源モジュールまたは 5V ESC を使用する必要があります。 USB の優先順位が無線テレメトリよりも高いため、USB を挿入できません。 USB ケーブルが接続されている場合、無線テレメトリの送信には使用できません。

Wi-Fi ホットスポット名は Drone です。電話またはコンピュータを使用してこのホットスポットに接続し、パスワードは 12345678 です。
注:一部のデバイス (iPhone IOS システムなど) は IP を自動的に取得できないため、手動で設定する必要があります。
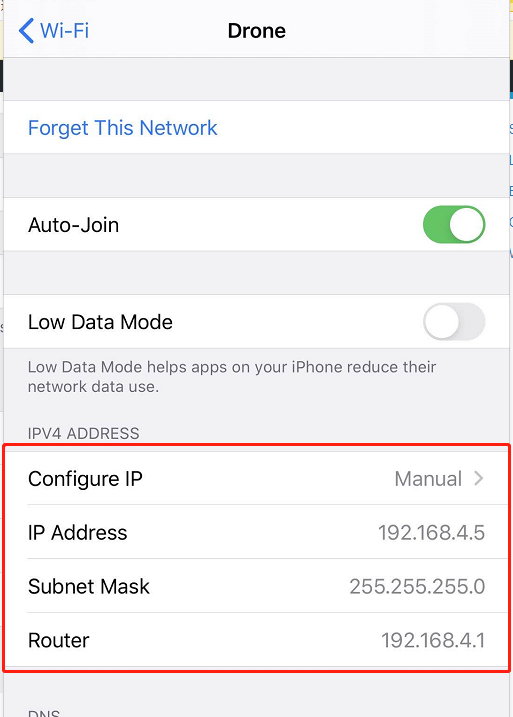
IP の構成を手動として設定します。 IP アドレスを「192.168.4.5」などに設定しますが、「192.168.4.1」には設定できません。最後の数字は 254 を超えることはできません。サブネット マスクを「255.255.255.0」に設定します(この値を設定する必要があります。他の値は設定できません)。ルーターを「192.168.4.1」に設定します(この値を設定する必要があります。他の値は設定できません)
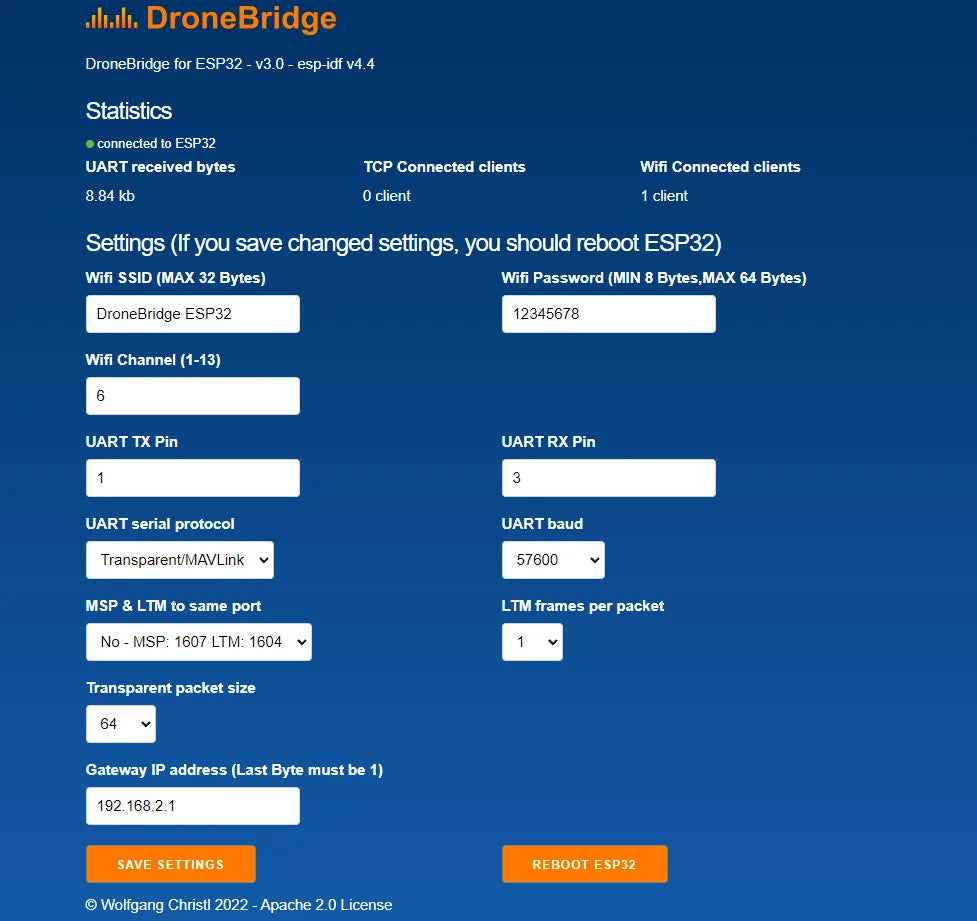
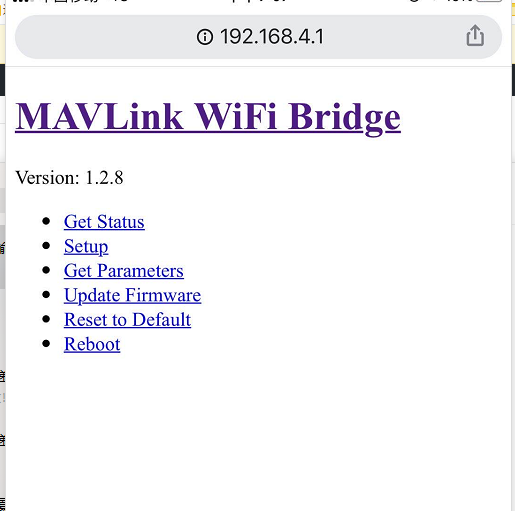
デバイスがこのホットスポットに正常に接続すると、ブラウザを使用して http://192.168.4.1 にアクセスし、パラメータを変更できます。
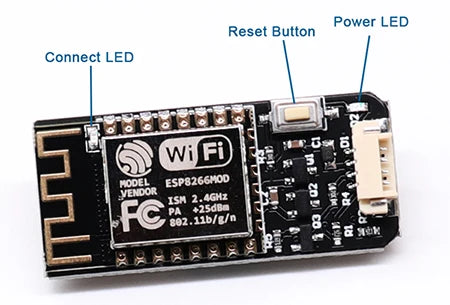
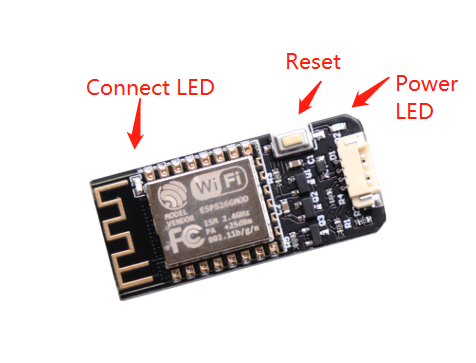
このボタンは再起動ボタンではなくリセット ボタンであることに注意してください。ボタンを押すと、一部のパラメータを変更すると、すべてのパラメータがデフォルトに設定されます。
電源 LED: 電源が投入されると、赤色の LED が点灯します。
LED の接続: 地上制御 (Mission Planner や Qgroundcontrol など) に正常に接続すると、青色の LED が点滅します。地上制御との接続が切断されると、青色の LED が点灯します。
1.ミッションプランナーの使用方法?
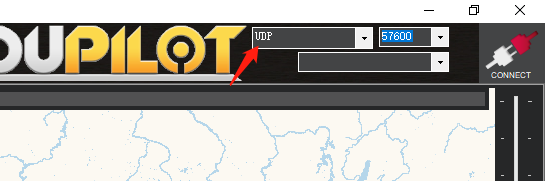
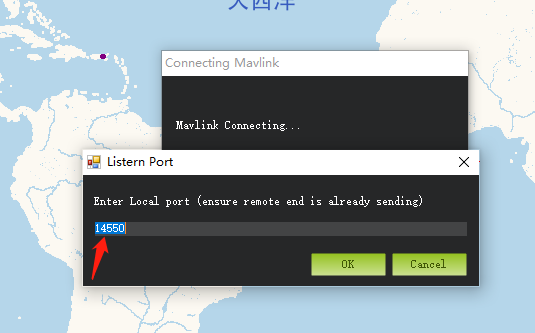
まず、PC をホットスポット ドローンに正常に接続します。 [UDP] を選択します。次に、「接続」ボタンをクリックし、14550ポートを使用します。 「OK」をクリックします。ボーレートを選択する必要はありません。 Wi-Fi モジュールのデフォルトのボーレートは 57600 です。ただし、115200 などでも動作します。
2.電話での使用方法
Android の場合: qgroundcontrol をダウンロードします (pixhawk のみ、APM は対象外)
ここから、http://qgroundcontrol.com/downloads/
ここから DroidPlanner をダウンロードします。https://github.com/DroidPlanner/Tower/releases
iPhone(IOS) の場合: App Store で qgroundcontrol を検索します。
qgroundcontrol (pixhawk のみ、APM ではない) は自動的に接続できます。DroidPlanner は、groundcontrol に接続する前に「UDP」と「14550」ポートを選択する必要があります。