Pixhawk PX4 オートパイロット PIX 2.4.8 32 ビット フライト コントロール - PX4FMU PX4IO 安全スイッチ ブザー 4G SD 付き DIY RC ドローン マルチローター用
Pixhawk PX4 オートパイロット PIX 2.4.8 32 ビット フライト コントロール - PX4FMU PX4IO 安全スイッチ ブザー 4G SD 付き DIY RC ドローン マルチローター用
RCDrone
受取状況を読み込めませんでした
Pixhawk PX4 オートパイロット PIX 2.4.8 32 ビット フライト コントロールの仕様
無線通信: ワイヤ制御
使用: ユニバーサル
原産地: 中国本土

- ボードは PX4FMU+PX4IO と統合されています
- Pixhawk は新しい 32 ビット チップおよびセンサー テクノロジーを採用しています
特徴:
- 高度な 32 ビット CortexM4 ARM 高性能プロセッサ、RTOS NuttX を実行可能リアルタイム オペレーティング システム;
- 14* PWM/アクチュエータ出力;
- バス インターフェイス (UART、I2C、SPI、CAN);
- 統合されたバックアップ電源と障害バックアップ コントローラ、メイン コントローラはバックアップ制御に安全に切り替え;
- 自動および手動モードを提供;
- 冗長電源入力および障害転送機能を提供;
- カラー LED ランプ;
- マルチトーンブザーインターフェイス;
-フライト データを記録するためのマイクロ SD;
プロセッサ:
- 32 ビット 2M フラッシュ メモリ STM32F427 Cortex M4、ハードウェア浮動小数点処理ユニット付き
- メイン周波数: 256K、168MHZ RAM
- 32ビット STM32F103 バックアップ コプロセッサ
センサー:
- L3GD20 3 軸デジタル 16 ビット ジャイロスコープ
- LSM303D 3 軸 14 ビット加速度計 / 磁力計
- MPU6000 6 軸加速度計 / 磁力計
- MS5611 高精度気圧計
インターフェイス:
- 5* UART、1* 互換性高電圧、2* ハードウェア フロー制御
- 2* CAN
- DSM/DSM2/DSM-X サテライトレシーバー互換入力
-Futaba SBUS 互換入力および出力
-PPM 信号入力
-RSSI (PWM または電圧) 入力
-I2C
-SPI
-3.3 および 6.6VADC 入力
- 外部 USB MICRO インターフェイス
パッケージ内容:
1 x 2.4.8 Pixhawk メイン コントロール
1 x 飛行制御シェル
1 x 安全スイッチ
1 x ブザー
1 x 6ピン - 6ピン ライン
1 x 4ピン - 4ピン ライン
1 x 3ピン DuPont ライン
1 x 4G SD カード


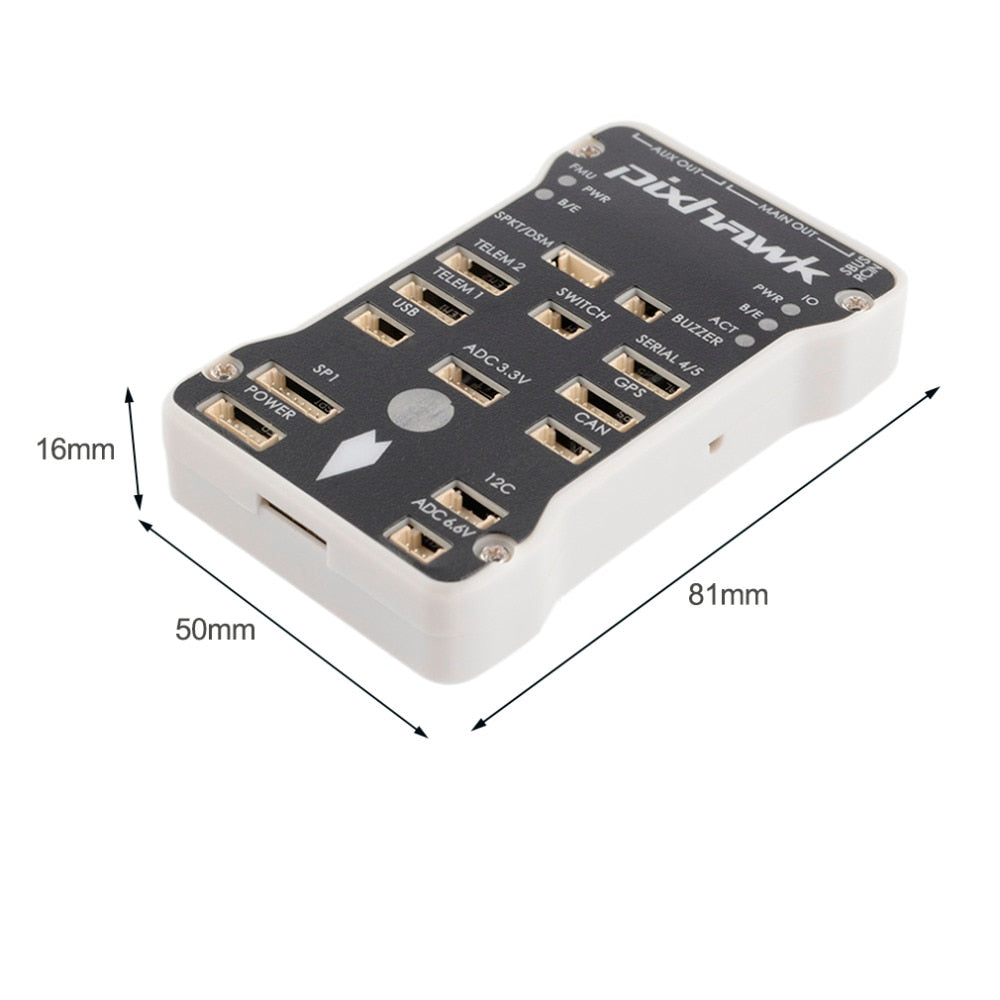
Gps CwN Mou AAut pidunwk a J SKd Jeltm > switch telu HTELLM Uso AdcJ Jv Tower migce Adgody アダプター .


Pixhawk PX4 オートパイロット システム用2.4GHz フライト コントロールを備えた DIY RC ドローン マルチローター、PX4FMU および PX4IO 安全スイッチ ブザーを含み、4G SD カードと互換性があります。

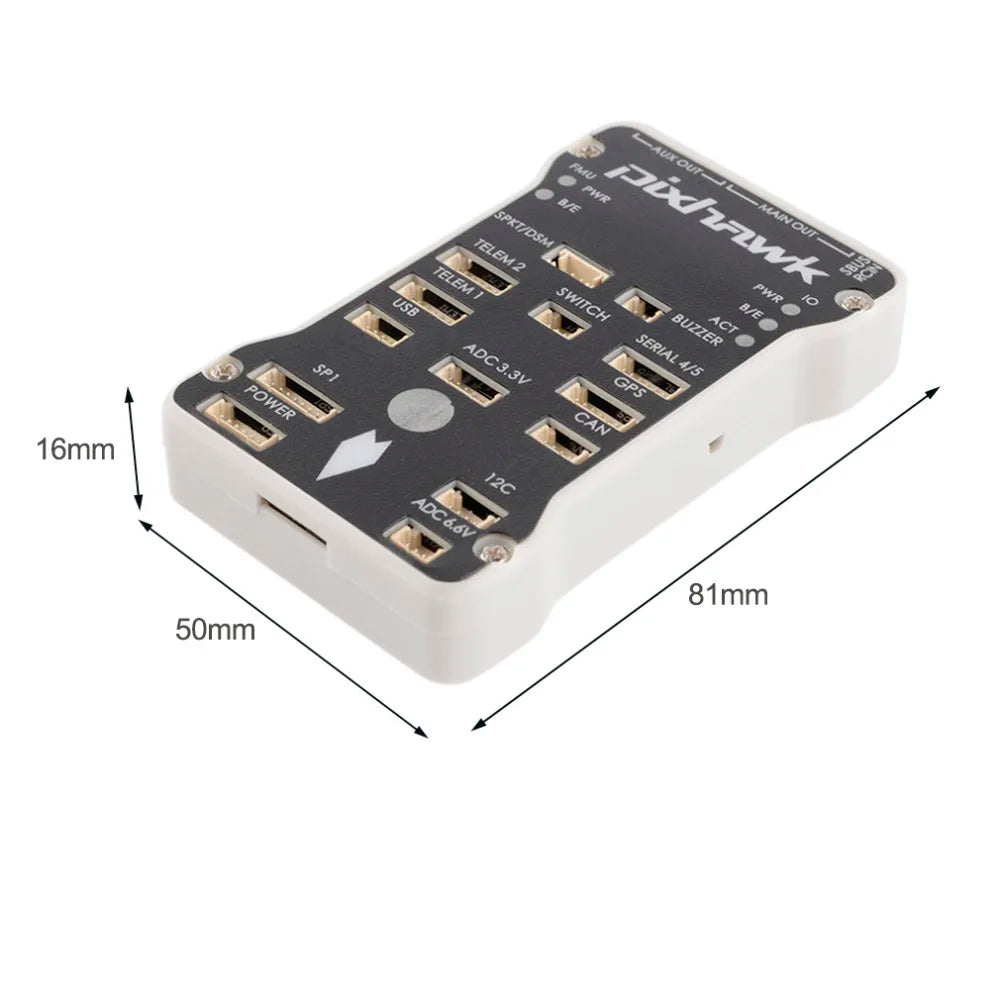

Auxout MANOUT pixdnewk FMU PWR Pwr B/E Bie ACI SPKT/DSM ブザー TELEM 2 スイッチ シリアル 4/5TELEM 1 GPS USB ADC3.Jv CAN 'Sw SPI 12C 電源 ADC 66v KG 単位風袋 ONIOFF CAPACiTTsooOGXI G Idepv 4oo
Related Collections